论文信息
题目:OrienterNet: visual localization in 2D public maps with neural matching
作者:Paul-Edouard Sarlin, Daniel DeTone
项目地址:github.com/facebookresearch/OrienterNet
来源:CVPR
时间:2023
Abstract
人类可以使用简单的 2D 地图在 3D 环境中定位自己。不同的是,视觉定位算法主要依赖于复杂的 3D 点云,随着时间的推移,这些点云的构建、存储和维护成本高昂。
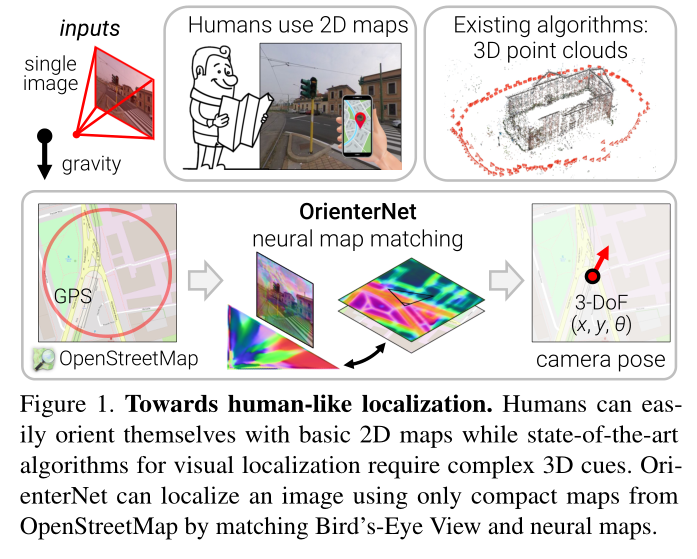
我们通过引入 OrienterNet 来弥补这一差距,这是第一个深度神经网络,可以使用与人类使用的相同的 2D 语义图以亚米级精度定位图像。 OrienterNet 通过将神经鸟瞰图与 OpenStreetMap 中开放且全局可用的地图进行匹配来估计查询图像的位置和方向,使任何人都可以在任何此类地图可用的地方进行本地化。 OrienterNet 仅受相机姿势监督,但学习以端到端的方式与各种地图元素进行语义匹配。为了实现这一目标,我们引入了一个大型众包图像数据集,其中包含从汽车、自行车和行人的不同角度拍摄的 12 个城市的图像。
Introduction
3D 地图的存储成本也很高,因为它们比基本 2D 地图大几个数量级。这会阻碍在设备上执行本地化,并且通常需要昂贵的云基础设施。
本文介绍了第一种方法,该方法可以在人类使用的相同地图的情况下以亚米级精度定位单个图像和图像序列。这些平面地图仅编码少数重要物体的位置和粗略二维形状,而不编码它们的外观或高度。此类地图非常紧凑,尺寸比 3D 地图小 104 倍,因此可以存储在移动设备上并用于大区域内的设备上定位。我们通过 OpenStreetMap (OSM) [46] 展示了这些功能,这是一个开放访问且由社区维护的世界地图,使任何人都可以免费在任何地方进行本地化。该解决方案不需要随着时间的推移构建和维护成本高昂的 3D 地图,也不需要收集潜在敏感的地图数据。
具体来说,我们的算法估计 2D 地图中校准图像的 3-DoF 位姿,即位置和航向。该估计是概率性的,因此可以与先前不准确的 GPS 融合,或者与多摄像机装备或图像序列的多个视图融合。由此产生的解决方案比消费级 GPS 传感器更准确,并且基于特征匹配达到更接近传统管道的精度水平 [57, 60]。
