本文一开始讲述了解决方案,后面是我做的笔记,用来讲述我的发现流程和探究的 Pico I2C 代码结构。
前提知识
首先要说明一点:Pico 有两个 I2C,也就是两套 SDA 和 SCL。这点你可以在针脚图中名字看出,比如下图的 Pin 4 和 Pin 5是 I2C1 的,而默认的 Pin 6 和 Pin 7 是 I2C0 的。

默认情况下是只开启了第一个 I2C,也就是只有 I2C0 的针脚是可以使用的。如果这种情况下,你哪怕修改了针脚,但不是 I2C0 的,也是不会正常运行的。
如何选择哪个I2C控制器,以及SDA和SCL针脚
在设置之前声明三个变量或宏来方便开发。建议使用宏,这比较符合树莓派的开发风格:
#define I2C i2c0
#define I2C_SDA_PIN 4
#define I2C_SCL_PIN 5
如果宏扩展出错,那么就使用变量。
然后初始化 I2C 的时候来设置使用哪个 I2C 控制器,以及哪个SDA和SCL针脚。下面是设置根据上面的设置,这里使用的是第一个 I2C 控制器,SDA 使用的是 GP4,SCL 使用的是 GP5,频率为1000000:
i2c_init(I2C, 1000000);
gpio_set_function(I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(I2C_SDA_PIN);
gpio_pull_up(I2C_SCL_PIN);
由于有两个 I2C 控制器,那么可以同时使用两套SDA和SCL针脚,但是要注意必须是I2C0和I2C1的针脚,不能是同一个控制器的。
发现历程(选读)
这部分不一定要看。这里记录一下我是怎么知道是这样处理的,顺道了解了一下代码结构和信息传递的流程,万一以后需要就不用花时间翻来翻去了。
第一次尝试
首先分析一下:要定义针脚就要知道针脚这个值是如何被利用的,这样就可以知道如何传递处理这个值了。
一般是在初始化的时候设置使用哪个I2C控制器以及SDA和SCL针脚,代码一般如下:
i2c_init(i2c_default, CLK);
gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
研究《用C/C++修改I2C默认的SDA和SCL针脚》的时候,我知道了默认针脚是在pico.h中配置的的,相关值有三个:PICO_DEFAULT_I2C、PICO_DEFAULT_I2C_SDA_PIN和PICO_DEFAULT_I2C_SCL_PIN,那么只要追溯这三个值就行。
但是这样不好找,引用太多了。所以我就尝试了从另一方面先入手:I2C 是通过i2c_init()函数初始化的,如下:
i2c_init(i2c_default, SSD1306_I2C_CLK);
我需要的只有第一个参数i2c_default,因为这个参数传递了一些信息,第二个参数uint baudrate是传递速率的,和针脚无关。
那么i2c_init()函数的内容是什么呢?知道这个才能知道i2c_default的类型是什么结构,以及内部进行了什么处理。
i2c_init()函数声明在pico-sdk/src/rp2_common/hardware_i2c/i2c.c中,函数参数列表如下:
