最近博主在研究一款低功耗加速度计LIS3DH,该加速度计有两种通信模式,IIC和SPI方式。IIC通信方式搞了一下 就好了,但是SPI方式针扎了两天才做出来,现在和大家分享一下心得。
开发环境:MDK keil5
使用芯片:STM32F103ZET6
使用硬件:SPI1,PA4=CS,PA5=CLK,PA6=SDO,PA7=SDA
I2C :PB10=SCL,PB11=SDA
博主查找了很多资料 将资料下载下来并进行整理




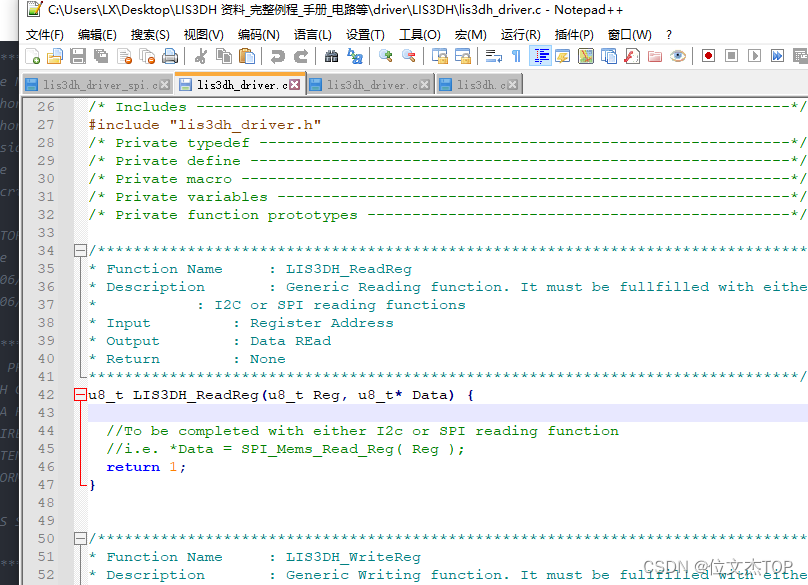
上图所示为 官方驱动 缺少了 读和写的底层驱动函数
如下代码 所示
u8_t LIS3DH_ReadReg(u8_t Reg, u8_t* Data)
和
u8_t LIS3DH_WriteReg(u8_t WriteAddr, u8_t Data)
支持SPI和I2C两种操作方式
/* Includes ------------------------------------------------------------------*/
#include "lis3dh_driver.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/*******************************************************************************
* Function Name : LIS3DH_ReadReg
* Description : Generic Reading function. It must be fullfilled with either
* : I2C or SPI reading functions
* Input : Register Address
* Output : Data REad
* Return : None
*******************************************************************************/
u8_t LIS3DH_ReadReg(u8_t Reg, u8_t* Data) {
//To be completed with either I2c or SPI reading function
//i.e. *Data = SPI_Mems_Read_Reg( Reg );
return 1;
}
/*******************************************************************************
* Function Name : LIS3DH_WriteReg
* Description : Generic Writing function. It must be fullfilled with either
* : I2C or SPI writing function
* Input : Register Address, Data to be written
* Output : None
* Return : None
*******************************************************************************/
u8_t LIS3DH_WriteReg(u8_t WriteAddr, u8_t Data) {
//To be completed with either I2c or SPI writing function
//i.e. SPI_Mems_Write_Reg(WriteAddr, Data);
return 1;
}
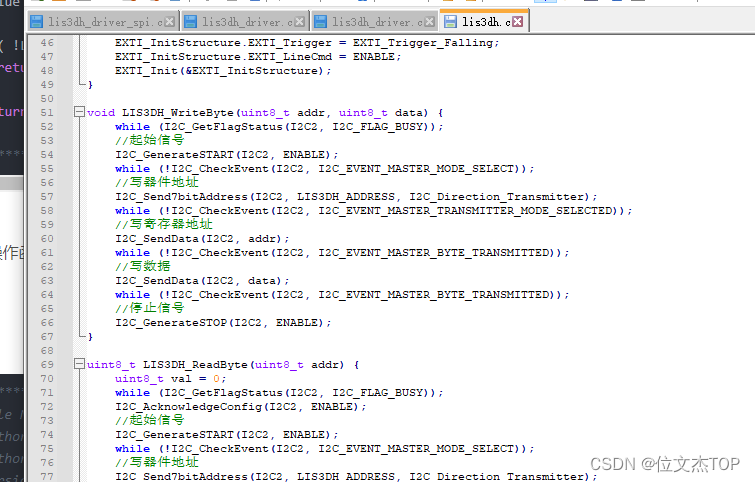
以为I2C的驱动方式
/******************** (C) COPYRIGHT 2012 STMicroelectronics ********************
* File Name : LIS3DH_driver.c
* Author : MSH Application Team
* Author : Fabio Tota
* Version : $Revision:$
* Date : $Date:$
* Description : LIS3DH driver file
*
* HISTORY:
* Date | Modification | Author
* 24/06/2011 | Initial Revision | Fabio Tota
* 11/06/2012 | Support for multiple drivers in the same program | Abhishek Anand
********************************************************************************
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
* AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
* INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
* CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
* INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* THIS SOFTWARE IS SPECIFICALLY DESIGNED FOR EXCLUSIVE USE WITH ST PARTS.
