详细内容在这篇论文:Layer Normalization
训练深度神经网络需要大量的计算,减少计算时间的一个有效方法是规范化神经元的活动,例如批量规范化BN(batch normalization)技术,然而,批量规范化对小批量大小(batch size)敏感并且无法直接应用到RNN中(recurrent neural networks),为了解决上述问题,层规范化LN(Layer Normalization)被提出,不仅能直接应用到RNN,还能显著减少训练时间。与批量归一化不同,层规范化直接根据隐藏层内神经元的总输入估计归一化统计数据,因此不会在训练案例之间引入任何新的依赖关系。
背景
A feed-forward neural network is a non-linear mapping from a input pattern
x
\mathbf{x}
x to an output vector
y
y
y. Consider the
l
th
l^{\text {th }}
lth hidden layer in a deep feed-forward, neural network, and let
a
l
a^l
al be the vector representation of the summed inputs to the neurons in that layer.
a
i
l
a_i^l
ail是第
l
l
l层第
i
i
i个神经元的线性加权输出。 The summed inputs are computed through a linear projection with the weight matrix
W
l
W^l
Wl and the bottom-up inputs
h
l
h^l
hl given as follows:
a
i
l
=
w
i
l
⊤
h
l
h
i
l
+
1
=
f
(
a
i
l
+
b
i
l
)
a_i^l=w_i^{l^{\top}} h^l \quad h_i^{l+1}=f\left(a_i^l+b_i^l\right)
ail=wil⊤hlhil+1=f(ail+bil)
where f ( ⋅ ) f(\cdot) f(⋅) is an element-wise non-linear function(激活函数) and w i l w_i^l wil is the incoming weights to the i t h i^{t h} ith hidden units and b i l b_i^l bil is the scalar bias parameter. The parameters in the neural network are learnt using gradient-based optimization algorithms with the gradients being computed by back-propagation.
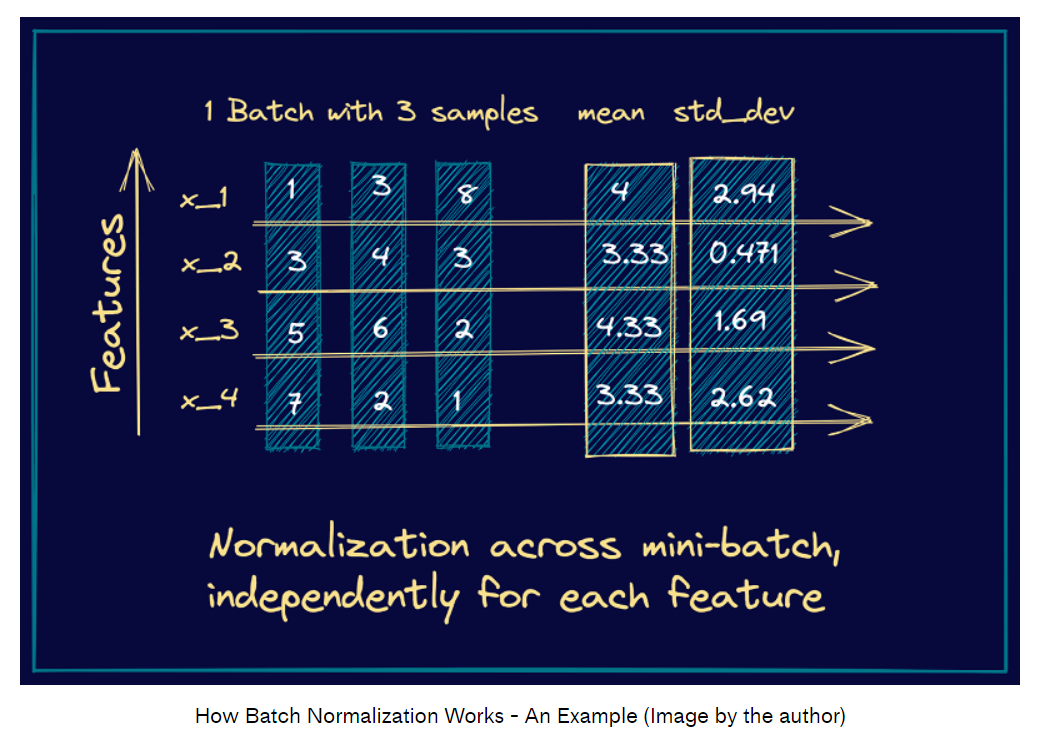
Batch Normalization
BN是为了减少协变量偏移提出的,它在训练阶段对隐神经元加权输出进行规范化,例如,对于
l
t
h
l^{th}
lth层的
i