我们的方法称为 OrienterNet,是一种深度神经网络,它模仿人类在查看地图时在环境中定位自己的方式,即将度量二维地图与从视觉观察中得出的心理地图进行匹配 [37,45]。 OrienterNet 学习以端到端的方式比较视觉和语义数据,仅受相机姿势的监督。通过利用 OSM 公开的高度多样性的语义类(从道路和建筑物到长凳和垃圾桶等物体),可以产生准确的姿势估计。
OrienterNet 速度快且可解释性强。我们训练了一个单一模型,该模型可以很好地推广到以前未见过的城市以及各种相机从不同角度拍摄的图像,例如汽车、自行车或头戴式、专业或消费类相机。这些功能的关键是通过 Mapillary 平台从世界各地的城市众包的图像的新的大规模训练数据集。
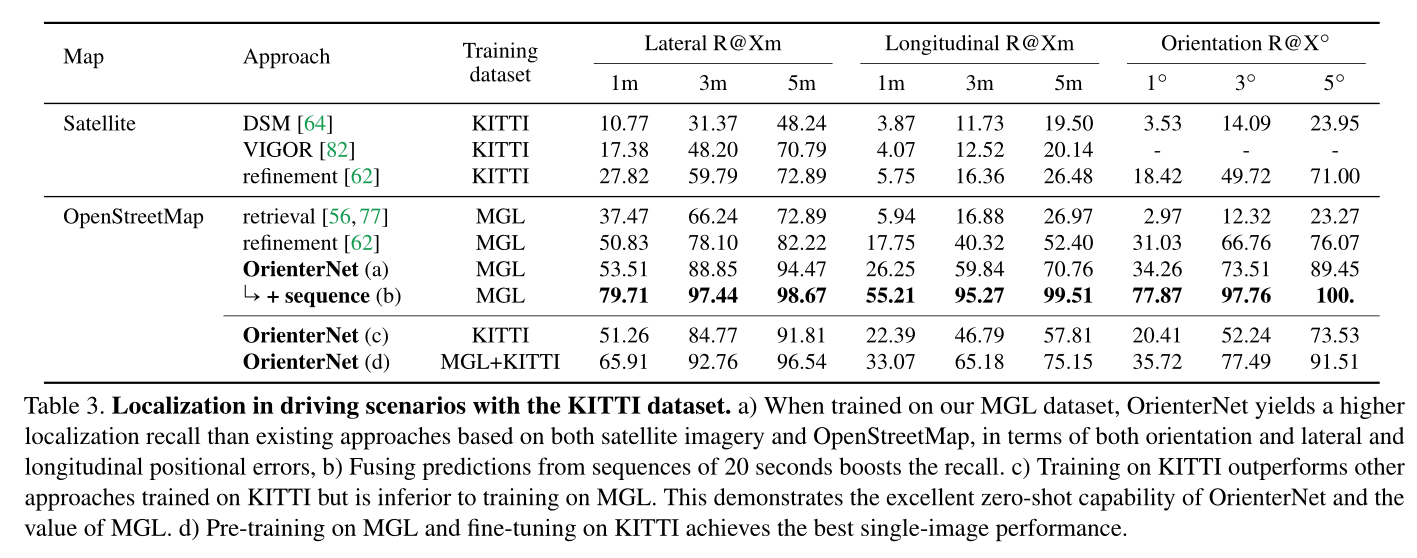
我们的实验表明,OrienterNet 大大优于之前在驾驶场景中的定位方面的工作,并且在应用于 Aria 眼镜记录的数据时,大大提高了其在 AR 用例中的准确性。我们相信,我们的方法是朝着 AR 和机器人技术的连续、大规模、设备上本地化迈出的重要一步。
Related work
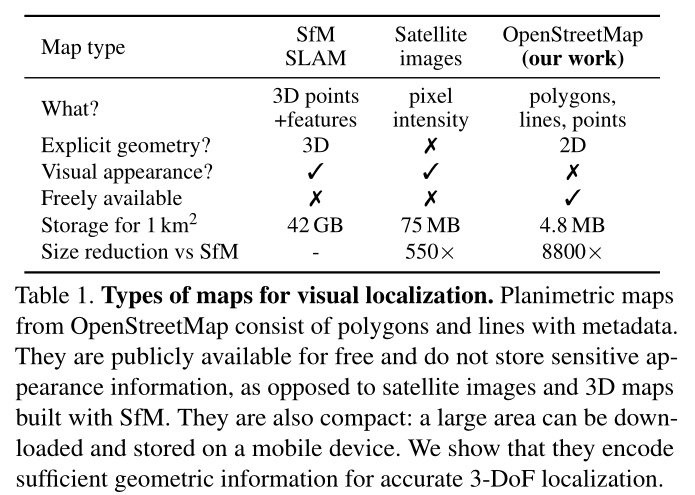
我们可以使用多种类型的地图表示来定位世界上的图像:根据地面图像构建的 3D 地图、2D 俯视卫星图像或来自 OpenStreetMap 的更简单的平面地图。表 1 总结了它们的差异
Mapping with ground-level images
使用地面图像绘制地图是迄今为止最常见的方法。通过图像检索进行地点识别可在给定一组参考图像的情况下提供粗略定位 [4,23,32,72]。为了估计厘米级精度的 6-DoF 姿势,基于特征匹配的算法需要 3D 地图 [31,39,57,60]。它们由稀疏点云组成,通常使用 Structure-fromMotion (SfM) [2,22,36,43,61,67] 从跨多个视图匹配的稀疏点构建 [9,38,53]。新查询图像的姿态由几何解算器 [10,26,33] 根据与地图的对应关系进行估计。虽然一些工作 [70, 79] 利用额外的传感器输入,例如粗略的 GPS 位置、重力方向和相机高度,但最近的定位系统非常准确且强大,这主要归功于学习的功能 [18, 19, 51, 58, 73 ]。
然而,这涉及具有大量内存占用的 3D 地图,因为它们存储具有高维视觉描述符的密集 3D 点云。个人数据泄露到地图中的风险也很高。
Localization with overhead imagery
