一直是手机拍照,用RealityCapture重建三维模型。因为他是靠特征点去把拍摄的多个图像进行对齐的。需要拍摄的足够多,且有特征才能对齐,要不然会生成多个组件,还得手动拼。
而且重建的三维模型有尺度问题,自动重建的模型有时候会倾斜...
后来epic出了手机app,RealityScan,但这个是手机拍摄的图像,直接上传到epic服务器做的空三计算。而且限制最大照片数量为200张,没办法拍更多。
从RealityScan的data目录找到了拍摄的照片,还发现每个照片都有位姿信息,导入RC可以直接跑计算,而且参考位姿的输入极大的提高了图像配对效果,拍卧室和客厅能直接合成一个组件。
这个位姿信息就是靠手机的imu+摄像头组成的vio系统获取来的,能用,但是想拍大场景很容易跑飞,比如我拍卧室拍的好好的,再来到客厅, 拍完客厅再回卧室,拍照点就全飞了.....
于是有个念头,自己做个安卓手机的slam导航定位,网上看着vins在手机上跑的挺好的,那就开整。
从github上搜vins android 能搜到几个2018 2019年的资料,看着哪个好,先下载下来。
对slam和安卓这些一窍不通,先找个参考。
比如奔跑的蚂蚁写的手机上的SLAM,这里就不加链接了,可以自行搜索。
他就是先装了个Android Studio,跑通了C++的hello world。
那么本节,我这也先装个Android Studio吧。
github里其中一个readme里写了,需要AS的版本在3.0.1以上。去官网看看,最新版2022.3.1.18
就先下载这个吧。
先装上



装完了,自动打开界面后,这个好像是个引导,需要魔法,不然很多东西装不上。
这里应该是安装各种包,去自定义看看都有啥
注意SDK的路径不能有空格啥的,调整一下位置,别啥都往C盘装。
他说我的电脑支持虚拟机加速,内存搞大些,够用,我实际设置了4GB,他推荐是2GB。

注意啊,一定要有魔法,不然可能都装不了。
魔法还剩4GB了,应该够用。
 报了个错,....网上搜了搜,是因为我开了Hyper-V....还得关了,
报了个错,....网上搜了搜,是因为我开了Hyper-V....还得关了,
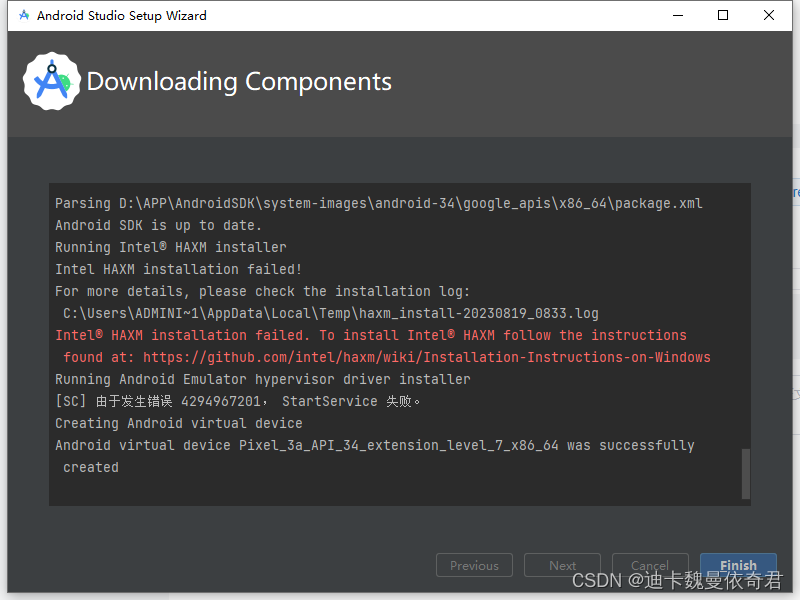
安装完毕后,编译APP,选择run,会再次提示这个虚拟机的问题,倒时候会自动安装。
最新版好像没有java了,搜了搜,好像是google换了kt语言....全是新东西....
从github上下载的工程都编译不了,和奔跑的蚂蚁的试验结果一样。
按他说的原话,
“与其花大量时间适配这个老工程,还不如把SLAM相关代码,移植到新工程。干~~~”