t
h
i^{th}
ith个加权输出
a
i
l
a_i^l
ail,BN根据输入数据的分布进行了缩放
a
ˉ
i
l
=
g
i
l
σ
i
l
(
a
i
l
−
μ
i
l
)
μ
i
l
=
E
x
∼
P
(
x
)
[
a
i
l
]
σ
i
l
=
E
x
∼
P
(
x
)
[
(
a
i
l
−
μ
i
l
)
2
]
\bar{a}_i^l=\frac{g_i^l}{\sigma_i^l}\left(a_i^l-\mu_i^l\right) \quad \mu_i^l=\underset{\mathbf{x} \sim P(\mathbf{x})}{\mathbb{E}}\left[a_i^l\right] \quad \sigma_i^l=\sqrt{\underset{\mathbf{x} \sim P(\mathbf{x})}{\mathbb{E}}\left[\left(a_i^l-\mu_i^l\right)^2\right]}
aˉil=σilgil(ail−μil)μil=x∼P(x)E[ail]σil=x∼P(x)E[(ail−μil)2]
where a ˉ i l \bar{a}_i^l aˉil is normalized summed inputs to the i t h i^{t h} ith hidden unit in the l t h l^{t h} lth layer and g i g_i gi is a gain parameter scaling the normalized activation before the non-linear activation function.
实际中不会计算真正的 μ \mu μ和 σ \sigma σ,转而去估计一个batch里的 μ \mu μ和 σ \sigma σ,所以BN要求这个batchsize不能太小。然而,在一些在线学习任务以及超大分布模型中往往需要很小的batchsize。
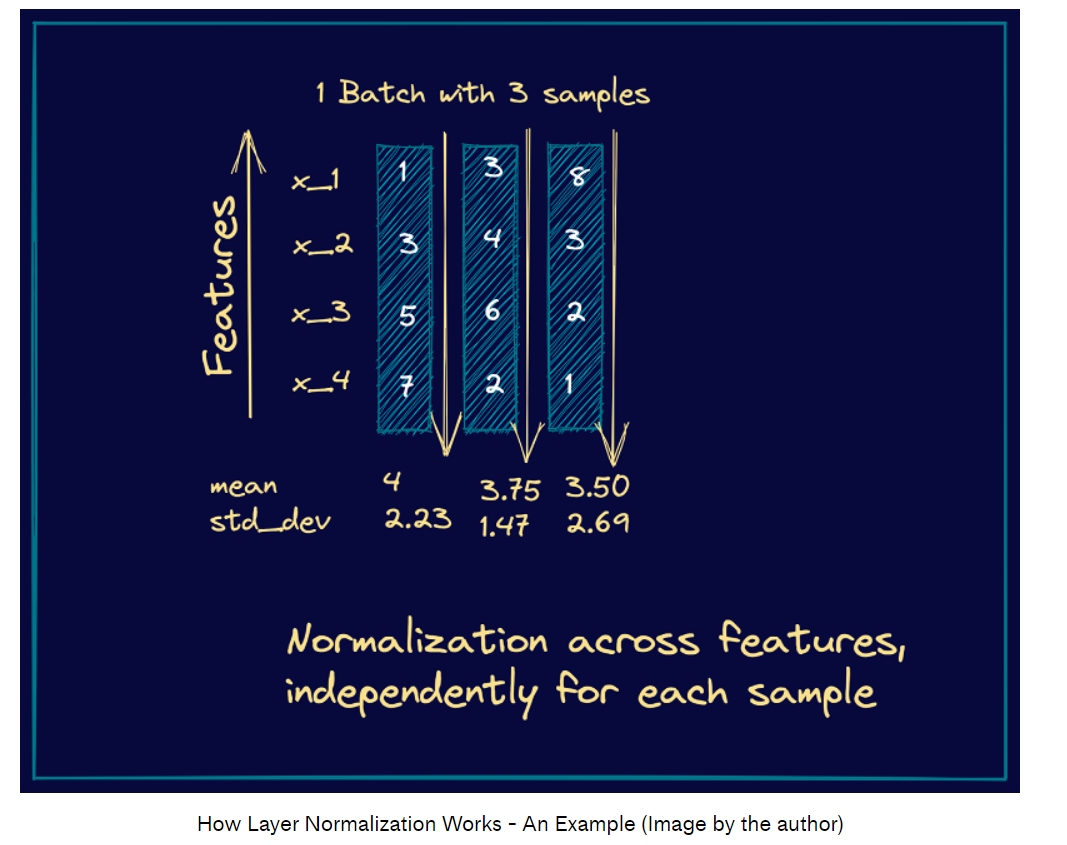
Layer Normalization
μ l = 1 H ∑ i = 1 H a i l σ l = 1 H ∑ i = 1 H ( a i l − μ l ) 2 \mu^l=\frac{1}{H} \sum_{i=1}^H a_i^l \quad \sigma^l=\sqrt{\frac{1}{H} \sum_{i=1}^H\left(a_i^l-\mu^l\right)^2} μl=H1i=1∑Hailσl=H1i=1∑H(ail−μl)2
H H H是一个隐藏层中的隐藏单元数量。在LN中,同一个层共享 μ \mu μ和 σ \sigma σ, but different training cases have different normalization terms. Unlike batch normalization, layer normalization does not impose any constraint on the size of a mini-batch and it can be used in the pure online regime with batch size 1.
