近年来,激光SLAM系统凭借其更加快速且准确获取更丰富信息的优势,迅速风靡测绘领域,让原本耗时耗力的外业测量变得更加高效。手持激光扫描仪作为基于激光SLAM技术衍生的众多产品之一,相较于架站式激光扫描仪更加轻巧便利,可实现随走随测,无需换站。
虽然手持激光扫描仪提高了外业效率,但由于受到激光SLAM技术难点的限制,不同的设备在面对狭小或超大场景时的效果也是差强人意,点云分层、建筑倾斜甚至是点云解算失败等问题时有发生。
为顺应当下数据多元化的发展趋势和对数据质量不断提高的要求,大势智慧探索出业内数据后处理的新方向,即由离散点云数据逐渐转向三维实景Mesh数据。
对此,智影 R100应运而生,业内首款移动式实景三维Mesh建模的SLAM激光扫描仪。产品硬件集成了激光雷达、高精度惯导和全景相机等多种传感器,软件配备大势智慧独创的数据解算算法,支持一键生成彩色点云、构建实景三维Mesh模型,完美契合复杂场景的快速数据采集与建模需求。

高效采集 稳定解算
高精度点云满足生产需求
告别繁琐的开关机指示和设备开始采集前长时间的静置,智影 R100手机APP操控端操作简单,仅需25s即可完成设备开机+IMU初始化等采集前的准备工作,相比市面上的手持激光雷达,开机启动时间缩短50%。
