TF坐标在ROS中是一个非常重要的概念,因为机器人在做日常操作任务的时候,对于其所在位置和朝向是需要时刻知道的,而机器人是由很多节点组成的协同任务,对于每个部件,我们需要知道它的位姿(位置和朝向),这使得坐标系就成为了一个很重要的问题。
TF的功能就是能够换算出该点在其他坐标系下的坐标。比如,以机器人为例,定义两个坐标系,一个坐标系以机器人移动平台的中心为原点,称为base_link参考系,另一个坐标系以激光雷达的中心为原点,称为base_laser参考系,当然这个命名是需要唯一。利用TF坐标转换,将base_laser参考系与base_link参考系重合,这样就可以准确得知机器人自身位置,便于继续进行下一步的操作。
1、术语概述
那么在介绍坐标系的时候,会经常看到位置、朝向,位姿等术语,先介绍下在三维世界中的几个术语:
位置:是一个三维的向量(x,y,z),用于表示相对于原点沿着各个轴的方向分别移动了多远。
朝向:也是一个三维向量(roll,pitch,yaw),用于表示分别绕各个轴转动了多少。
位姿:将位置和朝向放在一起,一对(位置,朝向)表示一个位姿。这种具有六维(三维位移,三维旋转)的位姿成为6D位姿。
给定两者之间的位姿,我们可以变换两个坐标系下的数据,这个变换通常是一些矩阵乘法。有的位姿是动态的,有的位置是固定的,比如说,固定在机器人身上的激光雷达,就是相对固定的;而机械手的位姿就是不断变化的,因为需要移动,旋转等和做一些抓取动作。
为了管理这些坐标系和变换,就设计了这个tf(Transform的缩写)包来实现,使用的是分布式的方式,用ROS话题来共享变换的数据。任何节点可以发布某些变换的当前信息,并且任何节点都可以订阅变换的数据,从不同的发布源得到机器人各部件之间的所有变换关系。
2、tf坐标系
对于一个强大系统来说,tf会比较的复杂,出错的可能性较大,所以就出现很多关于tf相关的检查和调试工具,帮助你理解正在发生的实情,我们接下来看下有哪些可视化的工具可供使用。
2.1、view_frames
我们先启动海龟示例,对于前面安装过的可以忽略,也可以使用 sudo apt install ros-melodic-turtle-tf 进行安装,对于ros的安装,推荐大家可以看下前面介绍的一篇文章:Ubuntu18.04版本安装ROS及出现错误的处理方法
启动海龟
roslaunch turtle_tf turtle_tf_demo.launch启动键盘操作
rosrun turtlesim turtle_teleop_key然后再开一个终端运行命令:rosrun tf view_frames
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
Listening to /tf for 5.0 seconds
Done Listening
dot - graphviz version 2.40.1 (20161225.0304)Detected dot version 2.40
frames.pdf generated
这里生成了一个坐标系的pdf文件frames.pdf,在后面看到的frame也都表示为坐标系的意思。
2.2、rqt_tf_tree
对于上面这个view_frames命令,运行后保存的是当前坐标系,不过这样的保存是离线的,不能实时反映变化的坐标关系。
我们换一个命令:rqt_tf_tree,可以显示tf坐标系的树结构
rosrun rqt_tf_tree rqt_tf_tree运行上面命令将会弹出可视化界面,如下图:
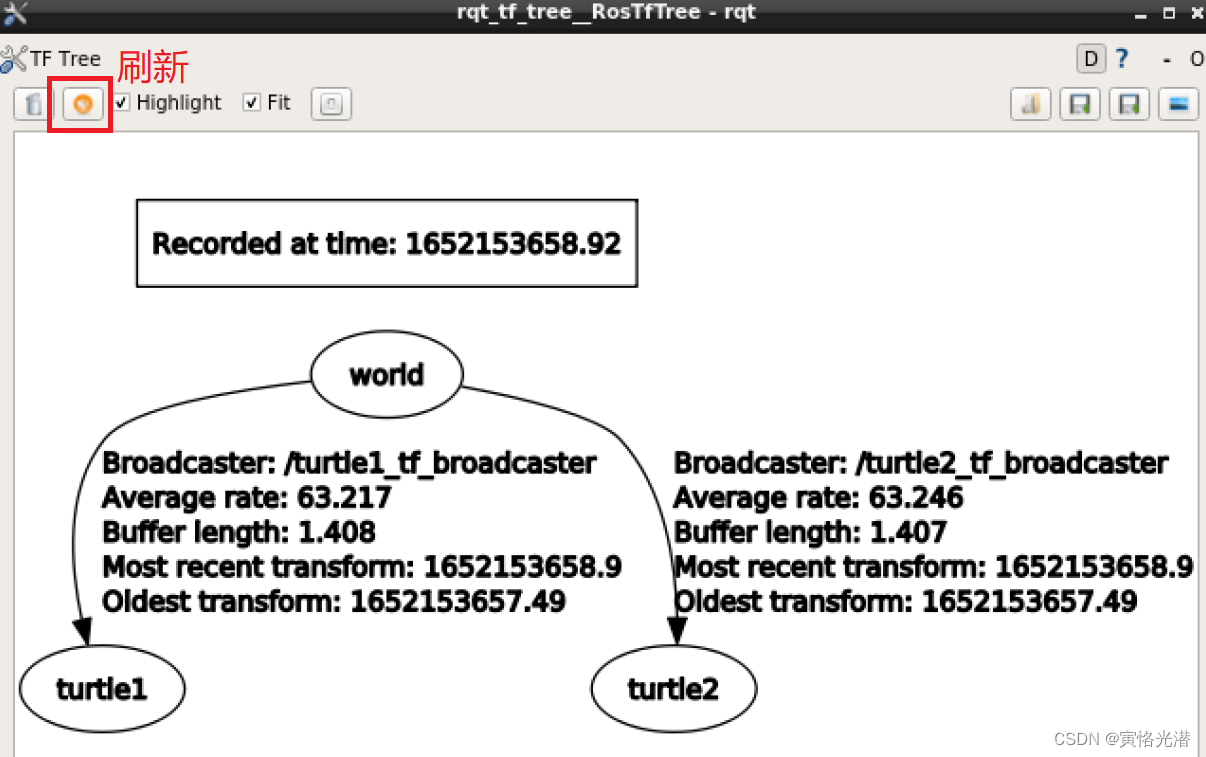
可以看到,显示了录制时间,两个海龟对应的广播(发布)节点,平均速率、缓冲大小,最近和最旧的转换时间,还可以高亮显示,鼠标放在节点上面,相关节点将显示不同颜色。
我们可以操作海龟,然后点击左上角的刷新,就会看到速率等都发生了变化,这样看起来就比较直观。如下图:

TF建立的树状结构的坐标系,在整个坐标系是没有闭环的,也就是说每个坐标系,只能有一个父坐标系,但可以有多个子坐标系。
2.3、tf_echo
命令格式:rosrun tf tf_echo <source_frame> <target_frame>
显示的信息是从source_frame到target_frame的旋转平移变换。
查看两只海龟参考系之间的关系
rosrun tf tf_echo turtle1 turtle2At time 1652155224.053
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
At time 1652155225.061
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
At time 1652155226.053
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
2.4、static_transform_publisher
两个坐标系之间的静态坐标变换,这两个坐标系不发生相对位置变化。比如说,无人车上的激光雷达与IMU惯性测量模块,这两者基本是固定的,所以可以使用static_transform_publisher来发布这两者的坐标变换。
命令格式如下:
第一种命令格式:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms第二种命令格式:
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms上面的两种格式,需要设置坐标的偏移和旋转参数
偏移参数:都使用相对于x y z三轴的坐标位移。
旋转参数:其中第一种命令格式使用以弧度为单位的 yaw pitch roll 三个角度(yaw是围绕x轴旋转的偏航角,pitch是围绕y轴旋转的俯仰角,roll是围绕z轴旋转的翻滚角)
第二种命令格式使用四元数表达旋转角度。
period_in_ms发布频率以毫秒为单位,一般100ms也就是0.1秒比较合适。
在launch中使用方法示例如下:
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1 100" />
</launch>2.5、roswtf
roswtf是一个插件,分析你当前的tf配置并试图找出常见问题。
比如输入命令,本人当前状态显示如下信息,有错误等情况都会高亮显示:
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
No package or stack in the current directory
================================================================================
Static checks summary:Found 1 error(s).
