💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
L波段雷达接收到的信号研究主要涉及到信号的接收和去噪两个方面。
在信号接收方面,L波段雷达接收到的信号通常是经过多次反射和散射后的复杂信号。为了提取出目标的信息,需要对接收到的信号进行解调和解调。解调是将接收到的信号转换为基带信号,以便进行后续的信号处理。解调的方法可以根据具体的雷达系统而定,常见的方法包括相干解调和非相干解调。
在信号去噪方面,由于雷达接收到的信号中常常包含有噪声,这些噪声会干扰目标信号的提取和识别。因此,去噪是L波段雷达信号研究中的一个重要问题。常见的去噪方法包括滤波和降噪算法。滤波是通过滤波器将噪声频带内的信号滤除,以提高信号的信噪比。降噪算法则是通过数学模型和信号处理算法对信号进行处理,以减小噪声的影响。
总之,L波段雷达接收到的信号研究主要关注信号的接收和去噪两个方面,旨在提高雷达系统的性能和目标信号的提取能力。
输入信号(1个时间段) 2:输入信号连续和周期性(多个时间段) 3:输入信号离散和周期性 4:增加AWGN噪声的输入波 5:傅里叶达明输入波 6:傅里叶变换的幅度谱 7:在频域中将fft乘以cos(fc t)获得的波 8:频域中滤波后得到的正弦波的fft图' 9:滤波后得到的波的平方和图(I^2 + Q^2) 10:滤波对数后得到的波的平方和的对数图(I^2 + Q^2)
然后我绘制了图形 5,6,7,8,9,10 用于添加高斯白噪声、随机噪声 在图 8 中,我创建了一个低通滤波器来过滤前一波
1:使波成为60 MHz的正弦函数。 2:根据所需的时间间隔划分波并使其周期性。 3:对最终输入波进行采样 4:在输入信号中加入高斯白噪声。 5:采样信号的傅里叶变换。 6:我们将fft后获得的波与频域中的cos(fc t)和sin(fc t)相乘。 7:接下来,我们正在设计一个FIR滤波器,以通过我们在获得傅里叶变换采样正弦波的正弦和余弦乘积时获得的波。 8:最后我们绘制滤波后获得的波的平方和(I^2 + Q^2')
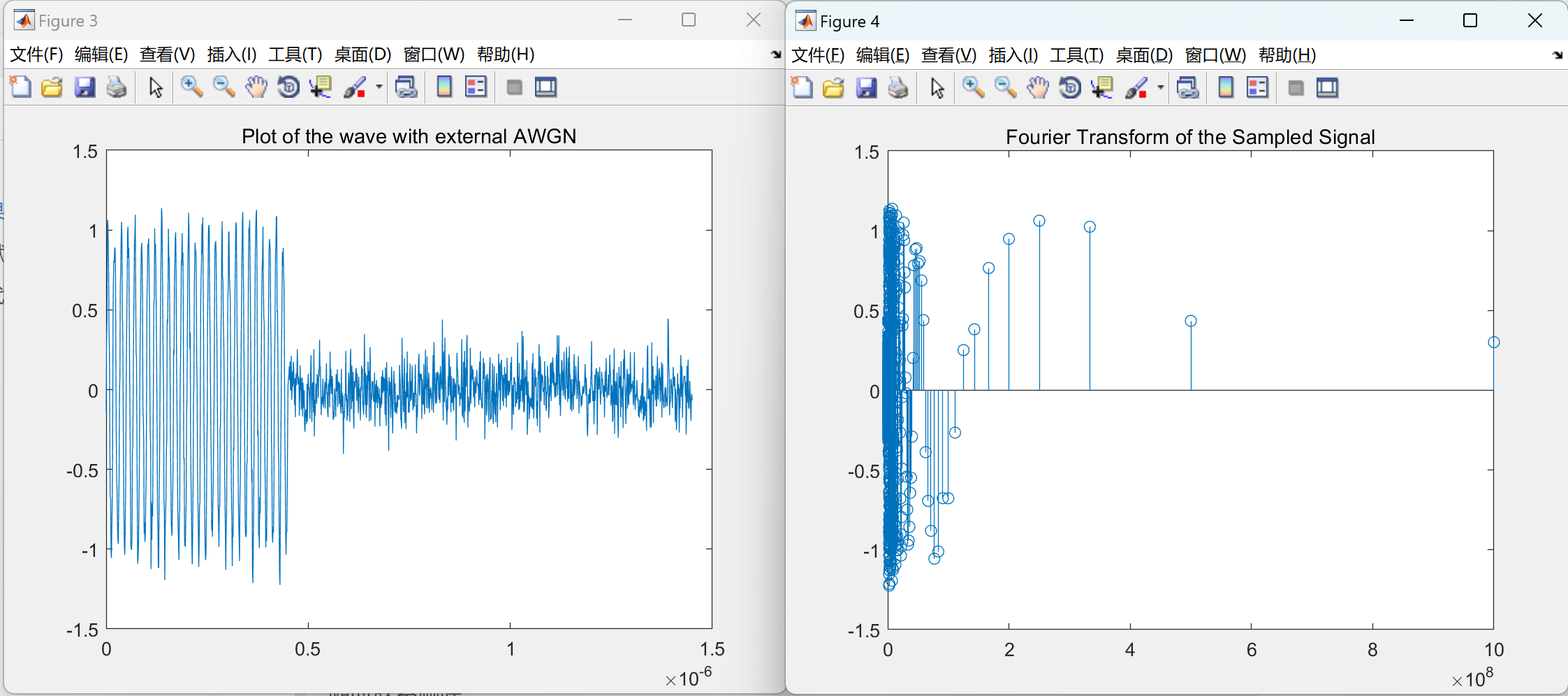
