1.简单介绍
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。像雷达、摄像头、GPS… 等等一些传感器数据的采集,也都是使用了话题通信,换言之,话题通信适用于不断更新的、少逻辑处理的数据传输场景。
2.理论模型
该模型中涉及到三个角色:
ROS Master (管理者)
Talker (发布者)
Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。

整个流程由以下步骤实现(引用自Autolabor-ROS):
0.Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
3.Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
4.Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
5.Listener与Talker件里连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
6.Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。即便关闭ROS Master,Talker 与 Listern 照常通信。
3.模型实现(C++)
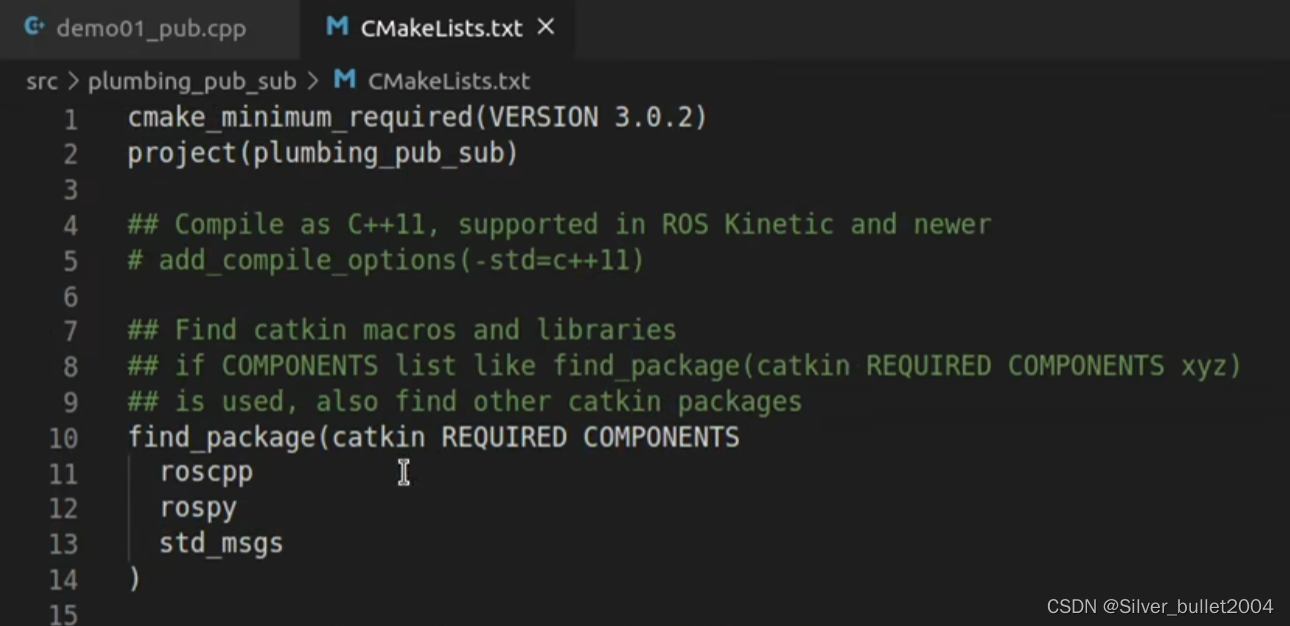