设备启动展示
狭长楼道、建筑转角和超大场景的数据采集解算效率和成果精度,是用户评判一款SLAM三维激光扫描仪性能优劣的重要指标。智影 R100相较于市面上的手持激光扫描仪拥有更高的采集自由度,在面对错综复杂的场景时只需备好电池、规划好行进路线,即可来一场说采就采的“旅行”。
建筑转角处不用减速慢行
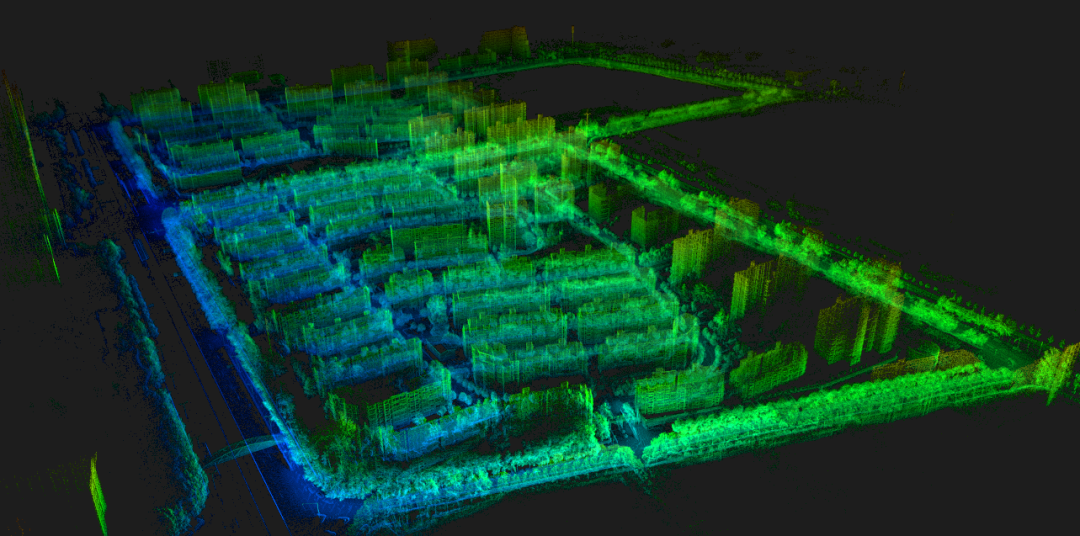
75min连续采集0.4km²超大场景数据
智影 R100所配置的内业解算软件—智影模形,是大势智慧自主研发的点云解算后处理软件。软件追求极致的工程优化,支撑高效的数据解算,地图解算时间仅为数据采集的一半。
智影 R100数据解算基于大势智慧自研的激光SLAM算法和点云地图优化算法,能够保证点云地图长时间构建不分层,维护地图的全局一致性,可轻松应对狭窄巷道、地下空间以及密集建筑等场景的数据解算。考虑到精度验证的严谨性,我们用法如FocusS350架站扫描仪同步进行精度比对,最后得出智影 R100生成的点云相对精度达到2cm,符合生产要求。