通过假设世界大部分是平面并且重力方向通常由无处不在的机载惯性传感器给出,使用俯视图像进行定位可以将问题简化为估计 3-DoF 位姿。大量工作集中于跨视图地面到卫星定位。虽然卫星图像比 3D 地图更紧凑,但捕捉卫星图像的成本很高,通常不是免费的,而且以高分辨率存储仍然很繁重。大多数方法仅通过补丁检索来估计粗略位置[30,63,65,82]。此外,估计方向的工作并不准确[62,64,77],产生超过几米的误差。
Planimetric maps
平面地图丢弃任何外观和高度信息,仅保留地图元素的 2D 位置、形状和类型。 OSM 是此类地图的流行平台,因为它是免费的并且在全球范围内可用。给定一个查询区域,其开放 API 将地理特征列表公开为带有元数据的多边形,其中包括具有一千多种不同对象类型的细粒度语义信息。然而,过去的工作为单个或几个语义类设计检测器,缺乏鲁棒性。其中包括建筑轮廓 [5,6,15–17,74,75]、道路轮廓 [21,54] 或交叉口 [41,47,78]、车道标记 [25, 48]、街道设施 [14, 76] ,甚至文本[27]。
最近的工作通过使用端到端深度网络从地图图块计算更丰富的表示来利用更多线索[56, 80]。当他们检索具有全局图像描述符的地图图块时,他们仅估计粗略位置。在室内场景中,平面图是现有作品中常用的平面地图[28,42]。它们需要室外空间通常无法提供的高度或能见度信息。通过将射影几何的约束与端到端学习的表达能力相结合,利用 OSM 中提供的所有语义类,我们的方法在准确性和鲁棒性方面比之前的所有工作有了显着的进步。
Localizing single images in 2D maps
Problem formulation:在典型的定位场景中,我们的目标是估计图像在世界中的绝对 6-DoF 位姿。在现实的假设下,我们将这个问题简化为估计由位置 ( x , y ) ∈ R 2 (x, y) \in \mathbb{R}^2 (x,y)∈R2 和航向角 θ ∈ ( − π , π ] θ \in (−π, π] θ∈(−π,π] 组成的 3-DoF 位姿 ξ = ( x , y , θ ) \xi = (x, y, θ) ξ=(x,y,θ)。
这里我们考虑一个地心坐标系,其 x-y-z 轴对应于东西向垂直方向。
首先,我们可以很容易地假设知道重力的方向,这是人类从内耳自然拥有的信息,并且可以通过大多数设备中嵌入的惯性单元来估计。我们还观察到,我们的世界大多是平面的,室外空间中人和物体的运动大多局限于二维表面。在局部 SLAM 重建中,相机的精确高度始终可以估计为到地面的距离。