ERROR ROS Dep database not updated: Please update rosdep database with 'rosdep update'.
================================================================================
Beginning tests of your ROS graph. These may take a while...
analyzing graph...
... done analyzing graph
running graph rules...
connection to [/tf_echo_1652154589994246734] timed out
... done running graph rulesOnline checks summary:
Found 1 warning(s).
Warnings are things that may be just fine, but are sometimes at faultWARNING The following node subscriptions are unconnected:
* /tf_echo_1652154589994246734:
* /tf_static
* /turtle_pointer:
* /tf_static
Found 2 error(s).ERROR Could not contact the following nodes:
* /tf_echo_1652154589994246734ERROR Errors connecting to the following services:
* service [/tf_echo_1652154589994246734/set_logger_level] appears to be malfunctioning: Unable to communicate with service [/tf_echo_1652154589994246734/set_logger_level], address [rosrpc://jetson-desktop:54551]
* service [/tf_echo_1652154589994246734/get_loggers] appears to be malfunctioning: Unable to communicate with service [/tf_echo_1652154589994246734/get_loggers], address [rosrpc://jetson-desktop:54551]
3、tab键
tab键,能够将代码补全或显示有关输入命令的未完成命令,双击tab键可以提高效率和确保输入的命令是无误的。
比如输入:rosrun rqt_ 然后双击tab键,将自动出现关于rqt开头的各种节点:
rqt_action rqt_logger_level rqt_robot_monitor
rqt_bag rqt_moveit rqt_robot_steering
rqt_bag_plugins rqt_msg rqt_runtime_monitor
rqt_console rqt_nav_view rqt_rviz
rqt_dep rqt_plot rqt_service_caller
rqt_graph rqt_pose_view rqt_shell
rqt_gui rqt_publisher rqt_srv
rqt_gui_cpp rqt_py_common rqt_tf_tree
rqt_gui_py rqt_py_console rqt_top
rqt_image_view rqt_reconfigure rqt_topic
rqt_launch rqt_robot_dashboard rqt_web
如果内容显示特别多,还会提示,比如我只输入:rosrun然后双击tab键
Display all 229 possibilities? (y or n)
可以选择是否继续显示。
如果输入的命令接下来是确定性匹配,这个时候双击tab键将自动补全剩余的。
比如输入:rosrun rqt_gu
双击tab键将会自动补全成rosrun rqt_gui,我们再次双击tab键,将列出rqt_gui开头的所有匹配节点:
rqt_gui rqt_gui_cpp rqt_gui_py
4、可视化工具
4.1、rqt_graph
rqt_graph可以将计算图可视化,输入命令:rosrun rqt_graph rqt_graph
如果没有启动节点管理器而直接运行这条命令则会报错:
Could not find ROS master,Either start a 'roscore' or abort loading the plugin.