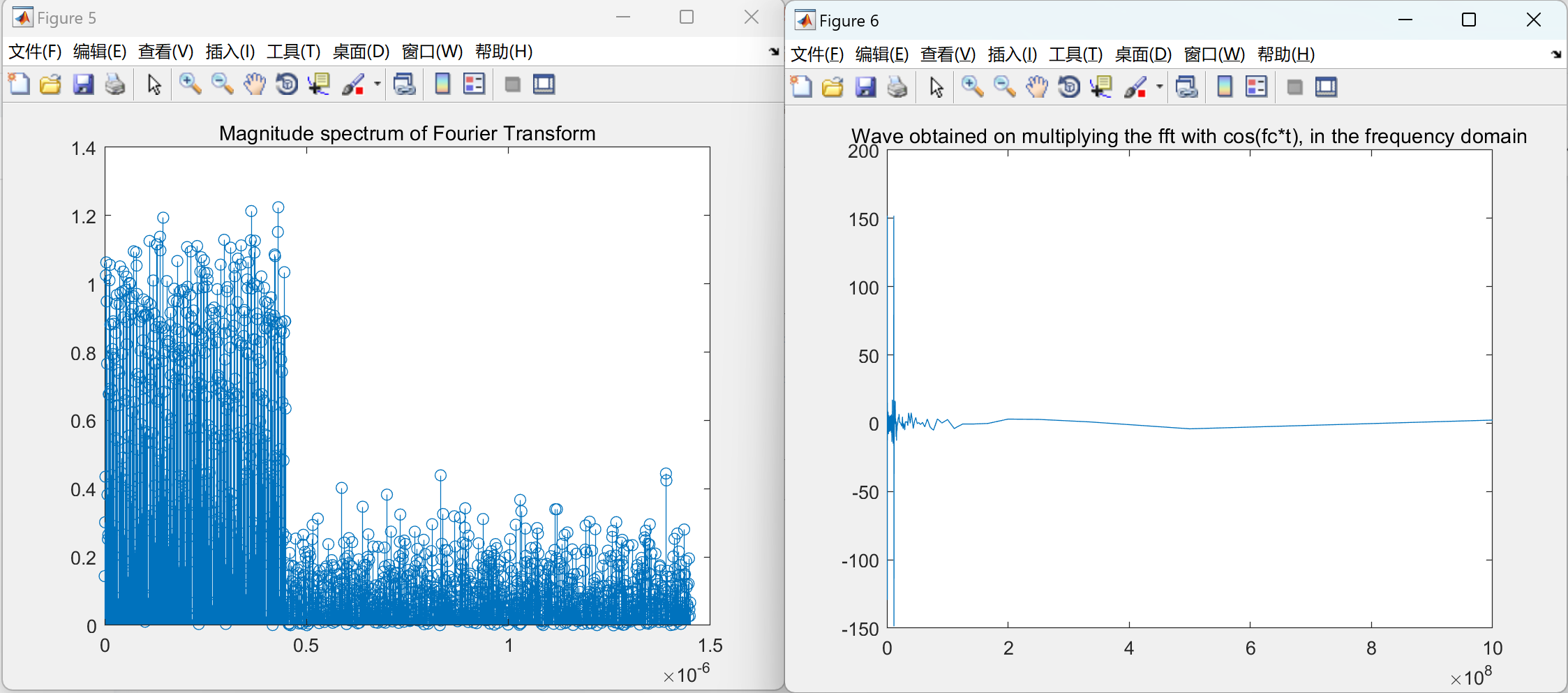
📚2 运行结果



部分代码:
N0 = awgn(pfx2,10,'measured');
plot(x2,N0);
title(' Plot of the wave with external AWGN ');
figure;
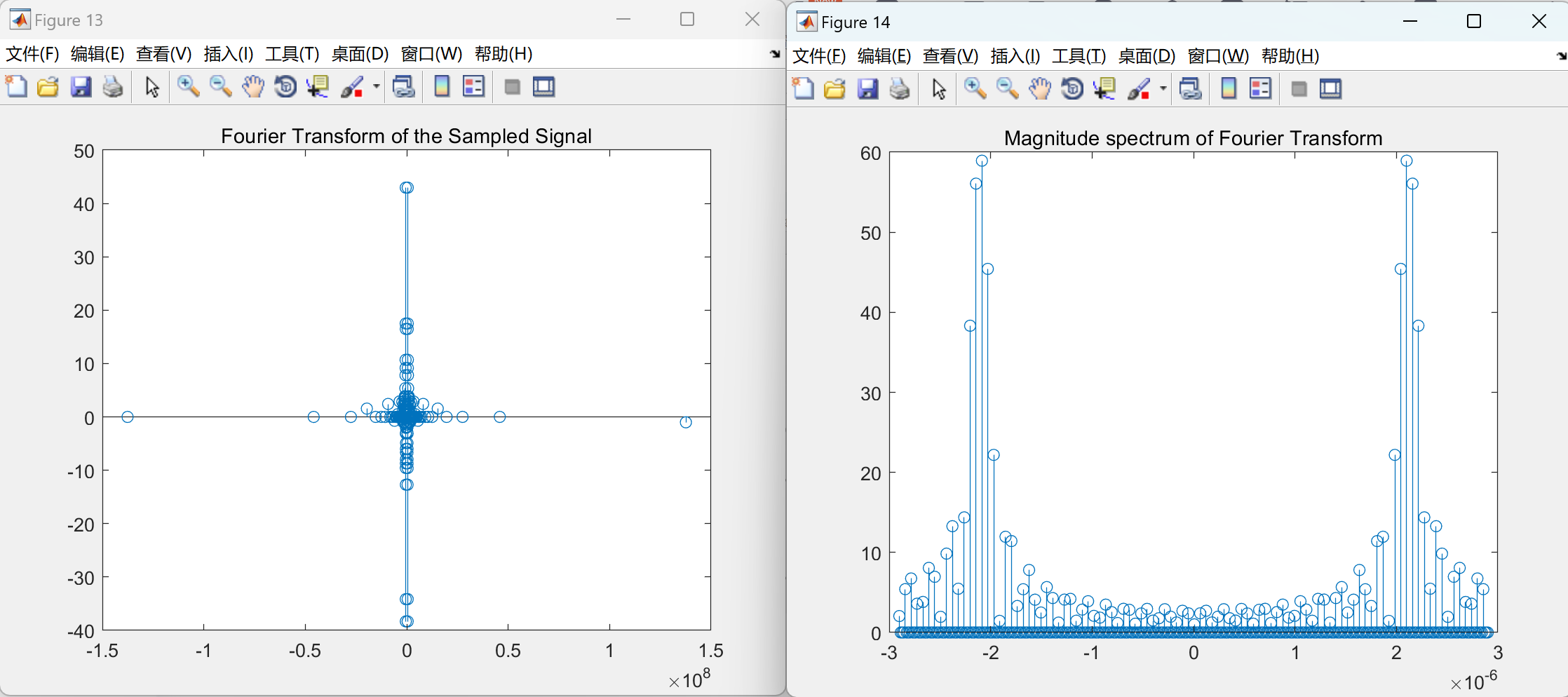
F = fft(N0);
stem(1./x2,N0);
title('Fourier Transform of the Sampled Signal');
figure;
stem(x2,abs(N0));
title('Magnitude spectrum of Fourier Transform');
figure;
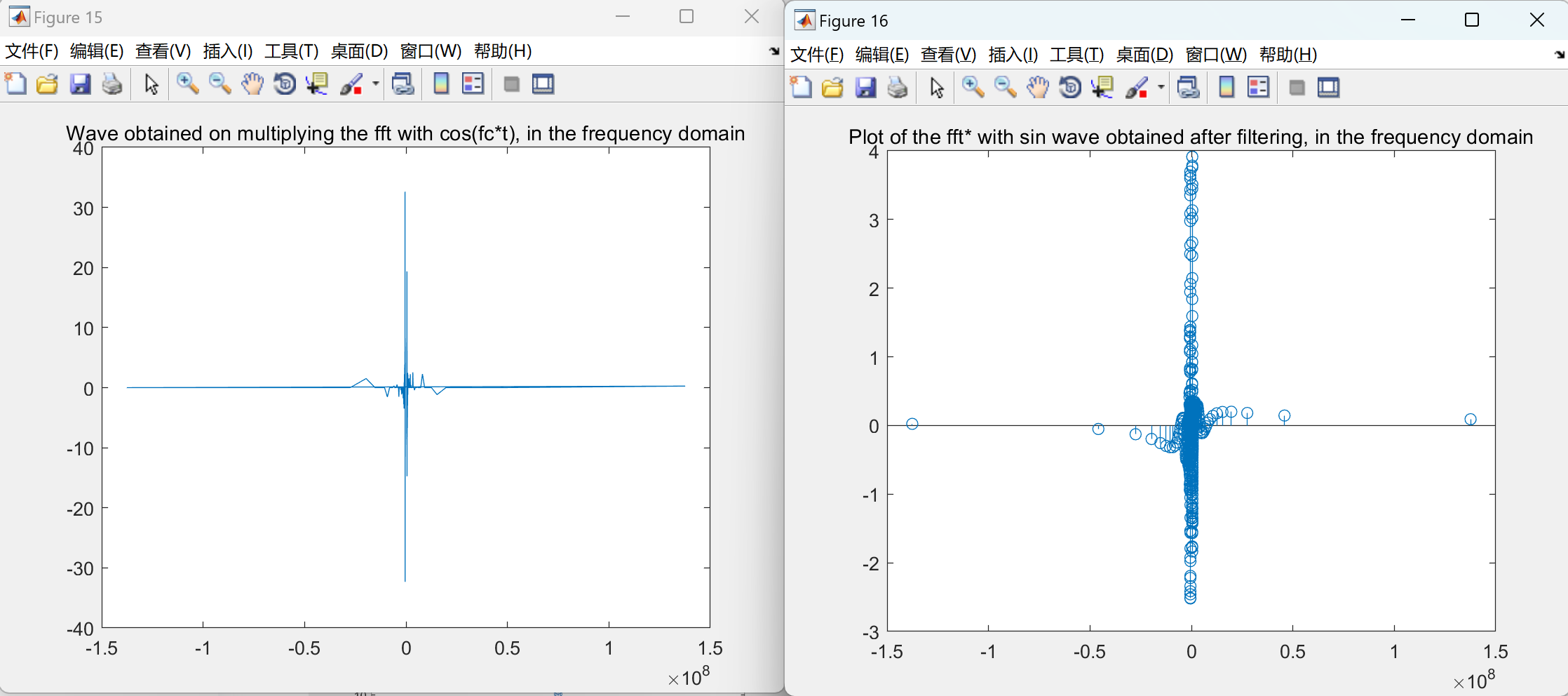
fc = 40.*(10^(6));
I0 = F .* cos((2.*(pi).*fc).*x2);