uint i2c_init(i2c_inst_t *i2c, uint baudrate) {
i2c_reset(i2c);
i2c_unreset(i2c);
i2c->restart_on_next = false;
i2c->hw->enable = 0;
...
// Re-sets i2c->hw->enable upon returning:
return i2c_set_baudrate(i2c, baudrate);
}
那这个i2c_inst_t是个什么数据类型呢?我就继续找它。
在pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h的第 52 行可以看到它是i2c_inst结构体的重命名:
typedef struct i2c_inst i2c_inst_t;
那继续找结构体i2c_inst,这个结构体就在同一个文件里的第 135 行:
struct i2c_inst {
i2c_hw_t *hw;
bool restart_on_next;
};
终点还是第一个变量i2c_hw_t *hw,因为只有它可能会传递针脚的值,那就继续找i2c_hw_t是什么数据类型。
这个数据类型的声明在pico-sdk/src/rp2040/hardware_structs/include/hardware/structs/i2c.h中。换句话说,这个文件就是为i2c_hw_t结构体所准备的:
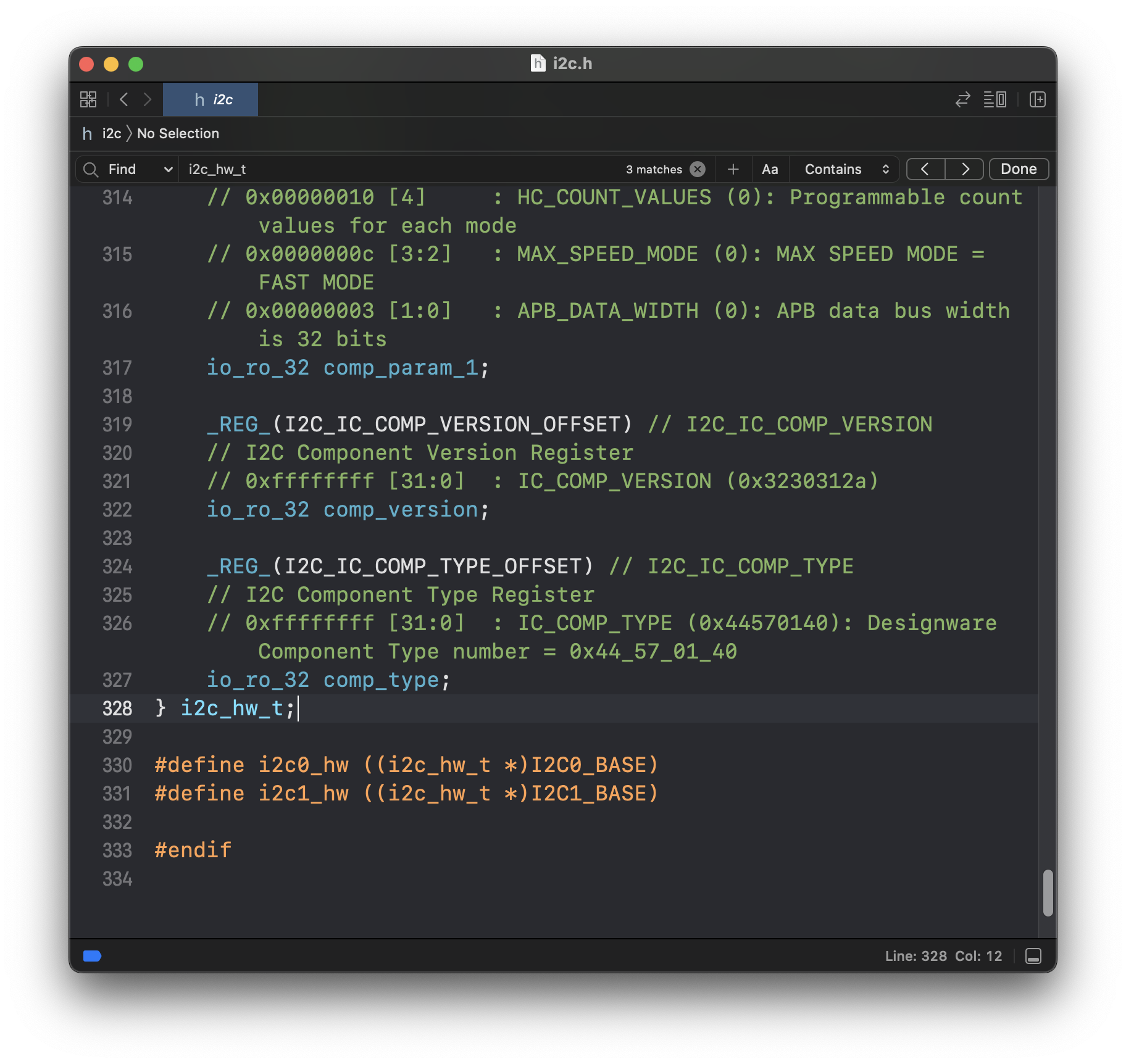
这个结构体存储了很多 I2C 的信息,但还是没找到针脚的信息,那么我就回到一开始在进行寻找。
第二次尝试
最开始我是寻找了i2c_init()的第一个参数的类型i2c_inst_t,收获不大。但是它的值我还没寻找,所以这次从参数值出发i2c_default,这个值是哪定义的呢?
在刚才发现i2c_inst_t声明和定义的pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h头文件中发现了需要的东西(第 76 行):
#ifdef PICO_DEFAULT_I2C_INSTANCE
#define i2c_default PICO_DEFAULT_I2C_INSTANCE
#endif
这个PICO_DEFAULT_I2C_INSTANCE是什么呢?往上一瞅就能看到:
#if !defined(PICO_DEFAULT_I2C_INSTANCE) && defined(PICO_DEFAULT_I2C)
#define PICO_DEFAULT_I2C_INSTANCE (__CONCAT(i2c,PICO_DEFAULT_I2C))
#endif
在这里终于看到一个需要的值:PICO_DEFAULT_I2C,前文可知这个默认为0。
这里的(__CONCAT(i2c,PICO_DEFAULT_I2C))是将i2c和PICO_DEFAULT_I2C的值连接起来了,默认情况下也就是i2c0。也就是说,参数i2c_default就是i2c0。
这个技巧很不错,但是有些编译器用不了,比如我用 Clang x86_64-apple-darwin21.6.0 就无法扩展
PICO_DEFAULT_I2C。
再深入一些
但是这里的i2c0是什么呢?这是个什么类型的数据呢?