 所以我们在此之前,先启动节点管理器,也是以海龟为示例,然后运行上面那条命令,如下图:
所以我们在此之前,先启动节点管理器,也是以海龟为示例,然后运行上面那条命令,如下图:
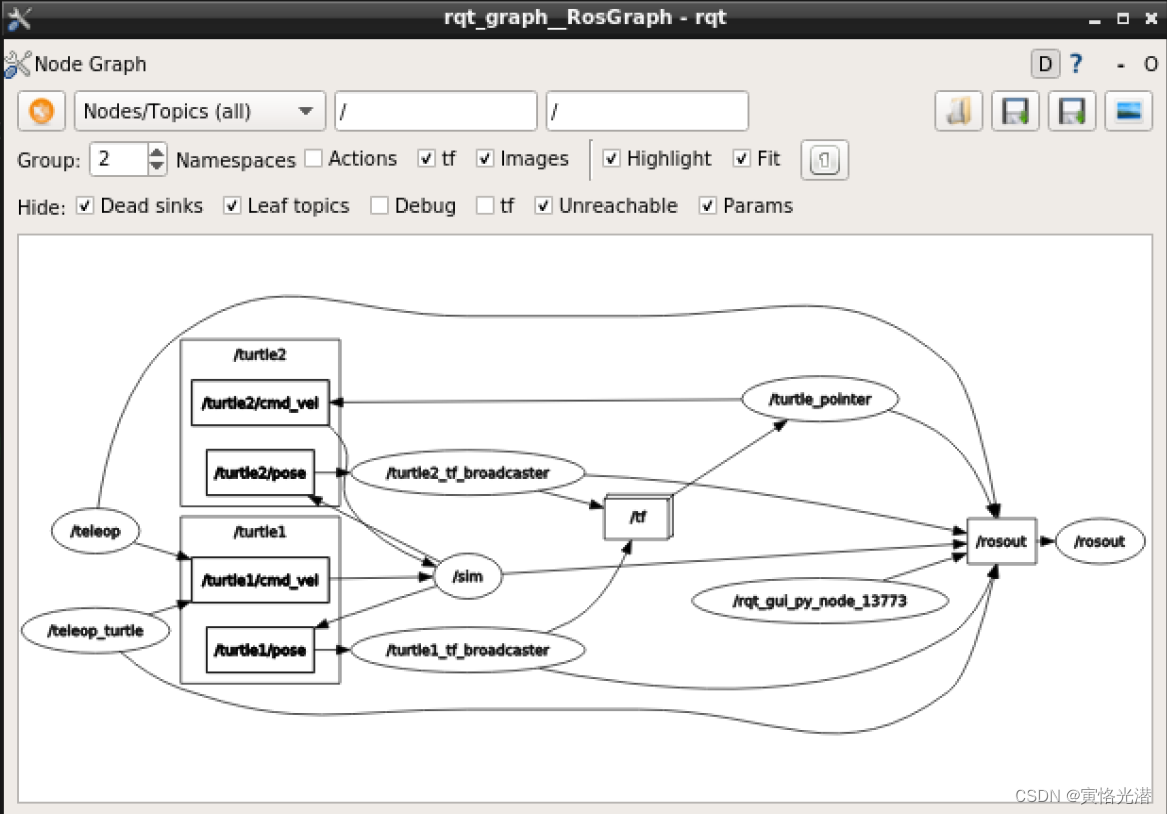
可以直观的看到两个海龟节点,里面有pose位姿,键盘操作等话题,然后位姿通过各自的广播来发布信息,中间有一个就是我们这节重点讲解的tf坐标系的话题topic:/tf(具备订阅和发布功能)来变换坐标,最后通过节点/turtle_pointer到/rosout输出。
对于图中有哪些节点,我们也可以通过命令来获取:rosnode list
/rosout
/sim
/teleop
/teleop_turtle
/turtle1_tf_broadcaster
/turtle2_tf_broadcaster
/turtle_pointer
对于节点可以看做是网站中的各自端口对应的应用,所以我们也可以像ping网络一样的来查看:
rosnode ping /rosout
rosnode: node is [/rosout]
pinging /rosout with a timeout of 3.0s
xmlrpc reply from http://jetson-desktop:46881/ time=1.574039ms
xmlrpc reply from http://jetson-desktop:46881/ time=1.164913ms
...
rosnode ping /sim
rosnode: node is [/sim]
pinging /sim with a timeout of 3.0s
xmlrpc reply from http://jetson-desktop:36081/ time=1.548052ms
xmlrpc reply from http://jetson-desktop:36081/ time=1.078129ms
...