plot(1./x2,I0);
title('Wave obtained on multiplying the fft with cos(fc*t), in the frequency domain');
figure;
Q0 = F .* sin((2.*(pi).*fc).*x2);
plot(1./x2,Q0);
title('Wave obtained on multiplying the fft with sin(fc*t), in the frequency domain');
%In the following steps we are designing an FIR Filter, through which we
%are going to pass the waves we obtain on getting the sine and cosine
%products of the Fourier Transformed Sampled Sine wave
d = fdesign.lowpass('Fp,Fst,Ap,Ast',0.1,0.15,1,60);
% We are setting the Passband Frequency at 10 MHz and the Stopband
% frequency at 15 MHz and thus, the input arguments of 0.1 and 0.15 in
% lowpass object
designmethods(d);
f = design(d, 'ellip');
%fvtool(f) ;
Q = filter(f,Q0);
I = filter(f,I0);
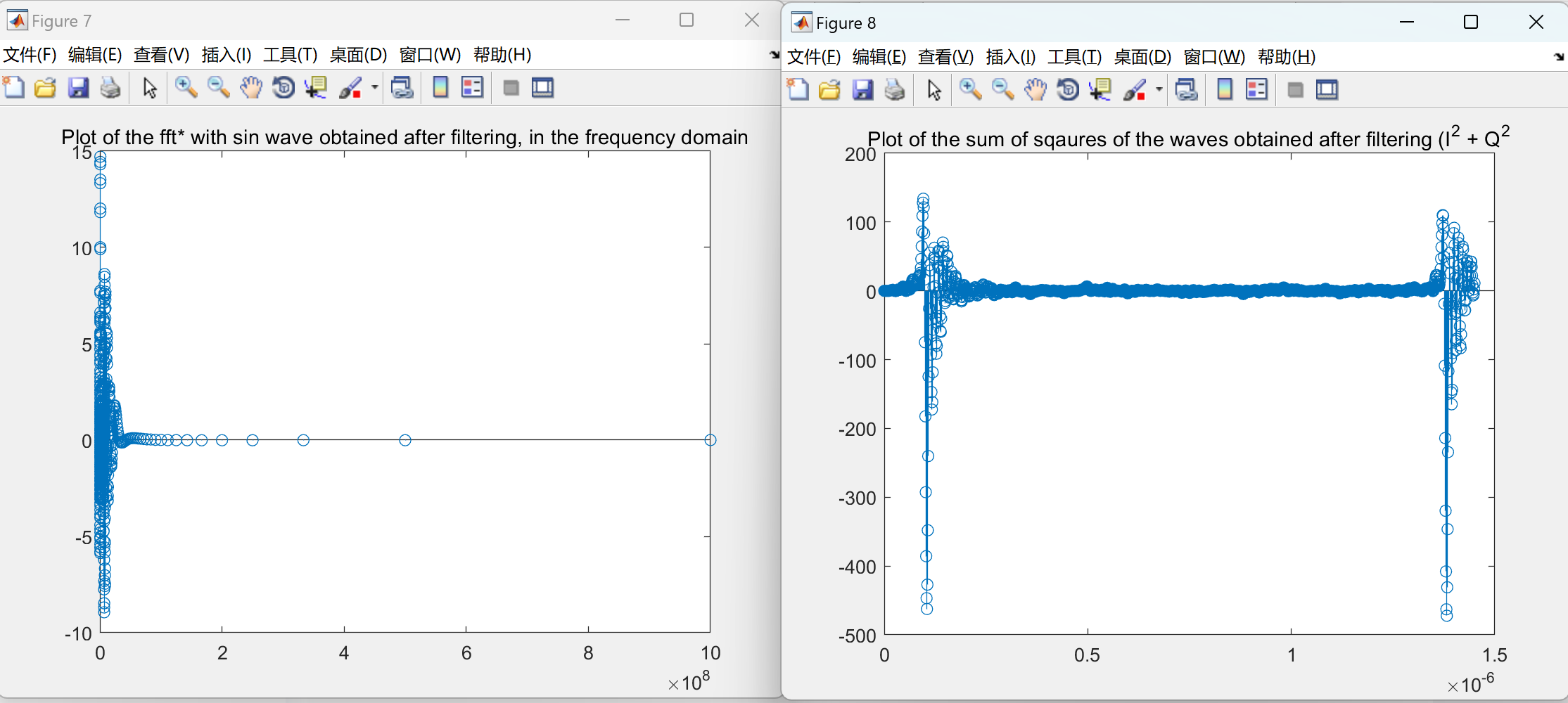
stem(1./x2,I);
title('Plot of the fft* with sin wave obtained after filtering, in the frequency domain');
figure;
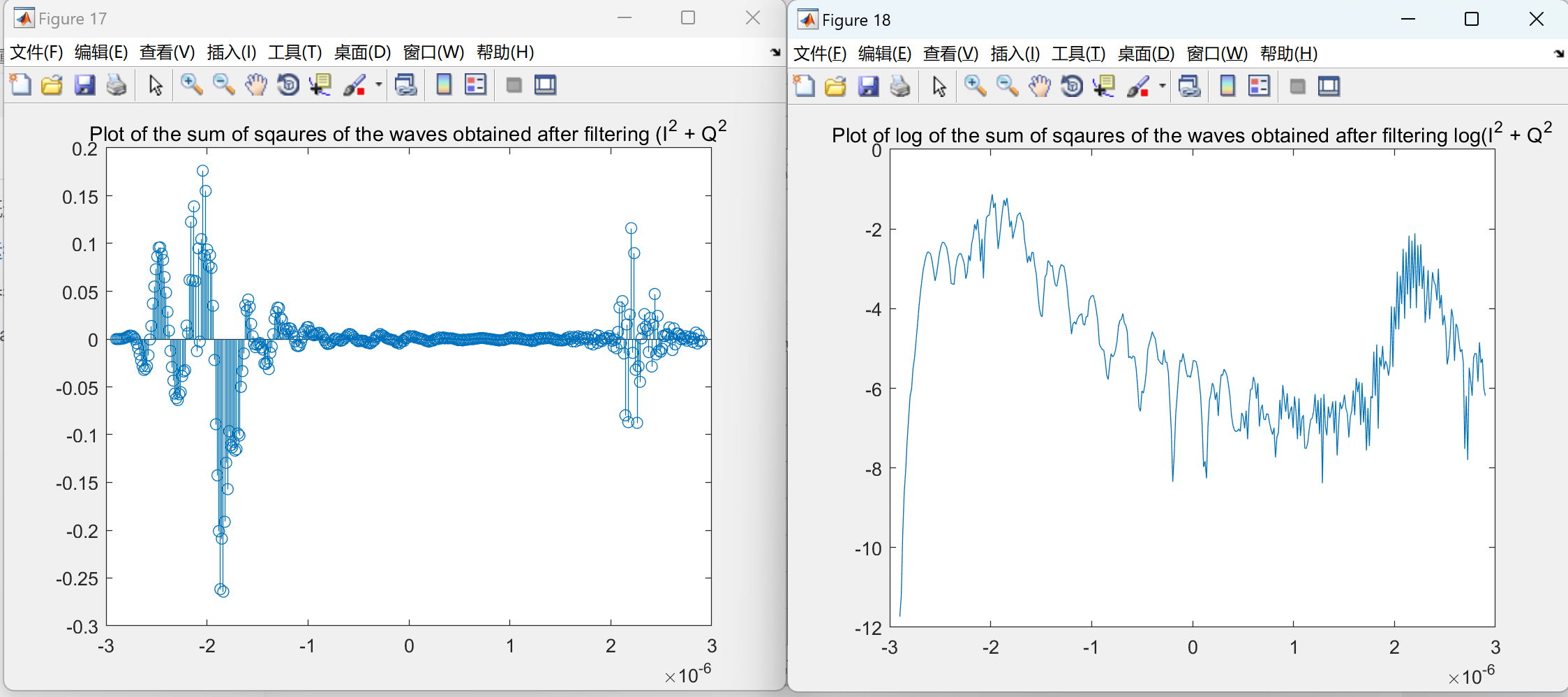
K = ((I).^2 + (Q).^2);
K1 = log(K);
stem(x2,K);
title('Plot of the sum of sqaures of the waves obtained after filtering (I^2 + Q^2');
figure;
plot(x2,K1);
title('Plot of log of the sum of sqaures of the waves obtained after filtering log(I^2 + Q^2');
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张爱萍.信号干扰对L波段雷达信号接收的影响及对策[J].甘肃农业, 2016(6):2.DOI:CNKI:SUN:GSNY.0.2016-06-014.
[2]黄祖辉,戴丽琼,颜涛.L波段测风雷达接收机功能及信号流程[J].科研, 2015, 000(002):00093-00094.