Input:我们考虑具有已知针孔相机校准的图像 I I I。图像通过根据已知重力计算出的单应性进行校正,使其横滚和倾斜为零——然后其主轴是水平的。我们还得到了先验 ξ p r i o r \xi _{prior} ξprior 的粗略位置。这可能是一个嘈杂的 GPS 位置或之前的定位估计,并且可能偏离 20 米以上。对于城市峡谷等多路径环境中的消费级传感器来说,这是一个现实的假设。
地图数据是从 OSM 查询的,作为以 ξ p r i o r \xi _{prior} ξprior 为中心的正方形区域,其大小取决于先验的噪声程度。数据由多边形、线和点的集合组成,每个多边形、线和点都具有给定的语义类,并且其坐标在同一局部参考系中给出。
Overview-Figure 2:OrienterNet 由三个模块组成:
1)图像 CNN 从图像中提取语义特征,并通过推断场景的 3D 结构将其提升为正交鸟瞰图 (BEV) 表示
T
T
T。
2)OSM图由map-CNN编码为嵌入语义和几何信息的神经图
F
F
F。
3) 我们通过将 BEV 与地图进行详尽匹配来估计相机姿态
ξ
\xi
ξ 上的概率分布。
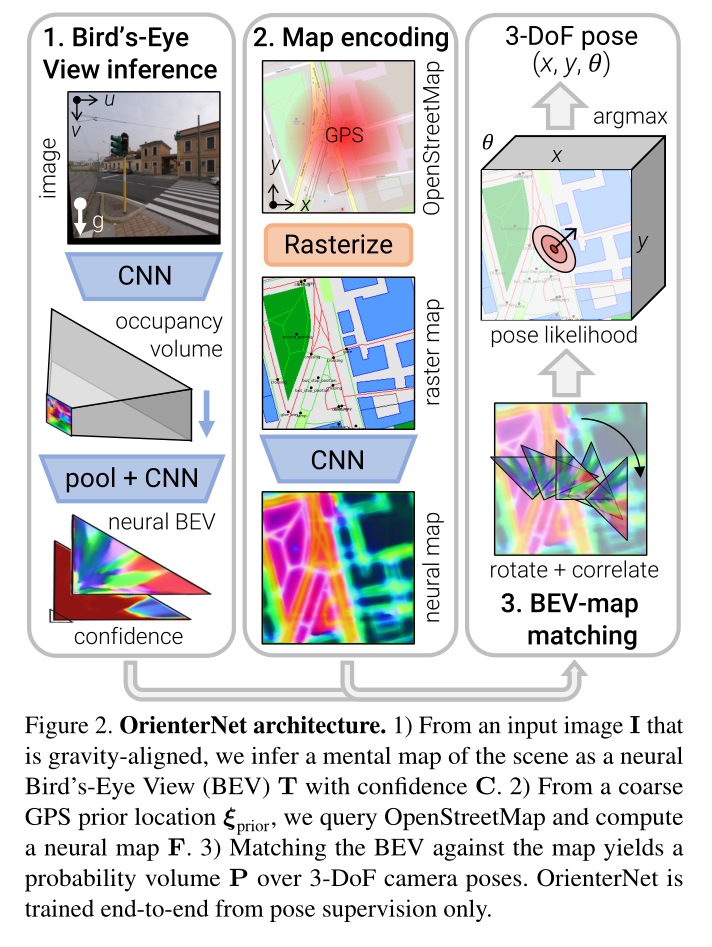
Neural Bird’s-Eye View inference
Overview:从单个图像 I I I 中,我们推断出 BEV 表示 T ∈ R L × D × N T ∈ \mathbb{R}^{L×D×N} T∈RL×D×N,分布在与相机平截头体对齐的 L × D L×D L×D 网格上,并由 N 维特征组成。网格上的每个特征都被分配一个置信度,产生一个矩阵 C ∈ [ 0 , 1 ] L × D C ∈ [0, 1]^{L×D} C∈[0,1]L×D。这种 BEV 类似于人类在俯视图中进行自我定位时从环境中推断出的心理地图 [37, 45]。
图像和地图之间的跨模态匹配需要从视觉线索中提取语义信息。事实证明,单目深度估计可以依赖于语义线索 [3],并且这两项任务具有有益的协同作用 [29, 34]。因此,我们依靠单目推理将语义特征提升到 BEV 空间。
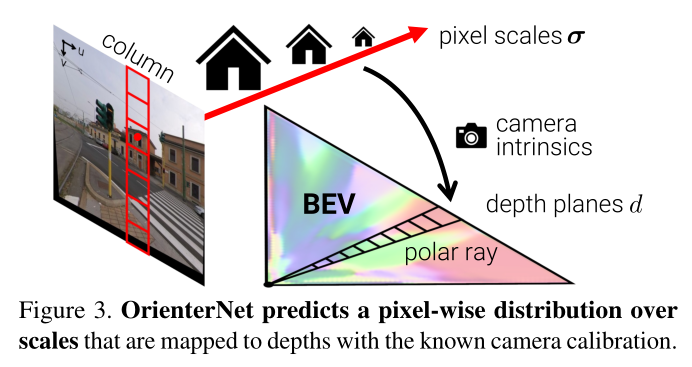
继过去处理语义任务的工作[49,52,55]之后,我们分两步获得神经 BEV:
i)我们通过将图像列映射到极射线将图像特征转移到极坐标表示,
ii)我们对极坐标网格重新采样成笛卡尔网格(图 3)。