注:点云是描述实际三维空间的点的集合,其质量的评定标准就是相对平面位置中误差,相对平面位置中误差可以评价激光雷达点云数据平面位置的内部变形程度,利用点云上的检查点数据进行评定,计算公式为:
点云数据展示
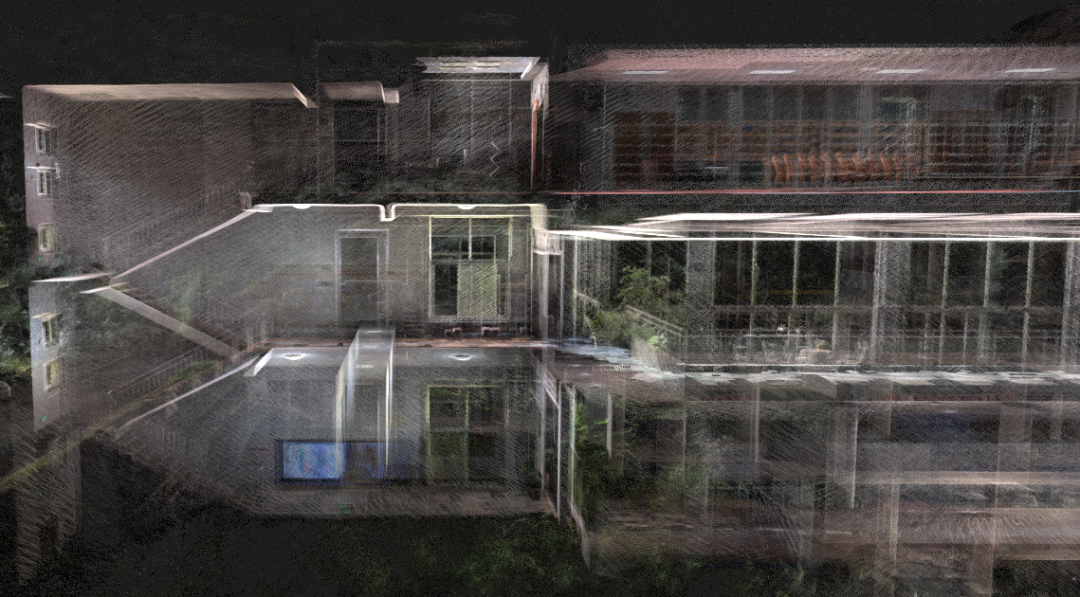
三层室内空间数据
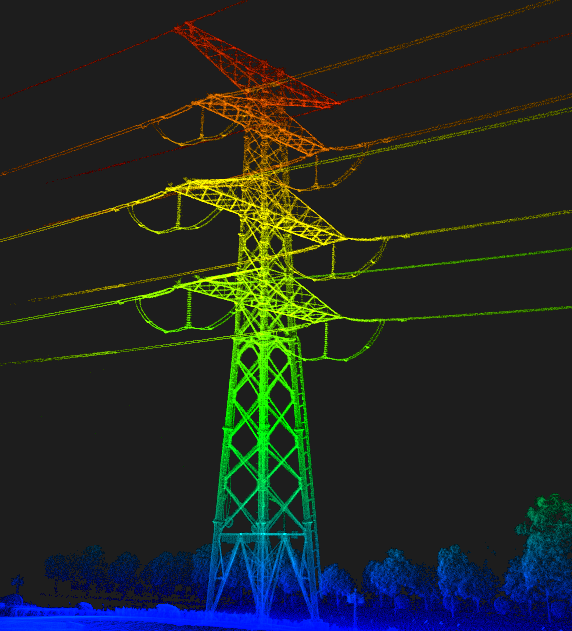
电力线杆塔
点云生成实景三维Mesh模型
一步到位
点云是描述目标物体表面的一个数据集,是海量点的集合。在对点云进行后处理时,常面临着由于数据量过大导致的浏览卡顿、点云细节放大后稀疏等问题,给测图等需要精细化操作的生产场景带来很多不便。将点云处理成Mesh模型,既能够减小项目数据量,又保留建筑原有的细节,无论是在展示还是应用方面都是不二之选。
目前市面上很多软件可以搭配使用,从而实现点云生成Mesh模型。然而,由于数据格式不统一,有时需要频繁切换多个软件,增加了项目的时间成本。并且所生成的模型都是无法附上真实纹理的白模,大大降低了模型的实用性。