4.2、rqt_topic
rqt_topic查看话题的一个插件,能够知道各节点话题的具体实时变化情况,输入命令:
rosrun rqt_topic rqt_topic如下图:

可以看到,每个话题的详细信息,有Type消息类别、Bandwidth带宽、Hz频率、Value值。
我们点开/tf坐标系查看下里面有哪些属性,如下图:
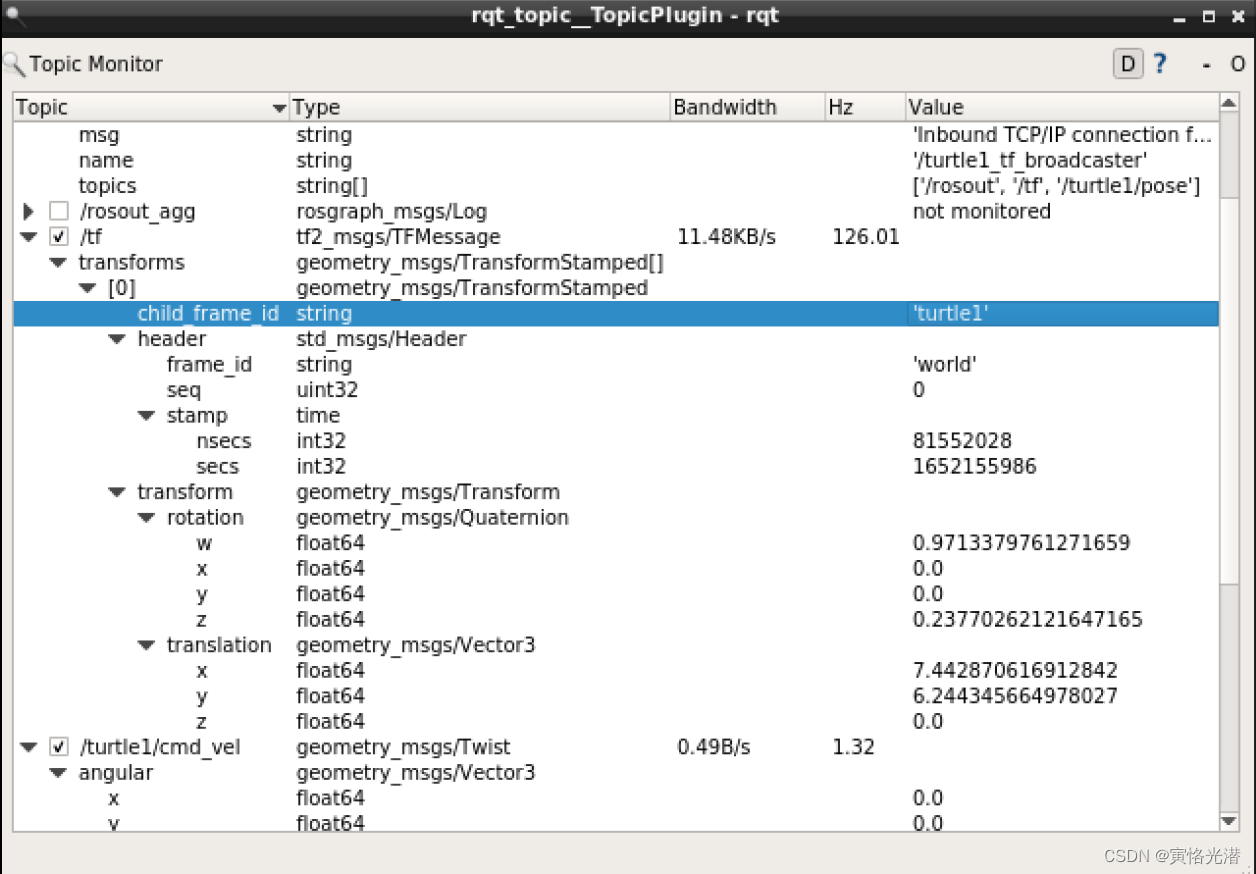
可以看到,指明了父坐标和子坐标,当然主要还是坐标的转换,其中时间戳有两个,一个纳秒和一个秒为单位的时间。
4.3、rqt_publisher
rqt_publisher用来发布具有固定或计算字段值的任意消息。输入命令:
rosrun rqt_publisher rqt_publisher
将会弹出如下图的界面:
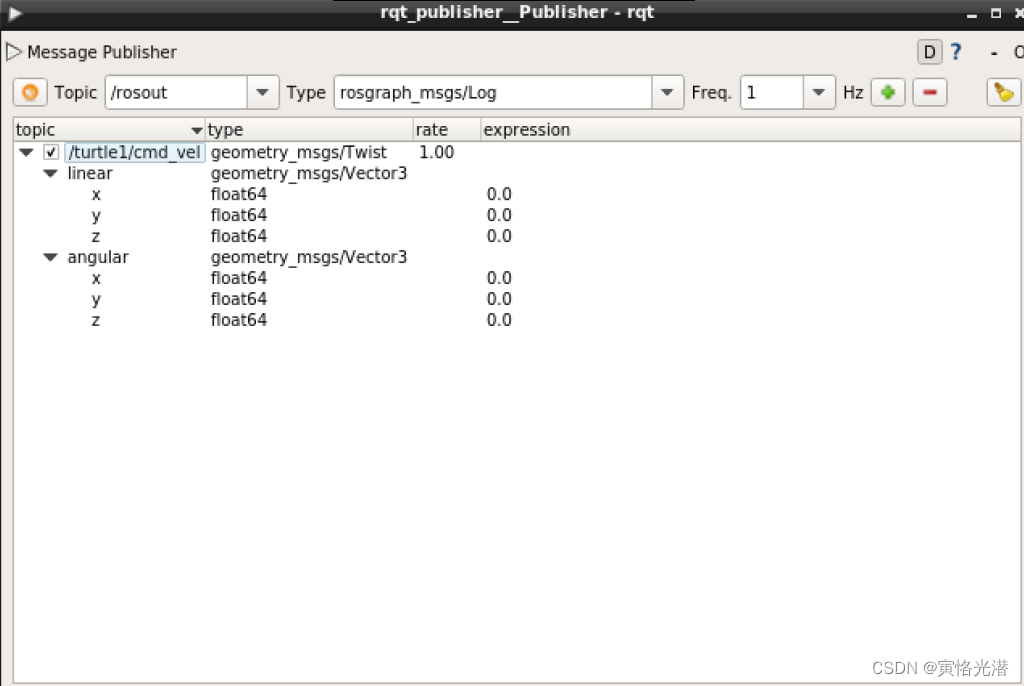
topic话题和type消息数据类型,都可以点击下拉框进行选择,频率的输入,然后点击+号添加进来。如下图:

然后就可以修改里面的expression字段对应的值,手动进行输入调试。
4.4、rviz
rviz是ROS自带的一个图形化工具,可以方便的对ros的程序进行图形化操作。输入命令:rviz
如下图:
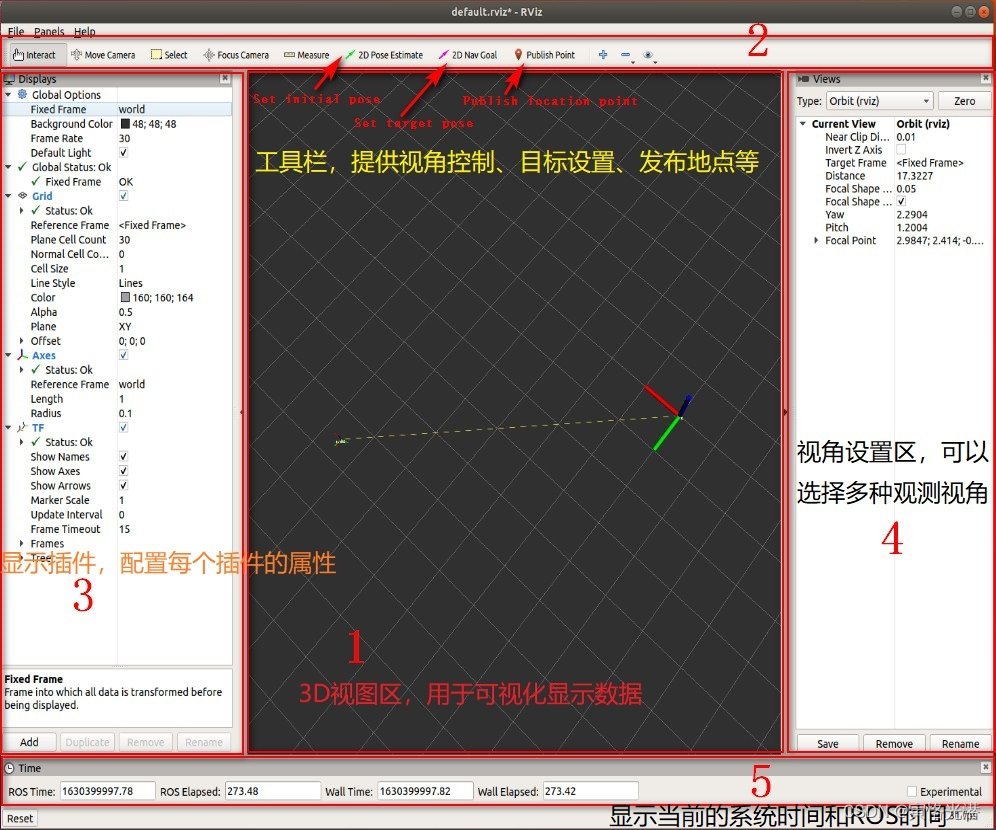