Polar representation:CNN
Φ
i
m
a
g
e
Φ_{image}
Φimage 首先从图像中提取
U
×
V
U×V
U×V 特征图
X
∈
R
U
×
V
×
N
X ∈ \mathbb{R}^{U×V ×N}
X∈RU×V×N。我们考虑在相机前面以规则间隔 Δ 采样的 D 个深度平面,即具有值
i
⋅
Δ
∣
i
∈
1...
D
{i · Δ|i ∈ {1 ... D}}
i⋅Δ∣i∈1...D。由于图像是重力对齐的,因此 X 中的每个 U 列都对应于 3D 空间中的一个垂直平面。因此,我们将每一列映射到
U
×
D
U×D
U×D 极坐标表示中的一条射线
X
^
∈
R
U
×
D
×
N
\hat{X} ∈ \mathbb{R}^{U×D×N}
X^∈RU×D×N 。我们通过预测每个极像元
(
u
,
d
)
(u, d)
(u,d) 对应图像列中像素的概率分布
α
u
,
d
∈
[
0
,
1
]
V
α_{u,d} ∈ [0, 1]^V
αu,d∈[0,1]V 来实现此目的:

我们不是直接回归深度上的分布
α
α
α,而是回归独立于相机校准参数的尺度上的分布
S
S
S。比例尺是 3D 世界和图像 [3] 中物体大小的比率,等于焦距 f 和深度的比率。我们考虑一组
S
S
S 对数分布尺度

该公式相当于从极射线到图像列的注意机制,其分数从线性深度重新采样到对数尺度。当比例不明确且难以推断时,视觉特征沿着射线分布在多个深度上,但仍然为定位良好的地图点提供几何约束[35]。针对驾驶场景量身定制的作品 [49,52,55] 考虑具有相同模型的相机捕获的数据集并直接回归
α
α
α。因此,他们将焦距编码在网络权重中,学习从对象尺度到深度的映射。不同的是,通过假设焦距是系统的输入,我们的公式可以在测试时推广到任意相机。
BEV grid:我们通过沿横向从U极射线到以相同间隔Δ间隔的L列的线性插值,将极特征映射到尺寸为 L × D L×D L×D的笛卡尔网格。然后,生成的特征网格由小型 CNN Φ B E V Φ_{BEV} ΦBEV 处理,输出神经 BEV T T T 和置信度 C C C
Neural map encoding
我们将平面图编码为结合了几何和语义的 W × H W ×H W×H 神经图 F ∈ R W × H × N F ∈ \mathbb{R}^{W ×H×N} F∈RW×H×N。