*
*******************************************************************************/
/* Includes ------------------------------------------------------------------*/
#include "lis3dh_driver.h"
#include "lis3dh.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/*******************************************************************************
* Function Name : LIS3DH_ReadReg
* Description : Generic Reading function. It must be fullfilled with either
* : I2C or SPI reading functions
* Input : Register Address
* Output : Data REad
* Return : None
*******************************************************************************/
u8_t LIS3DH_ReadReg(u8_t Reg, u8_t* Data) {
//To be completed with either I2c or SPI reading function
//i.e. *Data = SPI_Mems_Read_Reg( Reg );
*Data = LIS3DH_ReadByte(Reg);
return 1;
}
/*******************************************************************************
* Function Name : LIS3DH_WriteReg
* Description : Generic Writing function. It must be fullfilled with either
* : I2C or SPI writing function
* Input : Register Address, Data to be written
* Output : None
* Return : None
*******************************************************************************/
u8_t LIS3DH_WriteReg(u8_t WriteAddr, u8_t Data) {
//To be completed with either I2c or SPI writing function
//i.e. SPI_Mems_Write_Reg(WriteAddr, Data);
LIS3DH_WriteByte(WriteAddr, Data);
return 1;
}
/* Private functions ---------------------------------------------------------*/
/*******************************************************************************
* Function Name : LIS3DH_GetWHO_AM_I
* Description : Read identification code by WHO_AM_I register
* Input : Char to empty by Device identification Value
* Output : None
* Return : Status [value of FSS]
*******************************************************************************/
status_t LIS3DH_GetWHO_AM_I(u8_t* val){
if( !LIS3DH_ReadReg(LIS3DH_WHO_AM_I, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusAUX
* Description : Read the AUX status register
* Input : Char to empty by status register buffer
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusAUX(u8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_STATUS_AUX, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusAUXBIT
* Description : Read the AUX status register BIT
* Input : LIS3DH_STATUS_AUX_321OR, LIS3DH_STATUS_AUX_3OR, LIS3DH_STATUS_AUX_2OR, LIS3DH_STATUS_AUX_1OR,
LIS3DH_STATUS_AUX_321DA, LIS3DH_STATUS_AUX_3DA, LIS3DH_STATUS_AUX_2DA, LIS3DH_STATUS_AUX_1DA
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusAUXBit(u8_t statusBIT, u8_t* val) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_STATUS_AUX, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_STATUS_AUX_321OR){
if(value &= LIS3DH_STATUS_AUX_321OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_3OR){
if(value &= LIS3DH_STATUS_AUX_3OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_2OR){
if(value &= LIS3DH_STATUS_AUX_2OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_1OR){
if(value &= LIS3DH_STATUS_AUX_1OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_321DA){
if(value &= LIS3DH_STATUS_AUX_321DA) {
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_3DA){
if(value &= LIS3DH_STATUS_AUX_3DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_2DA){
if(value &= LIS3DH_STATUS_AUX_2DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_1DA){
if(value &= LIS3DH_STATUS_AUX_1DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_SetODR
* Description : Sets LIS3DH Output Data Rate
* Input : Output Data Rate
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetODR(LIS3DH_ODR_t ov){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
value &= 0x0f;
value |= ov<<LIS3DH_ODR_BIT;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetTemperature
* Description : Sets LIS3DH Output Temperature
* Input : MEMS_ENABLE, MEMS_DISABLE
* Output : None
* Note : For Read Temperature by LIS3DH_OUT_AUX_3, LIS3DH_SetADCAux and LIS3DH_SetBDU
functions must be ENABLE
