目录
- 一、前言
- 二、总体设想
- 三、系统的组成
- 四、python代码构建
- 构建一个MessageBroker消息代理类
- 以下这个是常规的MessageBroker类:
- 以下这个是引入协程的MessageBroker类:
- 下面是使用MessageBroker消息代理类
- 构建一个DataProcessor消息预处理类
- 构建一个DataProcessors平行协程处理类
- 综合应用示例
- 五、总结
一、前言
我们知道ROS是一个开源的机器人系统,有人叫他是操作系统,里面有丰富的生态,如导航等,很多大学搞研究都利用它。但是,使用ROS很多是基于linux系统,并且需要按照,学习,同时,很多用ROS可能只是为了使用它的消息发布订阅机制,由于其基于的是进程间的通信,可能对通信的实时性也有一些影响。本章,我们来手搓一个纯python构建的类似ROS系统的消息订阅发布系统,非常轻量级,可以在开发机器人时候,想轻量化不想装ROS系统的朋友们。并且我们把这个消息模块用在了无人机仿真控制环境如下:

接下来开搞…
二、总体设想
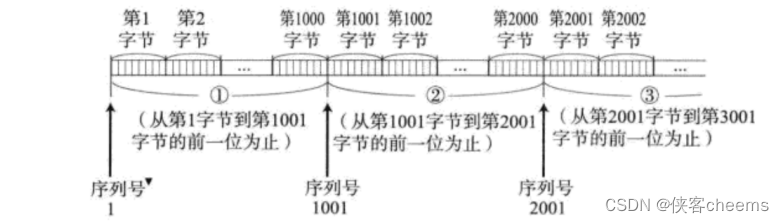
开发这个分布订阅系统的目的,我们想是作为一个机器人系统的“中枢神经”系统,用于跟硬件打交道,并为上层运动控制软件提供消息输入输出的服务,并且需要保持一定的实时性,满足实时控制,整个框架设想如下:

三、系统的组成
如上图所示,我们的一个消息订阅发布系统可以负责跟硬件打交道,通过如串口、以太网口通信的方式去和采集硬件如网关进行通信,这个我们在这里命名为“第一级原始信号通讯”,然后我们会进入一个预处理模块,对原始信号进行一些预处理,这个预处理模块根据需要我们可以自定义修改,预处理的型号变成了上层模块想要的格式和频率的TOPIC(主题)后,可以将这个TOCPIC发布出来,供多个用户订阅后使用,这个过程我们命名为“第二级信号预处理”。经过这个两级处理,从底层传感或者部件采集的不同频率、不同格式数据就变成了可以供上层应用的有固定周期和格式的TOPIC。接下来就可以做各种应用模块了。
四、python代码构建
构建一个MessageBroker消息代理类
python实现的消息代理类其实也非常常见了,网上到处都是,这里我们结合了一下协程的概念,对普通的消息代理类进行了一些优化,利用协程的高性能特性,势必可以在大量的消息来源服务下保持一个好的性能,这部分有待压力测试,发布本博文前并未经过性能测试。源代码如下:
以下这个是常规的MessageBroker类:
class MessageBroker:
#同步消息订阅分发处理
def __init__(self):
self.message_queue = queue.Queue()
self.subscribers = {}
self.running=True
def publish(self, topic, message):
if self.running:
self.message_queue.put((topic, message))
else:
print("MessageBroker is already stopped")
def subscribe(self, topic, callback):
if self.running:
if topic not in self.subscribers:
self.subscribers[topic] = []
self.subscribers[topic].append(callback)
else:
print("MessageBroker is already stopped")
def unsubscribe(self, topic, callback):
if topic in self.subscribers:
if callback in self.subscribers[topic]:
self.subscribers[topic].remove(callback)
def start(self):
self.running=True
def worker():
while True:
topic, message = self.message_queue.get()
#print("worker..")