主要分5个功能区,如图中所标识的。其中工具栏中的Set initial pose、Set target pose、Publish location point:一般在建图导航时使用。
添加显示操作如图:
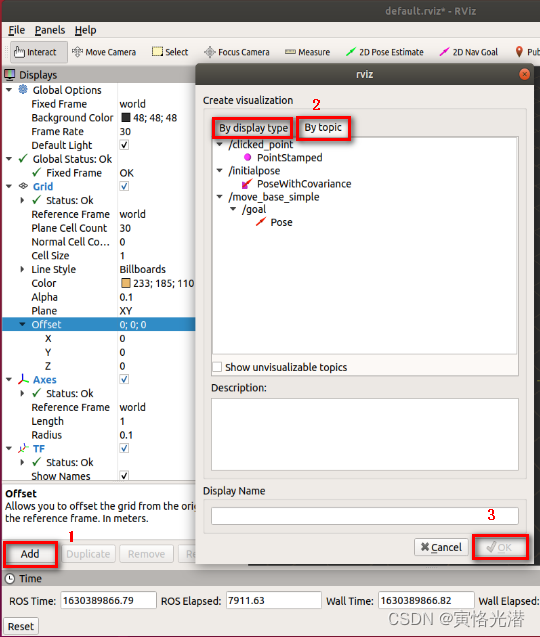
点击左下角的Add按钮,将会弹出一个界面,然后可以选择“By display type”通过显示类型来添加,不过需要自己修改对应话题,坐标系才可以显示出来;或者就是选择“By topic”通过话题的方式,直接添加就可以正常显示。最后点击右下角的OK按钮即可
最后温馨提示,在使用ROS核心工具和其他Linux命令的时候,常记得敲tab键,可以节省大量时间。