Map data:OpenStreetMap 元素根据其语义类定义为多边形区域、多段线或单点。区域的示例包括建筑物占地面积、草地、停车场;线包括道路或人行道中心线、建筑物轮廓;点包括树木、公交车站、商店等。附录 B.1 列出了所有类别。这些元素的准确定位提供了定位所需的几何约束,而它们丰富的语义多样性有助于消除不同姿势的歧义。
Preprocessing:我们首先将区域、线和点栅格化为具有固定地面采样距离 Δ 的 3 通道图像,例如50 厘米/像素。这种表示比以前的作品 [56, 80] 中执行的人类可读 OSM 切片的简单光栅化更丰富、更准确。
Encoding:我们将每个类与学习的 N 维嵌入相关联,产生 W × H × 3 N W×H×3N W×H×3N 特征图。然后通过 CNN Φ m a p Φ_{map} Φmap 将其编码到神经图 F 中,提取对定位有用的几何特征。 F 没有被归一化,因为我们让 Φ m a p Φ_{map} Φmap 调整它的范数作为匹配中的重要性权重。图 4 中的示例表明,F 通常看起来像一个距离场,我们可以在其中清楚地识别建筑物的拐角或相邻边界等独特特征。
Φ m a p Φ_{map} Φmap 还预测地图每个单元格的一元位置先验 Ω ∈ R W × H Ω ∈ \mathbb{R}^{W ×H} Ω∈RW×H。该分数反映了在每个位置拍摄图像的可能性。我们很少期望在河流或建筑物等地方拍摄图像。
Pose estimation by template matching
Probality volume:我们估计相机姿势 ξ \xi ξ 上的离散概率分布。这是可以解释的,并充分体现了估计的不确定性。因此,在不明确的场景中,分布是多模态的。图 4 显示了各种示例。这使得将姿态估计与 GPS 等附加传感器融合起来变得很容易。计算这个体积很容易处理,因为姿势空间已减少到 3 维。它被离散化为每个地图位置和定期采样的 K 个旋转。
这会产生一个
W
×
H
×
K
W ×H×K
W×H×K 概率体积 P,使得
P
(
ξ
∣
I
,
m
a
p
,
ξ
p
r
i
o
r
)
=
P
[
ξ
]
P (\xi|I, map, \xi_{prior}) = P[\xi]
P(ξ∣I,map,ξprior)=P[ξ]。它是图像映射匹配项
M
M
M 和位置先验
Ω
Ω
Ω 的组合:
P
=
s
o
f
t
m
a
x
(
M
+
Ω
)
P = softmax (M + Ω)
P=softmax(M+Ω)
M 和 Ω 代表图像条件和图像无关的非归一化对数分数。 Ω 沿旋转维度传播,softmax 标准化概率分布。
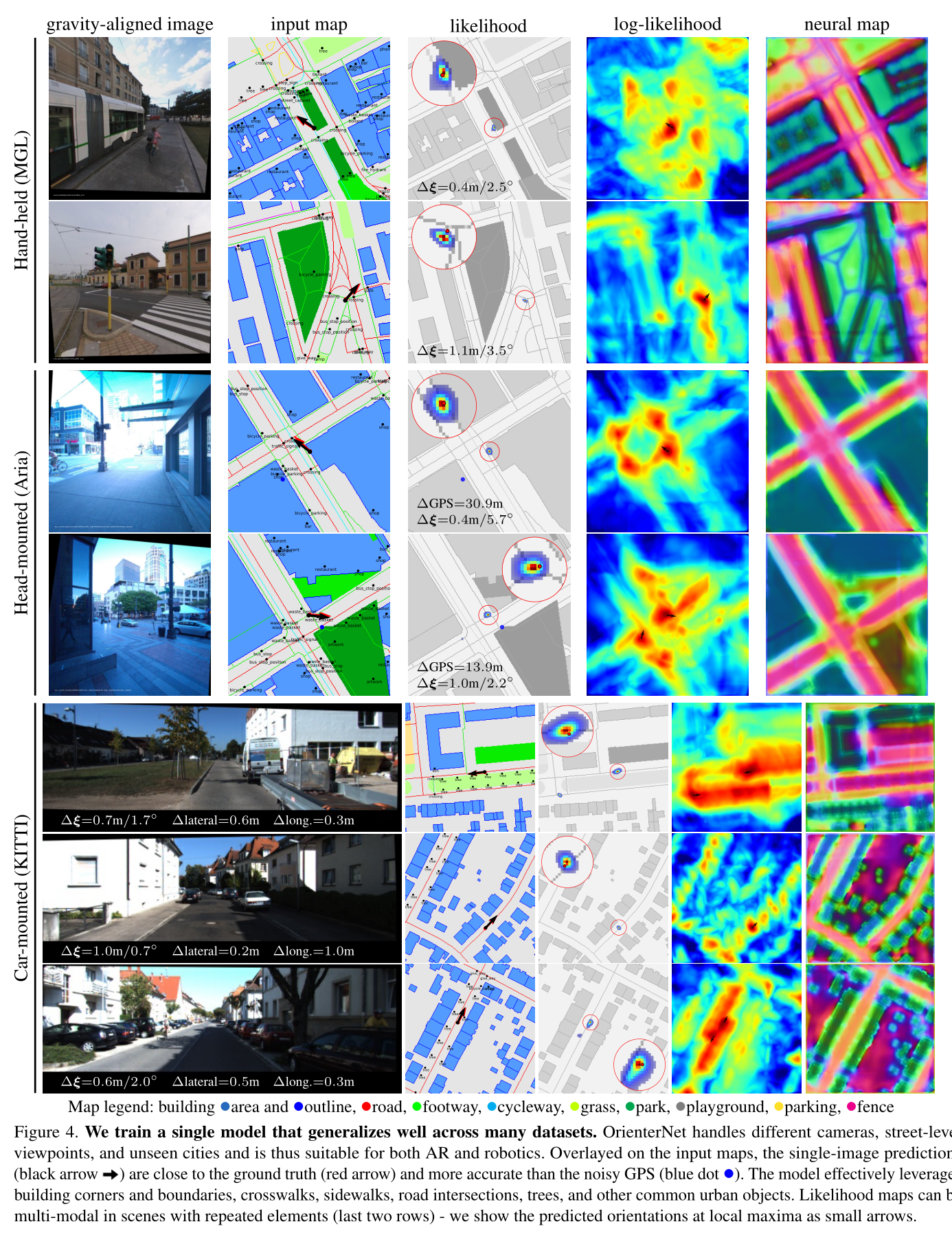