if message=="close":
print("MessageBroker thread stoped")
break
if topic in self.subscribers:
for callback in self.subscribers[topic]:
callback(message)
self.message_queue.task_done()
thread = threading.Thread(target=worker)
thread.daemon = True
thread.start()
print("broker started at:",thread)
def close(self):
self.running = False
self.subscribers.clear()
self.message_queue.put(('stop', "close"))
del self.message_queue
self.message_queue=queue.Queue()
以下这个是引入协程的MessageBroker类:
class MessageBrokerAsy:
#高性能异步步消息订阅分发处理
def __init__(self):
self.message_queue = queue.Queue()
self.subscribers = {}
self.thread=None
self.running=True
#self.condition = asyncio.Condition()
def publish(self, topic, message):
if self.running:
self.message_queue.put((topic, message))
return True
else:
print("MessageBroker is already stopped")
return
def subscribe(self, topic, callback):
if self.running:
if topic not in self.subscribers:
self.subscribers[topic] = []
#asy_callback=self.make_async(callback)
self.subscribers[topic].append(callback)
return True
else:
print("MessageBroker is already stopped")
return
def unsubscribe(self, topic, callback):
if topic in self.subscribers:
if callback in self.subscribers[topic]:
self.subscribers[topic].remove(callback)
async def main(self):
while True:
if self.running==False:
print("MessageBroker thread stoped")
break
topic, message = self.message_queue.get()
if topic in self.subscribers:
callbacks = self.subscribers[topic]
for callback in callbacks:
if inspect.iscoroutinefunction(callback):
await callback(message)
else:
callback(message)
#asyncio.run(dotasks())
self.message_queue.task_done()
def start(self):
def worker():
self.running=True
asyncio.run(self.main())
thread = threading.Thread(target=worker)
thread.daemon = True
thread.start()
self.thread=thread
print("broker started at:",thread)
def close(self):
self.running = False
time.sleep(1)
self.subscribers.clear()
del self.message_queue
self.message_queue=queue.Queue()
如上所述,我们可以实例化这个类之后,通过start()启动这个消息服务,并且是在新线程中运行,不会影响主线程,也保持了一定的实时性,然后在main()这个消息分发处理方法中,采用了协程处理,这样理论上会提高处理时间。
此外,可以通过subscribe 和unsubscribe 来订阅相关的主题,用publish 发布主题:
下面是使用MessageBroker消息代理类
if __name__ == '__main__':
MB=MessageBrokerAsy()#创建一个消息系统
MB.start()#启动一个消息系统
# 订阅者1的回调处理函数
async def subscriber1(message):
print("Subscriber 1 received:", message,time.perf_counter())
# 订阅者2的回调函数
def subscriber2(message):
print("Subscriber 2 received:", message)
# 订阅主题为"topic1"的消息,可以支持多个处理函数(用户)
broker.subscribe("topic1", subscriber1)
broker.subscribe("topic1", subscriber2)
for i in range(20):
# 模拟采集数据,发布消息到主题"topic1"
MB.publish("topic1", np.array([11,1.5]))
time.sleep(0.5)
MB.close()
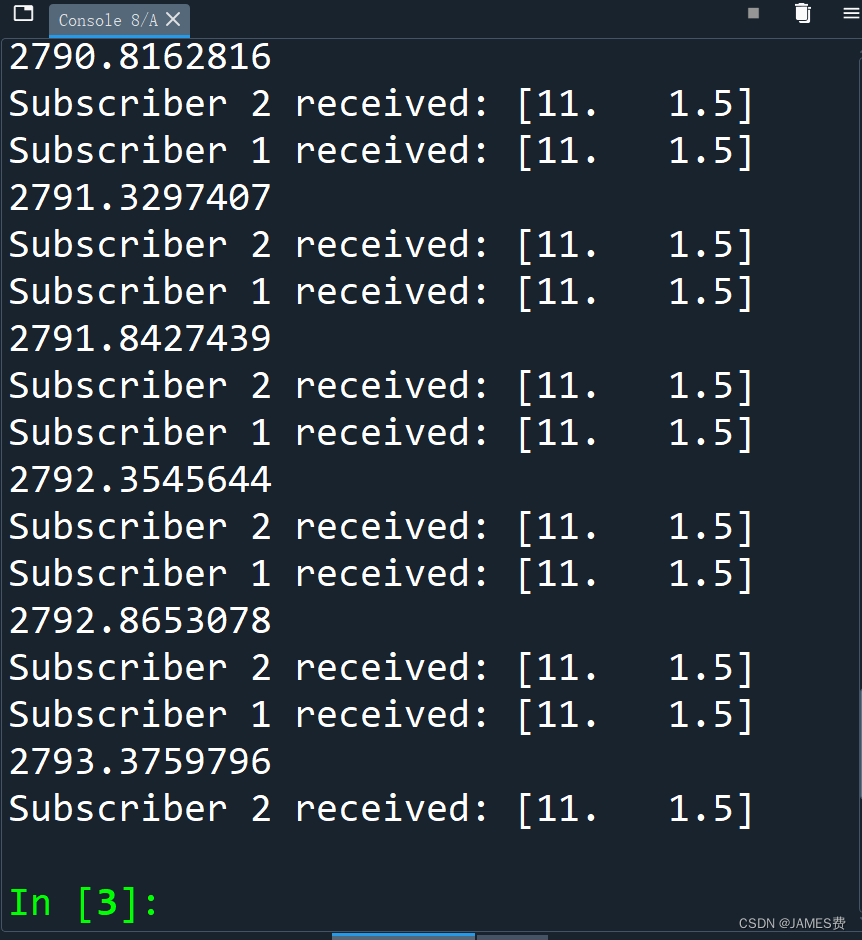
运行如下:
构建一个DataProcessor消息预处理类
根据我们的设想,是要建设一个消息预处理系统,也就是对原始数据进行加工处理,将原始数据按照一定的频率发布出去供上层订阅使用。这个DataProcessor是这么构建的:
class DataProcessor:
def __init__(self, interval,broker=None,topic=None,processer=None):
self.interval = interval
self.data_queue1 = []
self.data_queue2 = []
self.queue_shift=1
if processer==None:#默认为均值过滤器
self.processer=self.Everage_Filter
else:
self.processer=processer
#输出逻辑
if broker==None:
self.broker=self
else:
self.broker=broker
#发布的主题
if topic==None:
self.topic="Notopic"
else:
self.topic=topic
def publish(self, topic, message):
print(topic, message)
def Everage_Filter(self,data_queue):
# 均值过滤,处理队列内的数据的逻辑,数据指定为np格式
if len(data_queue)>0:
average = sum(data_queue) / len(data_queue)
data_queue.clear()
#print("done:",average)
else:
print("empty done:",average,time.perf_counter())
return average
async def process_data(self):
while True:
processed_data=None
if self.queue_shift==1:
data_queue=self.data_queue1
if len(data_queue) > 0:
self.queue_shift=2
# 处理队列内的数据
processed_data = self.processer(data_queue)
print("Processed data1:")
self.broker.publish(self.topic,processed_data)
if self.queue_shift==2:
data_queue=self.data_queue2
if len(data_queue) > 0:
self.queue_shift=1
# 处理队列内的数据
processed_data = self.processer(data_queue)
print("Processed data2:")
self.broker.publish(self.topic,processed_data)
await asyncio.sleep(self.interval)
def add_data(self, data):
# 向队列中添加数据,多个容器,避免冲突
if self.queue_shift==1:
self.data_queue1.append(data)
if self.queue_shift==2:
self.data_queue2.append(data)
async def start(self):
# 启动主循环
#loop = asyncio.get_event_loop()
#loop.create_task(self.process_data())
#loop.run_forever()
return asyncio.create_task(self.process_data())
如上所述,我们在DataProcessor初始化时定义了interval 消息更新的周期,broker 指定的分发模块,topic 预处理完后的消息名称如“机械臂末端坐标”,processer 预处理的自定义函数,预处理默认我们内置了一个在周期内取平均的过滤器。这样就可以把各路原始数据来自一级系统进行预处理后在二级系统的broker中进行发布了。
此外,我们知道原始数据路数非常多,如果使用串行进行预处理肯定是不合理的,特别是用到某些耗时的预处理函数时,那么我们还是引入了协程处理的方式,通过再开启一个线程,并集中创建预处理任务的方式,让各路预处理函数平行运行,这样就提高了效率。于是我们再要构建一个类DataProcessors
构建一个DataProcessors平行协程处理类
这个类的代码如下:
class DataProcessors:
def __init__(self):
self.DataPros=[]
self.tasks=[]
self.stop=False
self.T=None
self.main_queue= queue.Queue()
def add(self,DataPro):
self.DataPros.append(DataPro)
def close(self):
self.stop=True
self.DataPros.clear()
def start(self):
#创建新线程,启动所有周期处理
async def main():
# 启动主循环
# 在主线程中创建并行的协程定时任务
"""
async def datasource(processor):
while True:
#print("Running task 2...")
# 在这里编写您的定时任务逻辑
processor.add_data(101)
processor.add_data(111)
processor.add_data(130)
await asyncio.sleep(0.5) # 设置定时任务的时间间隔为10秒
"""
#task2=datasource
for DataPro in self.DataPros:
self.tasks.append(await DataPro.start())
#await asyncio.gather(task1(), task2(processor))
#task2_obj = asyncio.create_task(task2(DataPro))
while True:
print("DataProcessors main runing")
await asyncio.sleep(5)
if self.stop:
break
#task1_obj.cancel()
#task2_obj.cancel()
print("DataProcessors stoped")
def run():
print("Starting main program...")
