9.4 USART串口数据包
HEX数据包
1)固定包长,含包头包尾

例如陀螺仪的数据,需要XYZ坐标一起打包
2)可变包长,含包头包尾

如果定义的包头包尾刚刚好也是数据,这样容易混淆,解决的办法:
1.限制载荷数据的范围;
2.使用固定长度的数据包,进行数据对齐;
3.增加包头包尾的数量
包头包尾不一定全部都需要,比如可以只需要一个包头,把包尾删掉
固定包长和可变包长的选择问题
文本数据包
1)固定包长,含包头包尾

2)可变包长,含包头包尾

HEX数据包和文本数据包优缺点:
HEX数据包传输直接,解析数据非常简单,适合一些模块发送原始的数据,比如使用串口通信的陀螺仪和温湿度传感器等;
文本数据包数据直观易理解,非常灵活,比较适合输入指令进行人机交互的场合,比如蓝牙模块常用的AT指令,CNC和3D打印的常用G代码。
HEX数据包接收
在程导设计中,需没计一个能记住不同状态的机制,在不同状态执行不同的操作,同时还要进行状态的合理转移,这种程序设计思维称为状态机,
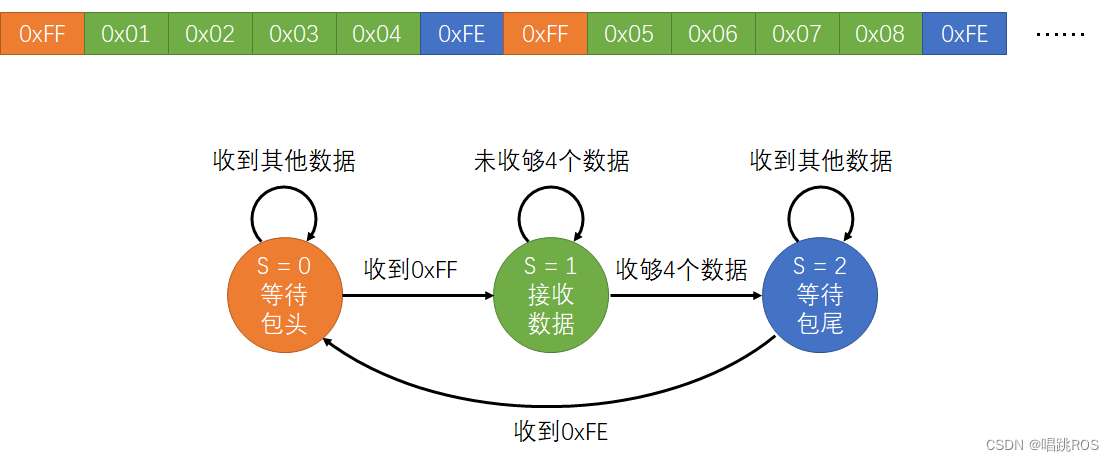
第一个状态(S=0):等待包头;第二个状态(S=1):接收数据;第三个状态(S=2):等待包尾。
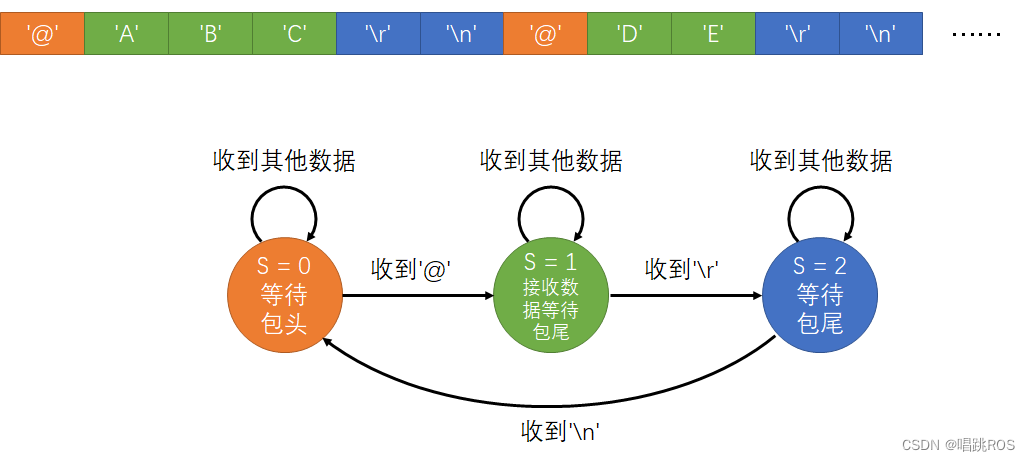
文本数据包接收
9.5 串口收发HEX数据包&串口收发文本数据包
1)串口收发HEX数据包
主函数:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t KeyNum;
int main(void)
{
OLED_Init();
Key_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
Serial_TxPacket[0] = 0x01;
Serial_TxPacket[1] = 0x02;
Serial_TxPacket[2] = 0x03;
Serial_TxPacket[3] = 0x04;
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Serial_TxPacket[0] ++;
Serial_TxPacket[1] ++;
Serial_TxPacket[2] ++;
Serial_TxPacket[3] ++;
Serial_SendPacket();
OLED_ShowHexNum(2, 1, Serial_TxPacket[0], 2);
OLED_ShowHexNum(2, 4, Serial_TxPacket[1], 2);
OLED_ShowHexNum(2, 7, Serial_TxPacket[2], 2);
OLED_ShowHexNum(2, 10, Serial_TxPacket[3], 2);
}
if (Serial_GetRxFlag() == 1)
{
OLED_ShowHexNum(4, 1, Serial_RxPacket[0], 2);
OLED_ShowHexNum(4, 4, Serial_RxPacket[1], 2);
OLED_ShowHexNum(4, 7, Serial_RxPacket[2], 2);
OLED_ShowHexNum(4, 10, Serial_RxPacket[3], 2);
}
}
}
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
//记得在头文件声明数组外部可调用,加上extern
uint8_t Serial_TxPacket[4];
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
//第一步,开启时钟,把需要用的USART和GPIO的时钟打开
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//第二步,GPIO初始化,把TX配置成复用推挽输出
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//把RX配置成上拉输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//第三步,初始化USART,直接使用一个结构体
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //同时开启发送和接收模式
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
//配置中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启RXNE标志位到NVIC的输出
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
//第四步,开启USART,发送功能准备完毕
USART_Cmd(USART1, ENABLE);
}
//发送一个字节数据的函数
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
//发送一个数组数据的函数
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
//发送一个字符串数据的函数
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
//次方函数,X的Y次方
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
//发送一个数字数据的函数(从高位到低位)
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
//fputc函数重定向到串口,print打印就是不断调用fputc函数一个个打印的
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
//对sprintf函数进行封装(char *format:用来接收格式化字符串,...:用来接收后面可变参数列表)
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
//发送数据包
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF); //发送包头
Serial_SendArray(Serial_TxPacket, 4); //发送数据
Serial_SendByte(0xFE); //发送包尾
}
//封装一个函数读取标志位
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
//状态机
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0; //用于记录接收了几个数据(静态变量的生命周期与局部变量不同,在进行中断时不会被刷新)
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0) //等待包头
{