Image-map matching: 彻底匹配神经映射
F
F
F 和 BEV
T
T
T 产生分数体积
M
M
M。每个元素都是通过将
F
F
F 与相应姿势变换后的
T
T
T 相关联来计算的:
Pose inference:我们通过最大似然估计单个姿势:
ξ
∗
=
a
r
g
m
a
x
ξ
P
(
ξ
∣
I
,
m
a
p
,
ξ
p
r
i
o
r
)
\xi^* = argmax_{\xi} P (\xi|I, map, \xi_{prior})
ξ∗=argmaxξP(ξ∣I,map,ξprior)。当分布主要是单峰时,我们可以获得不确定性的度量作为 P 围绕
ξ
∗
\xi^*
ξ∗ 的协方差[7]。
Sequence and muti-camera localization
在表现出很少的独特语义元素或重复模式的位置中,单图像定位是不明确的。当已知多个视图的相对姿势时,可以通过在多个视图上积累额外的线索来消除此类挑战的歧义。这些视图可以是来自 VI SLAM 的具有姿势的图像序列,也可以是来自校准的多摄像机装置的同步视图。
图 5 显示了此类困难场景的示例,该场景通过随时间累积的预测来消除歧义。不同的框架将姿势限制在不同的方向上,例如交叉路口之前和之后。融合较长的序列可获得更高的准确度(图 6)。
让我们将
ξ
i
\xi_i
ξi 表示为视图 i 的未知绝对位姿,将
ξ
^
i
,
j
\hat{\xi}_{i,j}
ξ^i,j 表示为从视图 j 到 i 的已知相对位姿。对于任意参考视图 i,我们将所有单视图预测的联合似然表示为
Experiments
Conclusion
OrienterNet 是第一个能够在人类使用的相同 2D 平面地图中以亚米级精度定位图像的深度神经网络。 OrienterNet 通过将输入地图与从视觉观察中得出的心理地图进行匹配来模仿人类在环境中定位自己的方式。与机器迄今为止所依赖的大型且昂贵的 3D 地图相比,此类 2D 地图极其紧凑,因此最终能够在大型环境中实现设备上定位。 OrienterNet 基于 OpenStreetMap 的全球免费地图,任何人都可以使用它来定位世界任何地方。
我们提供了一个大型的众包训练数据集,帮助模型在驾驶和 AR 数据集上很好地泛化。 OrienterNet 显着改进了现有的 3-DoF 定位方法,大幅提升了现有技术水平。这为部署节能机器人和 AR 设备开辟了令人兴奋的前景,这些机器人和 AR 设备无需昂贵的云基础设施即可知道自己的位置。