基于大势智慧持续八年迭代优化的算法,智影 R100集点云解算、点云优化和点云建模于一体,不仅能高效解算点云数据,更可直接从原始点云一键自动生成具备真实纹理的三维Mesh模型,且模型几何能够精确表达场景结构,图像纹理可真实反映场景色彩,极大地提升了用户的建模效率和质量。

室外建筑物点云及三维模型展示
地下停车场三维模型展示
不止于模型
更有多场景应用
智影 R100所具备的点云一键生成实景三维Mesh模型的优势,能够极大提升建模效率,而其高精度的模型成果也为不同行业领域提供了更加精准、高效的应用选择。
联动大势智慧自主研发的修模软件——模方(ModelFun)进行局部Mesh结构修饰和纹理优化,进一步提升模型质量。
模型修复编辑
智影 R100,业内首款移动式实景三维Mesh建模的SLAM激光扫描仪,具备卓越的高效采集与稳定解算能力,一键输出高精度点云成果,更可由点云一步生成实景三维Mesh模型,轻松应对各种复杂场景的生产应用需求。大势智慧热切期待与行业伙伴携手合作,共同探索智影 R100在更多场景的应用潜力。
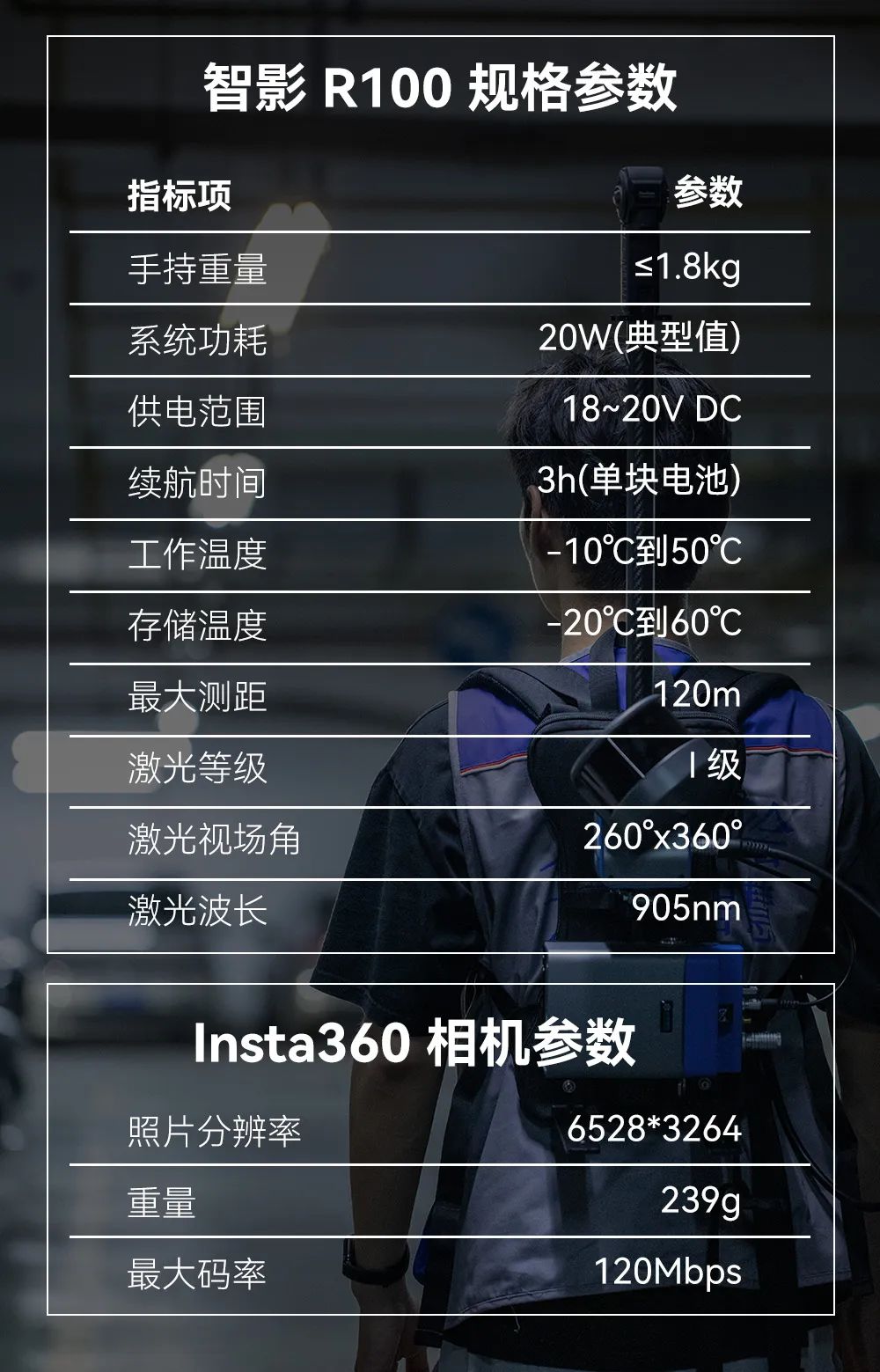
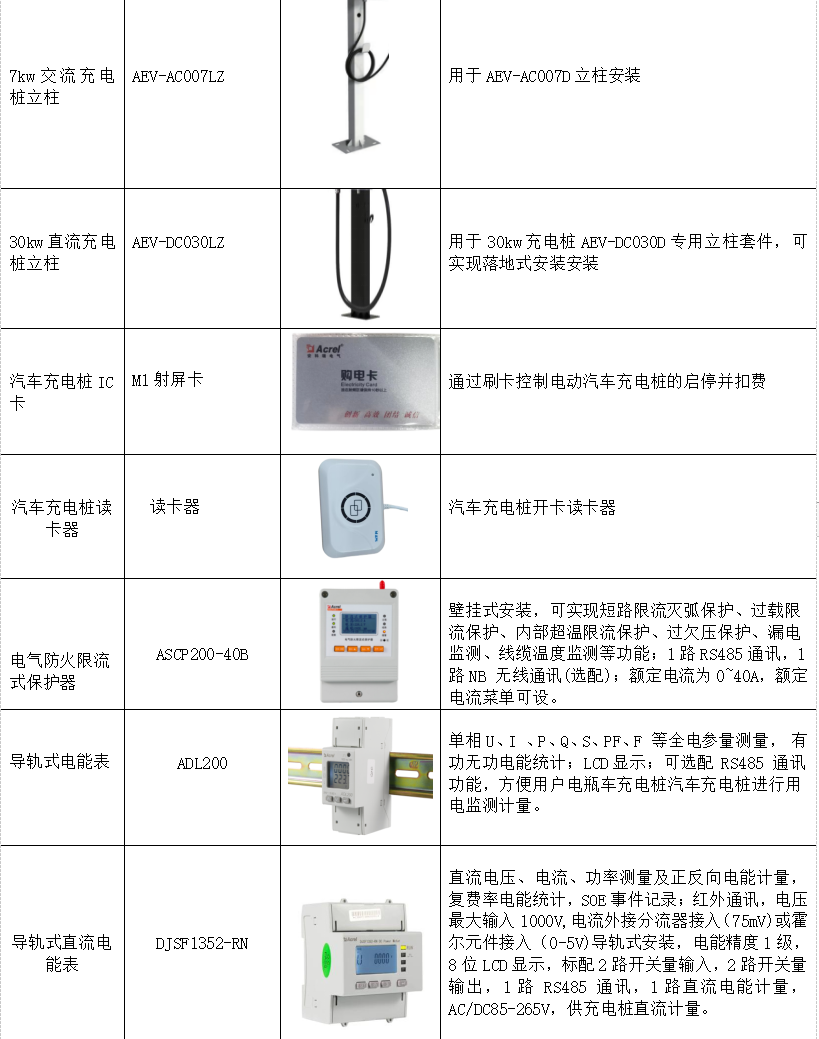
详细设备参数