if (RxData == 0xFF)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1) //接收数据
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
if (pRxPacket >= 4)
{
RxState = 2;
}
}
else if (RxState == 2) //等待包尾
{
if (RxData == 0xFE)
{
RxState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //读后自动清除
}
}
2)串口收发文本数据包
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gtuMcaaM-1693138633592)(32单片机.assets/image-20230424101530199.png)]](https://img-blog.csdnimg.cn/f34ba35668cb401384863c5e5961e6cb.png)
主函数:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include <string.h>
int main(void)
{
OLED_Init();
LED_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
while (1)
{
if (Serial_RxFlag == 1)
{
OLED_ShowString(4, 1, " "); //擦除第四行,避免窄屏oled遗漏出来长的数据字符串
OLED_ShowString(4, 1, Serial_RxPacket); //然后再写入
if (strcmp(Serial_RxPacket, "LED_ON") == 0) //strcmp函数用于判断两个字符串是否相等,相等为0
{
LED1_ON();
Serial_SendString("LED_ON_OK\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_ON_OK");
}
else if (strcmp(Serial_RxPacket, "LED_OFF") == 0)
{
LED1_OFF();
Serial_SendString("LED_OFF_OK\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_OFF_OK");
}
else
{
Serial_SendString("ERROR_COMMAND\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "ERROR_COMMAND");
}
Serial_RxFlag = 0;
}
}
}
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
//记得在头文件声明数组外部可调用,加上extern
char Serial_RxPacket[100];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
//第一步,开启时钟,把需要用的USART和GPIO的时钟打开
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//第二步,GPIO初始化,把TX配置成复用推挽输出
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//把RX配置成上拉输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//第三步,初始化USART,直接使用一个结构体
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //同时开启发送和接收模式
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
//配置中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启RXNE标志位到NVIC的输出
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
//第四步,开启USART,发送功能准备完毕
USART_Cmd(USART1, ENABLE);
}
//发送一个字节数据的函数
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
//发送一个数组数据的函数
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
//发送一个字符串数据的函数
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
//次方函数,X的Y次方
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
//发送一个数字数据的函数(从高位到低位)
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
//fputc函数重定向到串口,print打印就是不断调用fputc函数一个个打印的
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
//对sprintf函数进行封装(char *format:用来接收格式化字符串,...:用来接收后面可变参数列表)
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
//状态机
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0; //用于记录接收了几个数据(静态变量的生命周期与局部变量不同,在进行中断时不会被刷新)
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0) //等待包头
{
if (RxData == '@' && Serial_RxFlag == 0) //同时满足才执行,避免数据发送过快导致数据包错位
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1) //接收数据
{
if (RxData == '\r') //判断第一个包尾
{
RxState = 2;
}
else
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
}
}
else if (RxState == 2)
{
if (RxData == '\n') //判断第二个包尾
{
RxState = 0;
Serial_RxPacket[pRxPacket] = '\0'; //给字符组最后一个字符加一个结束标志位\0,方便后续处理
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //读后自动清除
}
}
注意:数据发送不能过快,否则程序会没有反应