首先创建工作空间,并shift+ctrl+B配置好编译文件,然后创建功能包plumbing_pub_sub并添加依赖,然后创建cpp源文件
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,所以大体流程如下:
1.编写发布方实现;
2.编写订阅方实现;
3.编辑配置文件;
4.编译并执行。
1.发布方实现:demo01_pub.cpp
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:HelloWorld 后缀数字编号
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 发布者 对象
5.组织被发布的数据,并编写逻辑发布数据
*/
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>
int main(int argc, char *argv[])
{
//设置编码,避免中文乱码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒1次/1HZ)
ros::Rate r(1);
//节点不死
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息是:%s",msg.data.c_str());
//根据前面制定的发送频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
}
return 0;
}
2.订阅方实现:demo02_sub.cpp
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 订阅者 对象
5.处理订阅的消息(回调函数)
6.设置循环调用回调函数
*/
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
//通过msg_p获取并操作订阅到的数据
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("我听见:%s",msg_p->data.c_str());
// ROS_INFO("我听见:%s",(*msg_p).data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
//5.处理订阅的消息(回调函数)
ros::Subscriber sub = nh.subscribe<std_msgs::String>("chatter",10,doMsg);
//6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
}
3.编辑配置文件CMakeList
add_executable(demo01_pub
src/demo01_pub.cpp
)
add_executable(demo02_sub
src/demo02_sub.cpp
)
target_link_libraries(demo01_pub