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetTemperature(State_t state){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_TEMP_CFG_REG, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= state<<LIS3DH_TEMP_EN;
if( !LIS3DH_WriteReg(LIS3DH_TEMP_CFG_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetADCAux
* Description : Sets LIS3DH Output ADC
* Input : MEMS_ENABLE, MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetADCAux(State_t state){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_TEMP_CFG_REG, &value) )
return MEMS_ERROR;
value &= 0x7F;
value |= state<<LIS3DH_ADC_PD;
if( !LIS3DH_WriteReg(LIS3DH_TEMP_CFG_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetAuxRaw
* Description : Read the Aux Values Output Registers
* Input : Buffer to empty
* Output : Aux Values Registers buffer
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetAuxRaw(LIS3DH_Aux123Raw_t* buff) {
u8_t valueL;
u8_t valueH;
if( !LIS3DH_ReadReg(LIS3DH_OUT_1_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_1_H, &valueH) )
return MEMS_ERROR;
buff->AUX_1 = (u16_t)( (valueH << 8) | valueL )/16;
if( !LIS3DH_ReadReg(LIS3DH_OUT_2_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_2_H, &valueH) )
return MEMS_ERROR;
buff->AUX_2 = (u16_t)( (valueH << 8) | valueL )/16;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_H, &valueH) )
return MEMS_ERROR;
buff->AUX_3 = (u16_t)( (valueH << 8) | valueL )/16;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetTempRaw
* Description : Read the Temperature Values by AUX Output Registers OUT_3_H
* Input : Buffer to empty
* Output : Temperature Values Registers buffer
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetTempRaw(i8_t* buff) {
u8_t valueL;
u8_t valueH;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_H, &valueH) )
return MEMS_ERROR;
*buff = (i8_t)( valueH );
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetMode
* Description : Sets LIS3DH Operating Mode
* Input : Modality (LIS3DH_NORMAL, LIS3DH_LOW_POWER, LIS3DH_POWER_DOWN)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetMode(LIS3DH_Mode_t md) {
u8_t value;
u8_t value2;
static u8_t ODR_old_value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value2) )
return MEMS_ERROR;
if((value & 0xF0)==0)
value = value | (ODR_old_value & 0xF0); //if it comes from POWERDOWN
switch(md) {
case LIS3DH_POWER_DOWN:
ODR_old_value = value;
value &= 0x0F;
break;
case LIS3DH_NORMAL:
value &= 0xF7;
value |= (MEMS_RESET<<LIS3DH_LPEN);
value2 &= 0xF7;
value2 |= (MEMS_SET<<LIS3DH_HR); //set HighResolution_BIT
break;
case LIS3DH_LOW_POWER:
value &= 0xF7;
value |= (MEMS_SET<<LIS3DH_LPEN);
value2 &= 0xF7;
value2 |= (MEMS_RESET<<LIS3DH_HR); //reset HighResolution_BIT
break;
default:
return MEMS_ERROR;
}
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value2) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetAxis
* Description : Enable/Disable LIS3DH Axis
* Input : LIS3DH_X_ENABLE/DISABLE | LIS3DH_Y_ENABLE/DISABLE | LIS3DH_Z_ENABLE/DISABLE
* Output : None
* Note : You MUST use all input variable in the argument, as example
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetAxis(LIS3DH_Axis_t axis) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
value &= 0xF8;
value |= (0x07 & axis);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetFullScale
* Description : Sets the LIS3DH FullScale
* Input : LIS3DH_FULLSCALE_2/LIS3DH_FULLSCALE_4/LIS3DH_FULLSCALE_8/LIS3DH_FULLSCALE_16
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetFullScale(LIS3DH_Fullscale_t fs) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xCF;
value |= (fs<<LIS3DH_FS);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetBDU
* Description : Enable/Disable Block Data Update Functionality
* Input : ENABLE/DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetBDU(State_t bdu) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0x7F;
value |= (bdu<<LIS3DH_BDU);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetBLE
* Description : Set Endianess (MSB/LSB)
* Input : BLE_LSB / BLE_MSB