In a standard RNN, the summed inputs in the recurrent layer are computed from the current input
x
t
\mathbf{x}^t
xt and previous vector of hidden states
h
t
−
1
\mathbf{h}^{t-1}
ht−1 which are computed as
a
t
=
W
h
h
h
t
−
1
+
W
x
h
x
t
\mathbf{a}^t=W_{h h} h^{t-1}+W_{x h} \mathbf{x}^t
at=Whhht−1+Wxhxt. The layer normalized recurrent layer re-centers and re-scales its activations using the extra normalization terms :
h
t
=
f
[
g
σ
t
⊙
(
a
t
−
μ
t
)
+
b
]
μ
t
=
1
H
∑
i
=
1
H
a
i
t
σ
t
=
1
H
∑
i
=
1
H
(
a
i
t
−
μ
t
)
2
\mathbf{h}^t=f\left[\frac{\mathbf{g}}{\sigma^t} \odot\left(\mathbf{a}^t-\mu^t\right)+\mathbf{b}\right] \quad \mu^t=\frac{1}{H} \sum_{i=1}^H a_i^t \quad \sigma^t=\sqrt{\frac{1}{H} \sum_{i=1}^H\left(a_i^t-\mu^t\right)^2}
ht=f[σtg⊙(at−μt)+b]μt=H1i=1∑Haitσt=H1i=1∑H(ait−μt)2
where W h h W_{h h} Whh is the recurrent hidden to hidden weights and W x h W_{x h} Wxh are the bottom up input to hidden weights. ⊙ \odot ⊙ is the element-wise multiplication between two vectors. b \mathbf{b} b and g \mathbf{g} g are defined as the bias and gain parameters of the same dimension as h t \mathbf{h}^t ht.
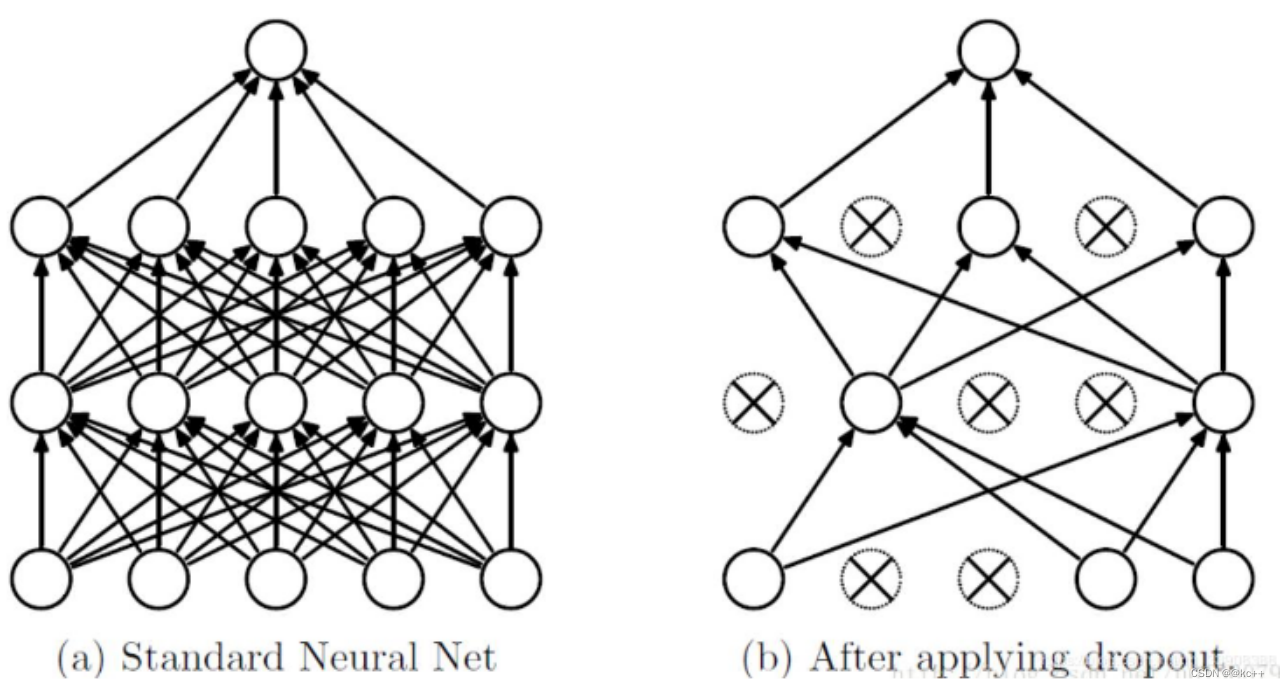
在标准RNN中存在梯度爆炸和消失问题,用了LN之后会更加稳定。
贴两个图便于理解:
视频讲解可以参考:What is Layer Normalization? | Deep Learning Fundamentals
代码实现
这边贴一个Restormer中的LN层的实现
首先定义两个函数用于reshape。4d到3d不需要参数,因为只需要把已有的两个维度合并;3d到4d需要参数,因为需要把一个维度分成两个维度
def to_3d(x):
return rearrange(x, 'b c h w -> b (h w) c')
def to_4d(x,h,w):
return rearrange(x, 'b (h w) c -> b c h w',h=h,w=w)
定义一个没有bias的LN层,weight是可学习的参数,所以用 n n . P a r a m e t e r nn.Parameter nn.Parameter包装
# 没有bias的LayerNorm层
class BiasFree_LayerNorm(nn.Module):