${catkin_LIBRARIES}
)
target_link_libraries(demo02_sub
${catkin_LIBRARIES}
)
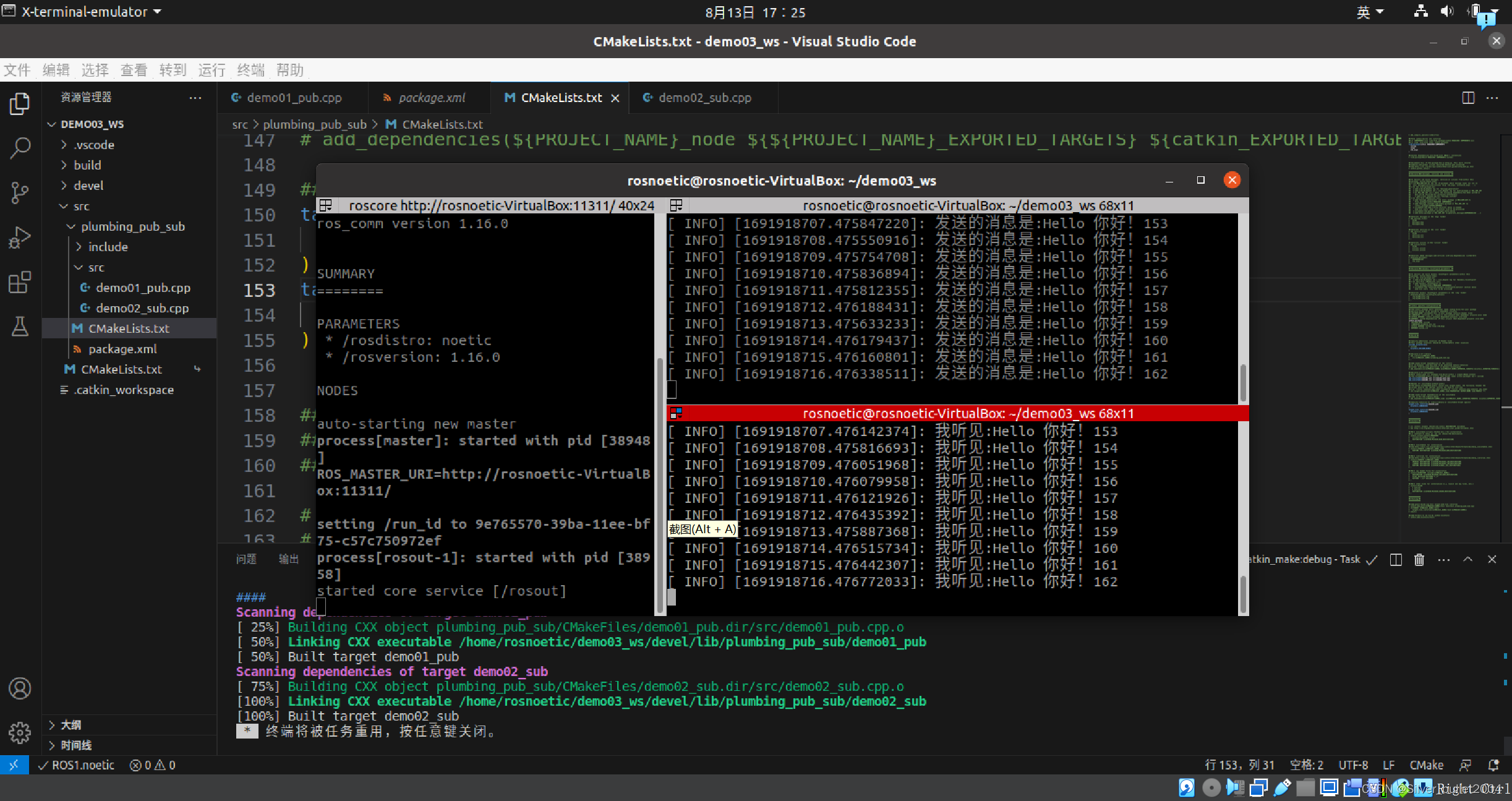
然后ctrl + shift + B 编译后再执行:编译完成后启动roscore ,再启动发布节点,再启动订阅节点,效果如下。。。
一些注意事项:
补充0:
vscode 中的 main 函数 声明 int main(int argc, char const *argv[]){},默认生成 argv 被 const 修饰,需要去除该修饰符
补充1:
ros/ros.h No such file or directory …
检查 CMakeList.txt find_package 依赖出现重复,删除多出来的包即可
补充2:
订阅时,第一条数据丢失
原因: 发送第一条数据时, publisher 还未在 roscore 注册完毕
解决: 注册后,加入休眠 ros::Duration(3.0).sleep(); 延迟第一条数据的发送
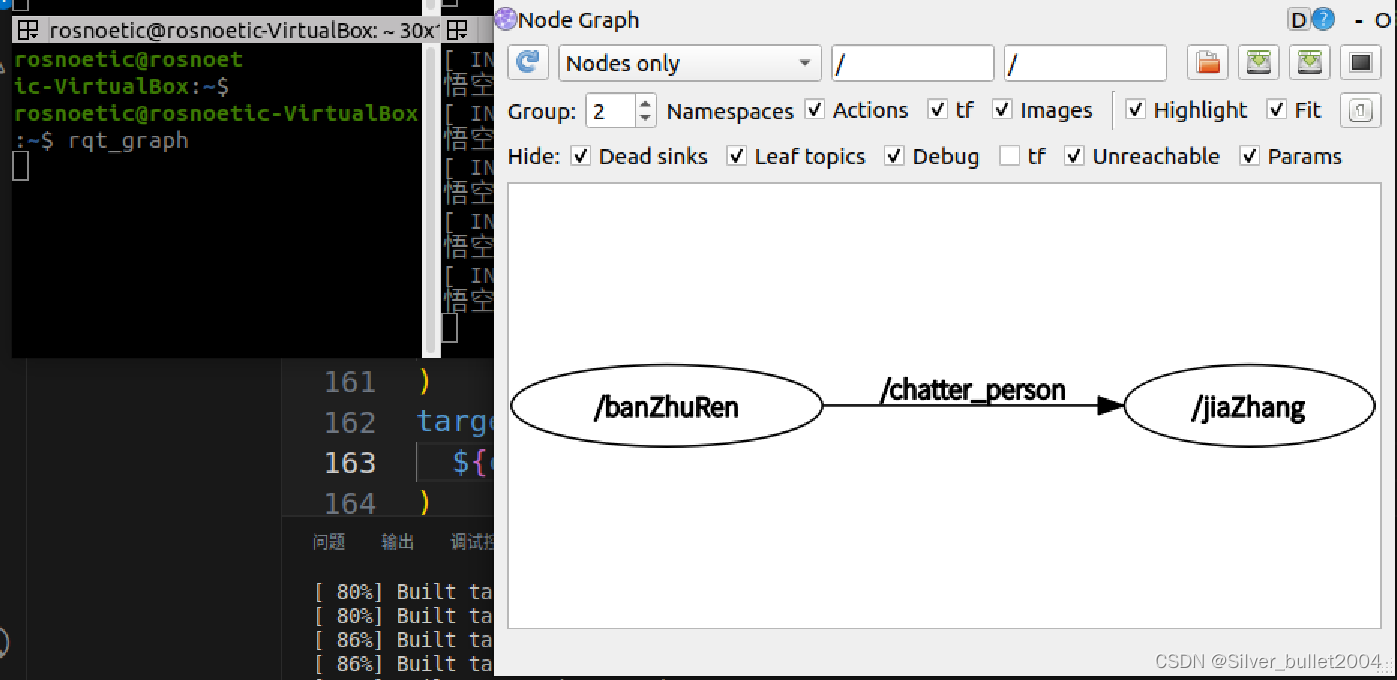
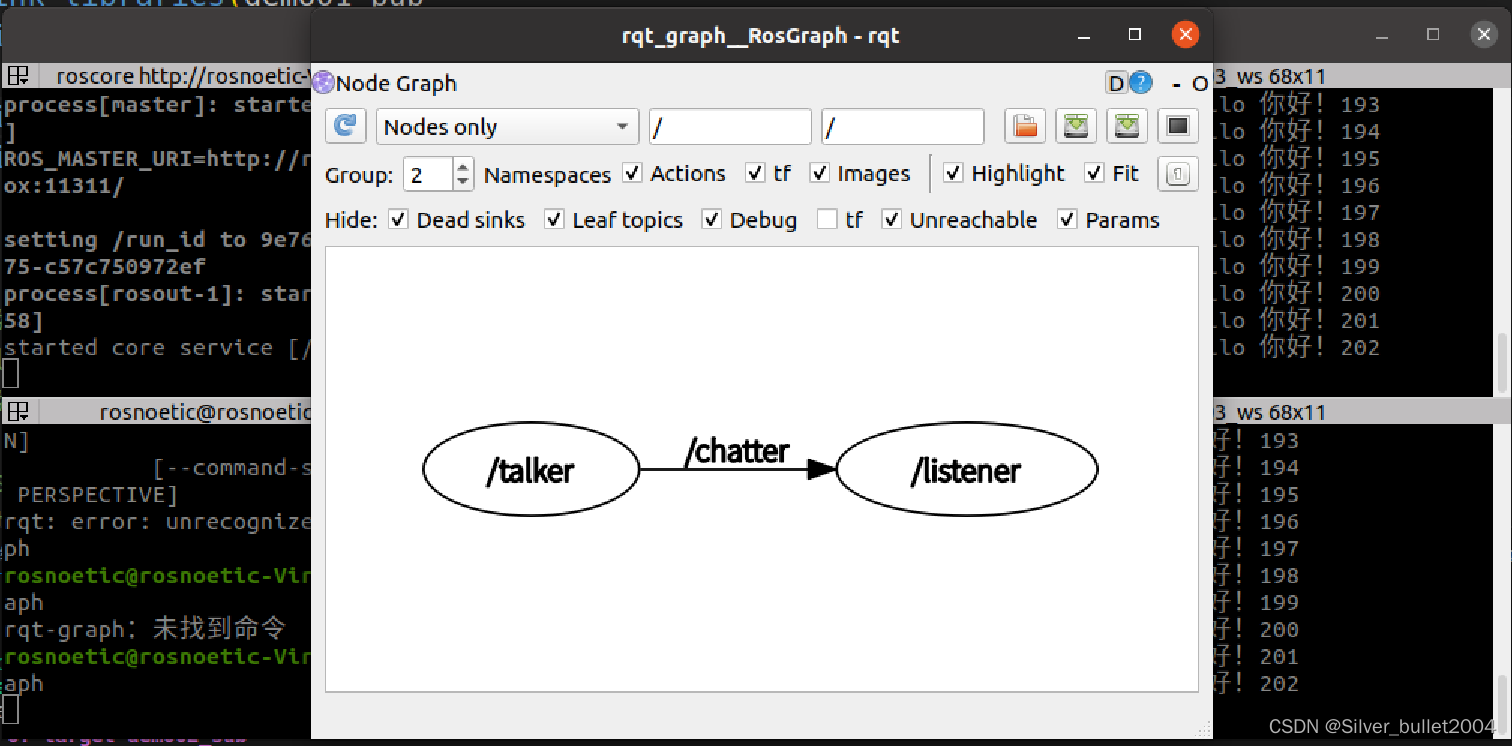
补充3:
可以新开一个终端,输入rqt_graph查看计算图
4.话题通信自定义msg
ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息… std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
int8, int16, int32, int64 (或者无符号类型: uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
现在要自定义消息,该消息包含人的信息:姓名、身高、年龄等。
1.定义msg文件
功能包下新建 msg 目录,添加文件 Person.msg
string name
uint16 age
float64 height
2.编辑配置文件
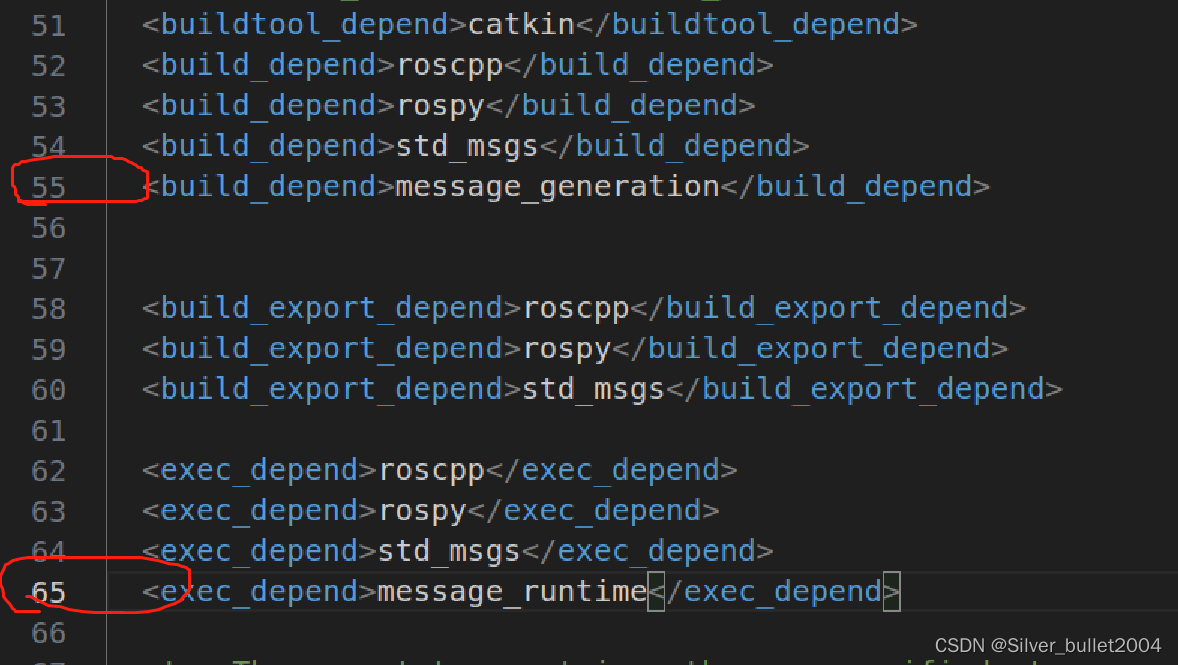
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
一条是编译,一条是运行
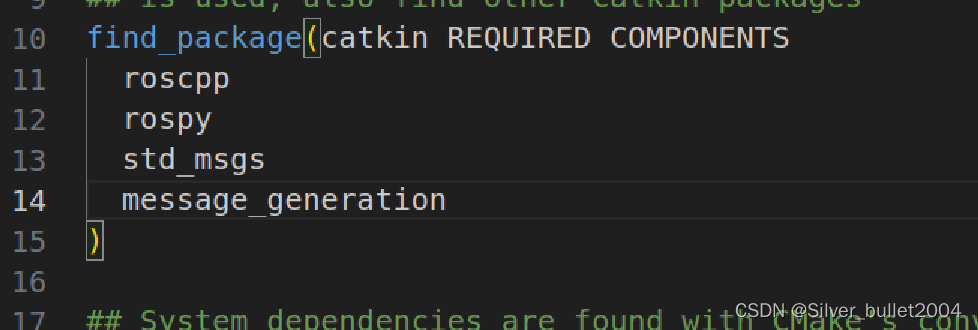
CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs
放开后多添加一个编译依赖
## 配置 msg 源文件
add_message_files(
FILES
Person.msg
)
放开后添加自定义msg文件

# 生成消息时依赖于 std_msgs
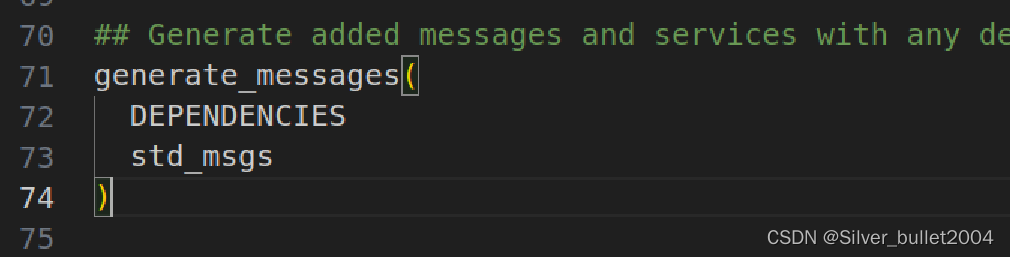
generate_messages(
DEPENDENCIES
std_msgs
)
