本文要介绍的是大模型的微调训练方法之一----LoRA。
0 背景
现在大模型非常火爆,大家都在想方设法应用大模型。 当前很多大模型虽说可以zero-shot直接使用, 但是在具体应用上一般还是微调一下效果更好, 也就是常说的finetune。 在小模型时代, finetune不是个问题。 但大模型时代, finetune是个大问题。 这是因为现在的大模型参数动辄10B起, 训练的代价非常高昂,即使是finetune也对计算资源有很高要求(finetune只是训练的步数少, 对显存等计算资源的占用并没有少)。 没个上百G的显存是玩不动的, 这对普通人的门槛实在太高了。
那么高效的finetune方式就非常必要了。LoRA就是高效finefune方法的一种。
1 LoRA原理
LoRA论文: LoRA: Low-Rank Adaptation of Large Language Models
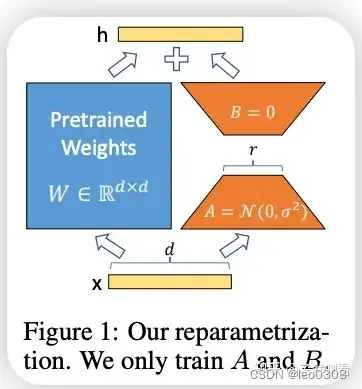
LoRA的原理非常简单, 先上一张图, 其实从图上已经能清楚地看到大致的原理的。 通俗地讲, 它的原理是这样的:大模型都是过参数化的, 当用于特定任务时, 其实只有一小部分参数起主要作用。 也就是参数矩阵维度很高, 但可以用低维矩阵分解近似。其实这个思想与矩阵特征向量, 主成分分析, 压缩感知等有异曲同工之妙。
具体做法是, 在网络中增加一个旁路结构,旁路是A和B两个矩阵相乘。 A矩阵的维度是dxr, B 矩阵的维度是rxd, 其中r<<d, 一般r取1,2,4,8就够了。那么这个旁路的参数量将远远小于原来网络的参数W。LoRA训练时, 我们冻结原来网络的参数W, 只训练旁路参数A和B。 由于A和B的参数量远远小于W, 那么训练时需要的显存开销就大约等于推理时的开销。 对采用Adam优化器来说, 需要的显存就大约相当于全参数finetune的1/3, 极大地减小了训练的代价。
论文中作者的实验也证明了这一点。 在GPT-3 175B的finetune中, 采用LoRA微调显存的消耗从1.2TB 降低到了350GB, 大约是三分之一
其实采用这种旁路相加的方式, 与ResNet的跳连方式也有异曲同工之妙。 原网络的参数不变, 在旁路上做些微小改变, 适应特定新任务。 这样就可以让网络基本保持原来的能力, 在特定任务上更精进了一步。
值得注意的是, LoRA微调并没有改变原有的预训练参数, 只是针对特定任务微调出了新的少量参数, 新的这些参数要与原有的预训练参数配合使用(实际使用时, 都是把旁路的参数和原来的参数直接合并, 也就是参数相加, 这样就完全不会增加推理时间)。这是非常方便的, 针对不同的任务, 都可以训练出自己的LoRA参数, 然后与原本的预训练参数结合, 做成插件式的应用。 这就是最近大火的SD + LoRA。全参数微调一般没这个条件, 但LoRA微调还是可以的。 目前Civitai上有上万LoRA的模型, 并且还在迅速增加。
2 代码详解
LoRA代码: https://github.com/microsoft/LoRA
LoRA原理很简单, 代码实现也不复杂。 简单地说,在模型实现上, 要在特定的模块上加一个旁路, 这个旁路就是两个矩阵相乘的形式。这些特定的模块理论上可以是任何模块, 目前作者实现的是在Linear, Embeding, Conv, Attention(只改其中的q和v)这些模块上加。
具体实现见:https://github.com/microsoft/LoRA/blob/main/loralib/layers.py
拿其中的Linear做个简单分析吧, 其他都是类似的。
class LoRALayer():
def __init__(
self,
r: int,
lora_alpha: int,
lora_dropout: float,
merge_weights: bool,
):
self.r = r
self.lora_alpha = lora_alpha
# Optional dropout
if lora_dropout > 0.:
self.lora_dropout = nn.Dropout(p=lora_dropout)
else:
self.lora_dropout = lambda x: x
# Mark the weight as unmerged
self.merged = False
self.merge_weights = merge_weights
class Linear(nn.Linear, LoRALayer):
# LoRA implemented in a dense layer
def __init__(
self,
in_features: int,
out_features: int,
r: int = 0,
lora_alpha: int = 1,
lora_dropout: float = 0.,
fan_in_fan_out: bool = False, # Set this to True if the layer to replace stores weight like (fan_in, fan_out)
merge_weights: bool = True,
**kwargs
):
nn.Linear.__init__(self, in_features, out_features, **kwargs)
LoRALayer.__init__(self, r=r, lora_alpha=lora_alpha, lora_dropout=lora_dropout,
merge_weights=merge_weights)
self.fan_in_fan_out = fan_in_fan_out
# Actual trainable parameters
if r > 0:
self.lora_A = nn.Parameter(self.weight.new_zeros((r, in_features)))
self.lora_B = nn.Parameter(self.weight.new_zeros((out_features, r)))
self.scaling = self.lora_alpha / self.r
# Freezing the pre-trained weight matrix
self.weight.requires_grad = False
self.reset_parameters()
if fan_in_fan_out:
self.weight.data = self.weight.data.transpose(0, 1)
def reset_parameters(self):
nn.Linear.reset_parameters(self)
if hasattr(self, 'lora_A'):
# initialize A the same way as the default for nn.Linear and B to zero
nn.init.kaiming_uniform_(self.lora_A, a=math.sqrt(5))
nn.init.zeros_(self.lora_B)
def train(self, mode: bool = True):
def T(w):
return w.transpose(0, 1) if self.fan_in_fan_out else w
nn.Linear.train(self, mode)
if mode:
if self.merge_weights and self.merged:
# Make sure that the weights are not merged
if self.r > 0:
self.weight.data -= T(self.lora_B @ self.lora_A) * self.scaling
self.merged = False
else:
if self.merge_weights and not self.merged:
# Merge the weights and mark it
if self.r > 0:
self.weight.data += T(self.lora_B @ self.lora_A) * self.scaling
self.merged = True
def forward(self, x: torch.Tensor):
def T(w):
return w.transpose(0, 1) if self.fan_in_fan_out else w
if self.r > 0 and not self.merged:
result = F.linear(x, T(self.weight), bias=self.bias)
result += (self.lora_dropout(x) @ self.lora_A.transpose(0, 1) @ self.lora_B.transpose(0, 1)) * self.scaling
return result
else:
return F.linear(x, T(self.weight), bias=self.bias)
在Linear层的实现上,多继承了一个LoRALayer, LoRALayer中就是设置了一些参数, 最主要的就是上面的讲道的矩阵的秩r了,其他就是一些辅助参数, 如控制训练和推理时主路参数和旁路参数是否合并等等。 在Linear层中, 多定义了A和B两个可训练的参数矩阵, 然后在forward中把主路和旁路输出相加, 基本上就是完全按照原理来的。
3 使用
实际使用LoRA微调时, 也不用自己向上面那样实现了。上面的loralib库已经实现好了, 直接使用就好了。具体而言, 就是把网络中原来使用nn.Linear用loralib库中的Linear替换就可以了, 其他的模块同理。
实际上, 还有更简洁的方式,huggingface pert库很贴心地把各种finetune方式都做了集成, 更加简单和方便。