asyncio.run(main())
thread = threading.Thread(target=run)
thread.daemon = True
thread.start()
print("DataProcessors started at:",thread)
self.T=thread
return thread
综合应用示例
结合以上三个模块,我们就完成了本标题的一个类ROS机器人消息订阅发布模块,以下是简易使用:
if __name__ == '__main__':
# 示例用法
broker = MessageBrokerAsy()
# 启动消息分发系统
broker.start()
# 创建一个DataProcessor对象
processor = DataProcessor(interval=1,broker=broker,topic="topic2") # 设置时间周期为5秒
DataProcessors1=DataProcessors()
DataProcessors1.add(processor)
T=DataProcessors1.start()
# 订阅者1的回调函数
async def subscriber1(message):
#print("Subscriber 1 received:", message,time.perf_counter())
processor.add_data(message)
# 订阅者1的回调函数
async def subscriber3(message):
print("Subscriber 3 received:", message,time.perf_counter())
# 订阅者2的回调函数
def subscriber2(message):
print("Subscriber 2 received:", message)
# 订阅者2的回调函数
def subscriber4(message):
print("Subscriber 4 received:", message)
# 订阅主题为"topic1"的消息
broker.subscribe("topic1", subscriber1)
#broker.subscribe("topic1", subscriber3)
broker.subscribe("topic1", subscriber2)
broker.subscribe("topic2", subscriber4)
# 取消订阅主题"topic1"的消息
#broker.unsubscribe("topic1", subscriber2)
for i in range(20):
# 发布消息到主题"topic1"
broker.publish("topic1", np.array([11,1.5]))
broker.publish("topic1", np.array([1.1,1.5]))
broker.publish("topic1", np.array([12,1.5]))
broker.publish("topic1", np.array([1.1,1.5]))
time.sleep(0.5)
DataProcessors1.close()
time.sleep(6)
broker.close()
如上所述,我们对一级原始数据通过broker进行发布"topic1"给预处理器processor,processor在processors的线程里周期处理原始数据,处理完后按照周期为1s定时进行发布"topic2","topic2"即为成品数据,给subscriber4使用。
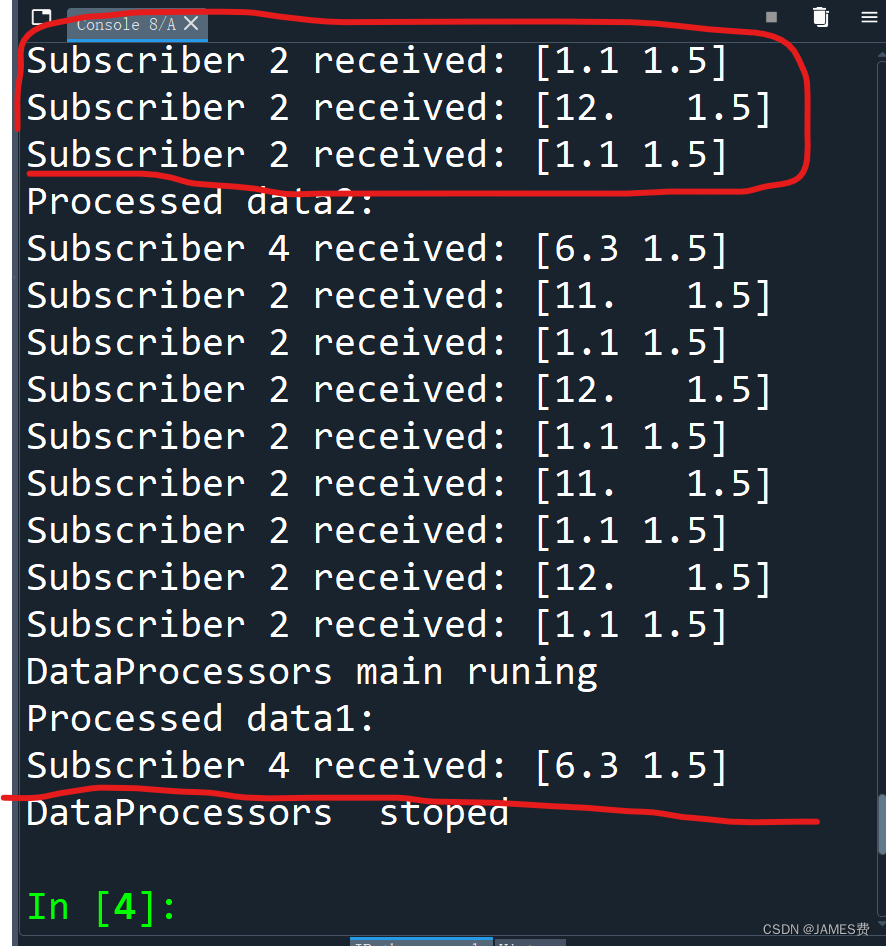
如上图,红框为原始数据,红线为预处理后的成品数据(这里是平均值)。
五、总结
好了到此,我们构建了一个非常轻量的类ROS机器人消息订阅发布模块,当然跟ROS其实没有半毛钱关系,也没法比较,只是一个说头。源码已经上传至本站资源库点击连接。需要请下载获取或者关注公众号回复获取。
下一篇我们将这个系统用于无人机的控制,尽情期待…