直接找到并放开
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
放开后,多添加一个执行依赖

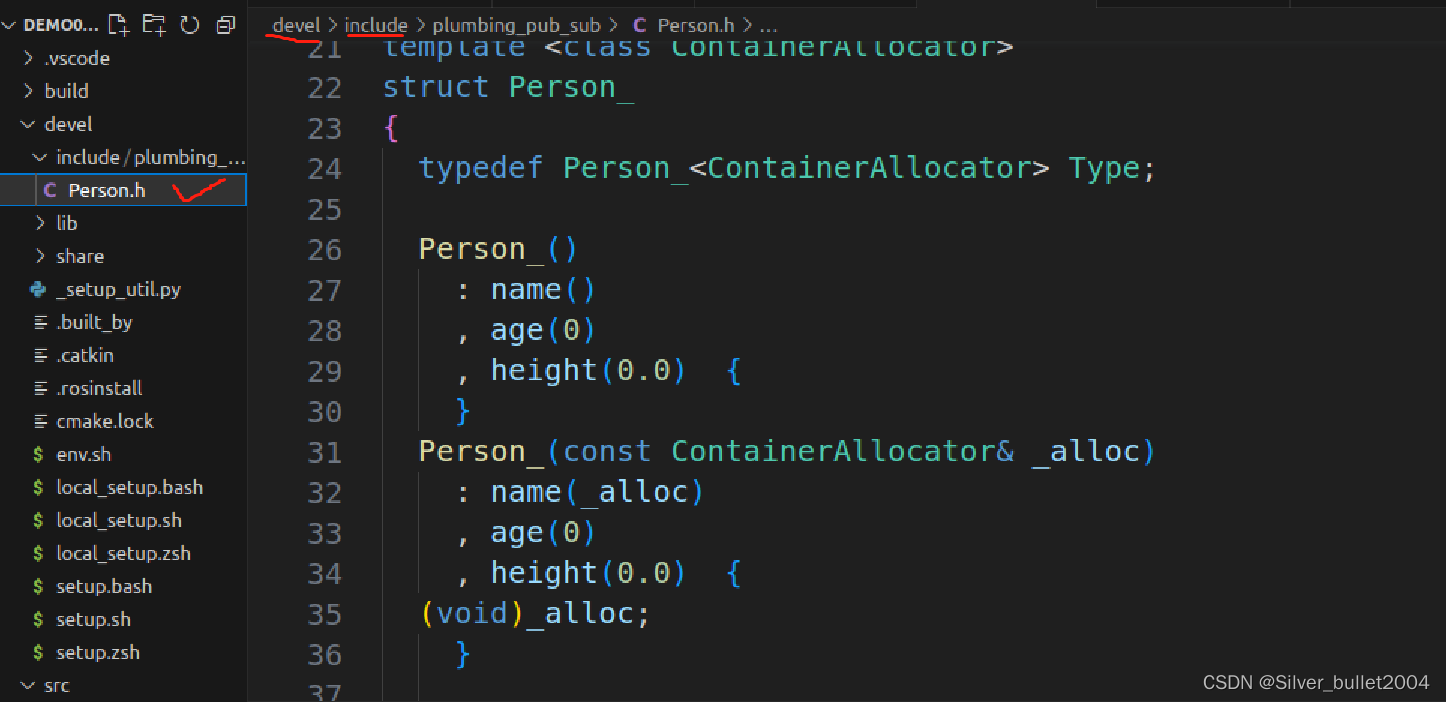
然后编译生成中间文件:之后只要调用头文件就可以正常使用了。
5.自定义msg的调用(C++)
vscode 配置
为了方便代码提示以及避免误抛异常,需要先配置 vscode,将前面生成的 head 文件路径配置进 c_cpp_properties.json 的 includepath属性:
右击头文件所在的包,在集成终端中打开,并输入pwd
会得到这个头文件的路径
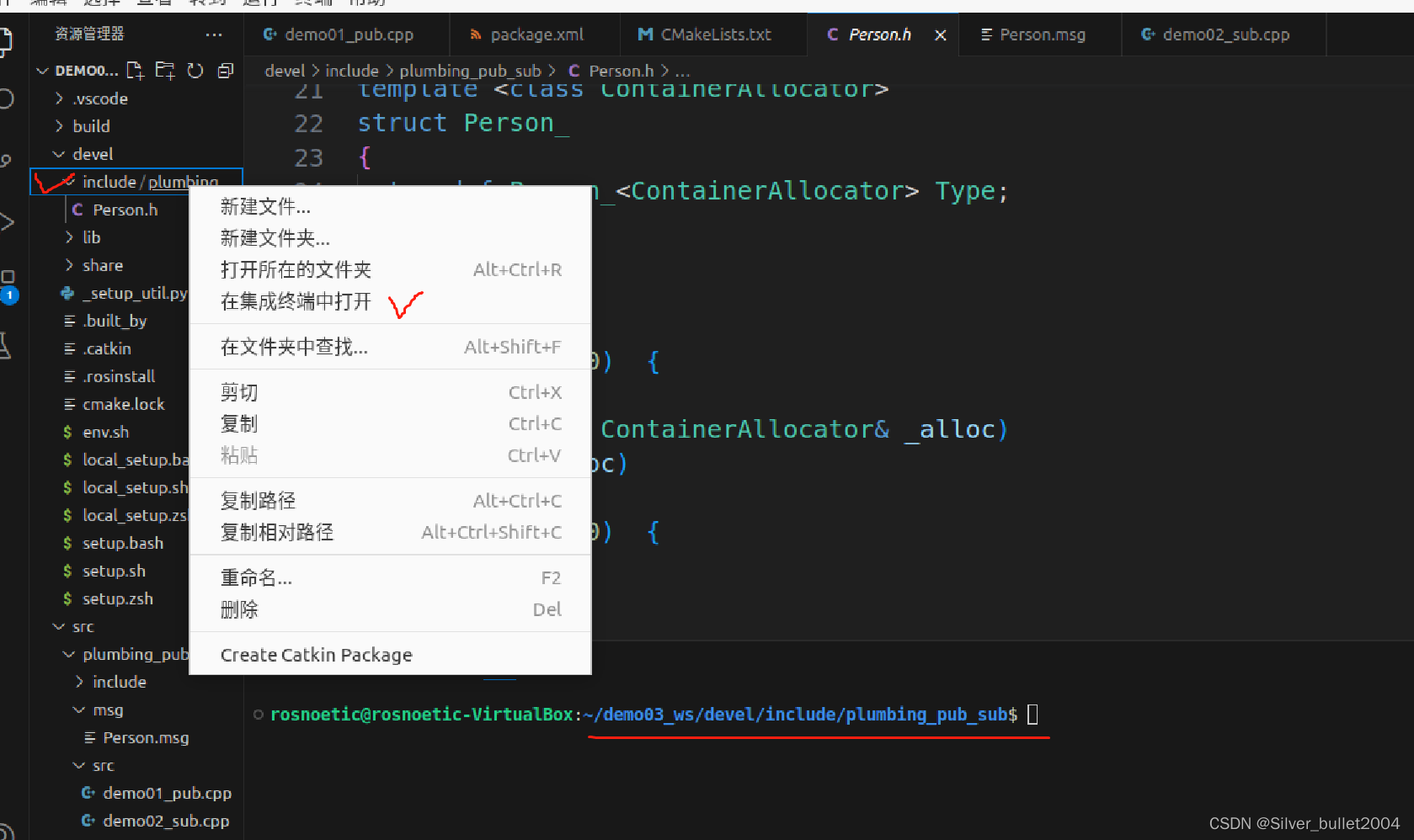

把这个路径复制到这个文件的includePath中,把最后的包名改成 * * 可以包括进所有包,添加的时候,前一条路径最后面的逗号别忘了加

发布方
和之前一样的道理,只不过发送的消息不同
/*
需求: 循环发布人的信息
*/
#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,""); //避免输出乱码
//1.初始化 ROS 节点
ros::init(argc,argv,"banZhuRen");
//2.创建 ROS 句柄
ros::NodeHandle nh;
//3.创建发布者对象
ros::Publisher pub = nh.advertise<plumbing_pub_sub::Person>("chatter_person",1000);