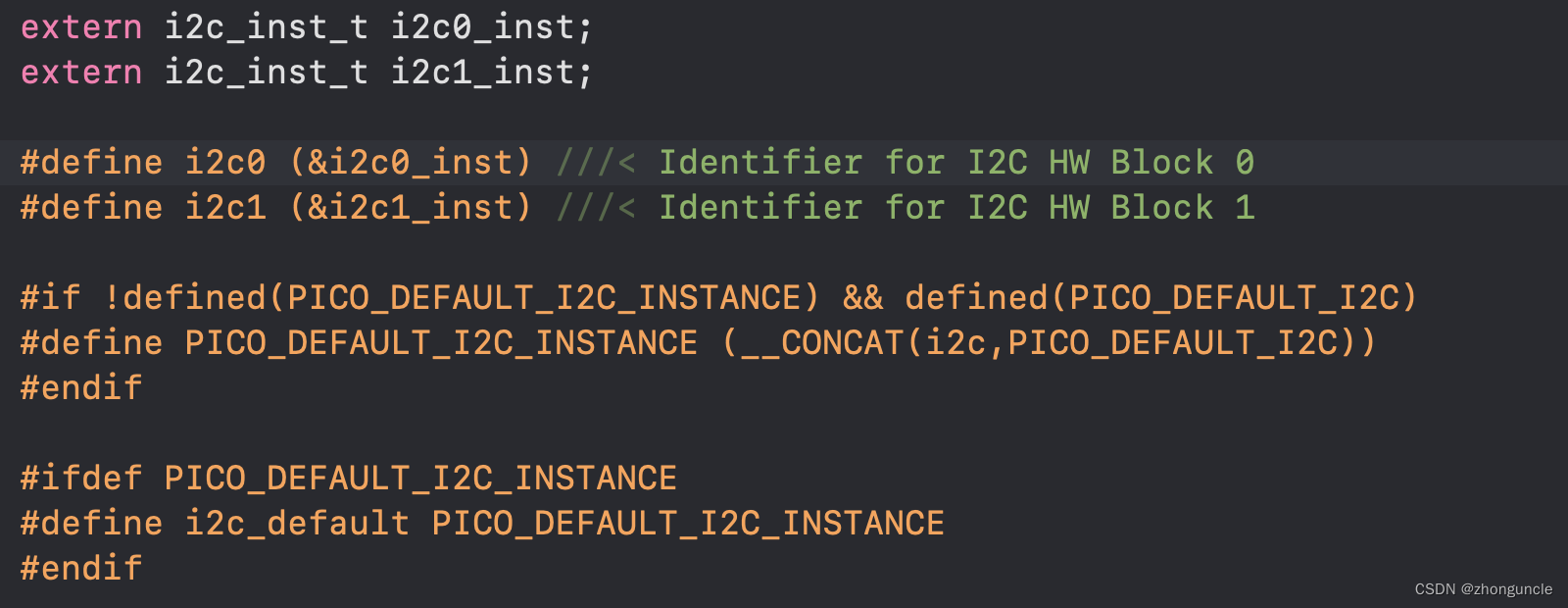
还是在pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h头文件中(如上图)有这样一段:
#define i2c0 (&i2c0_inst) ///< Identifier for I2C HW Block 0
#define i2c1 (&i2c1_inst) ///< Identifier for I2C HW Block 1
可以看到i2c0是i2c0_inst的地址,注释说这是I2C HW Block 0的标识符。从上面的
extern i2c_inst_t i2c0_inst;
extern i2c_inst_t i2c1_inst;
可以看到i2c0_inst和i2c1_inst是外部变量,类型是i2c_inst_t,这个类型之前我看到了定义的结构体:
struct i2c_inst {
i2c_hw_t *hw;
bool restart_on_next;
};
那这个i2c0_inst是在哪声明的?
这部分在pico-sdk/src/rp2_common/hardware_i2c/i2c.c中声明的:
i2c_inst_t i2c0_inst = {i2c0_hw, false};
i2c_inst_t i2c1_inst = {i2c1_hw, false};
这个i2c0_hw又是啥呢?在哪定义的呢?
这是在pico-sdk/src/rp2040/hardware_structs/include/hardware/structs/i2c.h中:
#define i2c0_hw ((i2c_hw_t *)I2C0_BASE)
#define i2c1_hw ((i2c_hw_t *)I2C1_BASE)
i2c0_hw表示((i2c_hw_t *)I2C0_BASE),意思是I2C0_BASE是个指向i2c_hw_t的指针,它的内容在pico-sdk/src/rp2040/hardware_regs/include/hardware/regs/addressmap.h中:
#define I2C0_BASE _u(0x40044000)
#define I2C1_BASE _u(0x40048000)
也就是说I2C0_BASE就是0x40044000,而i2c0_hw的地址就是0x40044000。
补充一点,这里_()是无符号整数的意思,定义在pico-sdk/src/rp2040/hardware_regs/include/hardware/platform_defs:
#ifndef _u
#ifdef __ASSEMBLER__
#define _u(x) x
#else
#define _u(x) x ## u
#endif
#endif
了解了蛮多知识,也希望能帮到有需要的人~