def __init__(self, normalized_shape):
super(BiasFree_LayerNorm, self).__init__()
if isinstance(normalized_shape, numbers.Integral):
normalized_shape = (normalized_shape,)
normalized_shape = torch.Size(normalized_shape)
assert len(normalized_shape) == 1
self.weight = nn.Parameter(torch.ones(normalized_shape))
self.normalized_shape = normalized_shape
def forward(self, x):
#x的维度(batch_size, height x width, channels)
#sigma的维度(batch_size, height x width, 1)
sigma = x.var(-1, keepdim=True, unbiased=False)
return x / torch.sqrt(sigma+1e-5) * self.weight
定义一个有bias的LN层,同样的,weight和bias都是可学习的参数
class WithBias_LayerNorm(nn.Module):
def __init__(self, normalized_shape):
super(WithBias_LayerNorm, self).__init__()
#如果输入的normalized_shape是个整数,则化为元组
if isinstance(normalized_shape, numbers.Integral):
normalized_shape = (normalized_shape,)
normalized_shape = torch.Size(normalized_shape)
assert len(normalized_shape) == 1
self.weight = nn.Parameter(torch.ones(normalized_shape))
#比上面多定义一个bias
self.bias = nn.Parameter(torch.zeros(normalized_shape))
self.normalized_shape = normalized_shape
def forward(self, x):
mu = x.mean(-1, keepdim=True)
sigma = x.var(-1, keepdim=True, unbiased=False)
return (x - mu) / torch.sqrt(sigma+1e-5) * self.weight + self.bias#这边加了bias
把上面的函数包装起来,定义一个统一的层规范化函数
class LayerNorm(nn.Module):
def __init__(self, dim, LayerNorm_type):
super(LayerNorm, self).__init__()
if LayerNorm_type =='BiasFree':
self.body = BiasFree_LayerNorm(dim)
else:
self.body = WithBias_LayerNorm(dim)
def forward(self, x):
h, w = x.shape[-2:]
return to_4d(self.body(to_3d(x)), h, w)