//4.组织被发布的消息,编写发布逻辑并发布消息
//创建被发布的数据
plumbing_pub_sub::Person p;
p.name = "孙悟空";
p.age = 2000;
p.height = 1.45;
//发布频率
ros::Rate r(1);
//循环发布
while (ros::ok())
{
pub.publish(p);
p.age += 1;
ROS_INFO("我叫:%s,今年%d岁,高%.2f米", p.name.c_str(), p.age, p.height);
r.sleep();
ros::spinOnce();
}
return 0;
}
订阅方
/*
需求: 订阅人的信息
*/
#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"
void doPerson(const plumbing_pub_sub::Person::ConstPtr& person_p){
ROS_INFO("订阅的人信息:%s, %d, %.2f", person_p->name.c_str(), person_p->age, person_p->height);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//1.初始化 ROS 节点
ros::init(argc,argv,"jiaZhang");
//2.创建 ROS 句柄
ros::NodeHandle nh;
//3.创建订阅者对象
//4.回调函数中处理 person
ros::Subscriber sub = nh.subscribe<plumbing_pub_sub::Person>("chatter_person",10,doPerson);
//5.转头执行回调函数
ros::spin();
return 0;
}
配置CMakeList
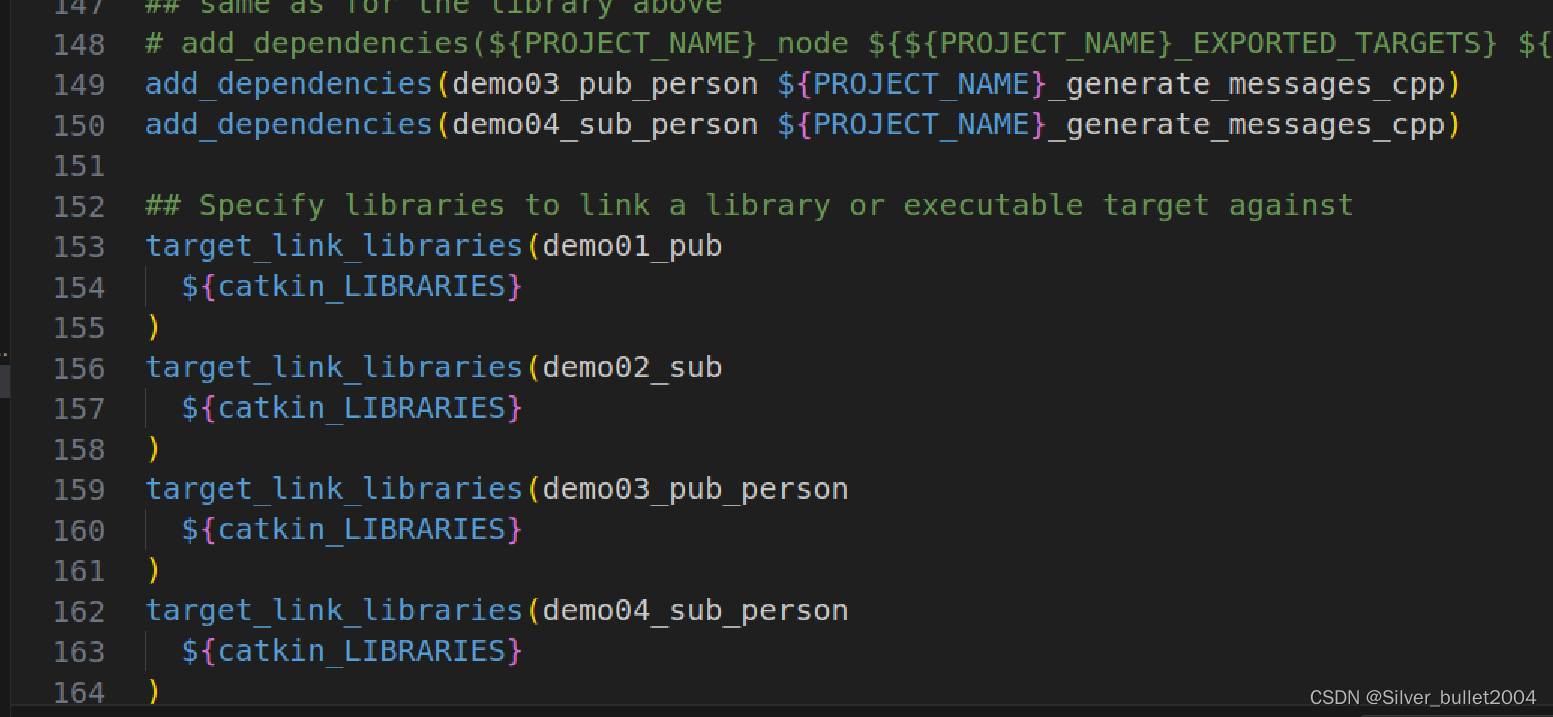
需要添加 add_dependencies 用以设置所依赖的消息相关的中间文件。
以保证先编译自定义msg文件,再去编译cpp源文件
add_executable(新发布方源文件名 src/源文件名.cpp)
add_executable(新订阅方源文件名 src/源文件名.cpp)
add_dependencies(新发布方源文件名 ${PROJECT_NAME}_generate_messages_cpp)
add_dependencies(新订阅方源文件名 ${PROJECT_NAME}_generate_messages_cpp)
target_link_libraries(新发布方源文件名
${catkin_LIBRARIES}
)
target_link_libraries(新订阅方源文件名
${catkin_LIBRARIES}
)

然后编译运行即可。。。。效果和之前差不多,不过这次的消息类型是自定义的。
节点关系图