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetBLE(LIS3DH_Endianess_t ble) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= (ble<<LIS3DH_BLE);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetSelfTest
* Description : Set Self Test Modality
* Input : LIS3DH_SELF_TEST_DISABLE/ST_0/ST_1
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetSelfTest(LIS3DH_SelfTest_t st) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xF9;
value |= (st<<LIS3DH_ST);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFClick
* Description : Enable/Disable High Pass Filter for click
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFClickEnable(State_t hpfe) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFB;
value |= (hpfe<<LIS3DH_HPCLICK);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFAOI1
* Description : Enable/Disable High Pass Filter for AOI on INT_1
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFAOI1Enable(State_t hpfe) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFE;
value |= (hpfe<<LIS3DH_HPIS1);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFAOI2
* Description : Enable/Disable High Pass Filter for AOI on INT_2
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFAOI2Enable(State_t hpfe) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFD;
value |= (hpfe<<LIS3DH_HPIS2);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetHPFMode
* Description : Set High Pass Filter Modality
* Input : LIS3DH_HPM_NORMAL_MODE_RES/LIS3DH_HPM_REF_SIGNAL/
LIS3DH_HPM_NORMAL_MODE/LIS3DH_HPM_AUTORESET_INT
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetHPFMode(LIS3DH_HPFMode_t hpm) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0x3F;
value |= (hpm<<LIS3DH_HPM);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetHPFCutOFF
* Description : Set High Pass CUT OFF Freq
* Input : HPFCF [0,3]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetHPFCutOFF(LIS3DH_HPFCutOffFreq_t hpf) {
u8_t value;
if (hpf > 3)
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xCF;
value |= (hpf<<LIS3DH_HPCF);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetFilterDataSel
* Description : Set Filter Data Selection bypassed or sent to FIFO OUT register
* Input : MEMS_SET, MEMS_RESET
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetFilterDataSel(State_t state) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xF7;
value |= (state<<LIS3DH_FDS);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Pin
* Description : Set Interrupt1 pin Function
* Input : LIS3DH_CLICK_ON_PIN_INT1_ENABLE/DISABLE | LIS3DH_I1_INT1_ON_PIN_INT1_ENABLE/DISABLE |
LIS3DH_I1_INT2_ON_PIN_INT1_ENABLE/DISABLE | LIS3DH_I1_DRDY1_ON_INT1_ENABLE/DISABLE |
LIS3DH_I1_DRDY2_ON_INT1_ENABLE/DISABLE | LIS3DH_WTM_ON_INT1_ENABLE/DISABLE |
LIS3DH_INT1_OVERRUN_ENABLE/DISABLE
* example : SetInt1Pin(LIS3DH_CLICK_ON_PIN_INT1_ENABLE | LIS3DH_I1_INT1_ON_PIN_INT1_ENABLE |
LIS3DH_I1_INT2_ON_PIN_INT1_DISABLE | LIS3DH_I1_DRDY1_ON_INT1_ENABLE | LIS3DH_I1_DRDY2_ON_INT1_ENABLE |
LIS3DH_WTM_ON_INT1_DISABLE | LIS3DH_INT1_OVERRUN_DISABLE )
* Note : To enable Interrupt signals on INT1 Pad (You MUST use all input variable in the argument, as example)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Pin(LIS3DH_IntPinConf_t pinConf) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG3, &value) )
return MEMS_ERROR;
value &= 0x00;
value |= pinConf;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG3, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt2Pin
* Description : Set Interrupt2 pin Function
* Input : LIS3DH_CLICK_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_INT1_ON_PIN_INT2_ENABLE/DISABLE |
LIS3DH_I2_INT2_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_BOOT_ON_INT2_ENABLE/DISABLE |
LIS3DH_INT_ACTIVE_HIGH/LOW
* example : LIS3DH_SetInt2Pin(LIS3DH_CLICK_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_INT1_ON_PIN_INT2_ENABLE/DISABLE |
LIS3DH_I2_INT2_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_BOOT_ON_INT2_ENABLE/DISABLE |
LIS3DH_INT_ACTIVE_HIGH/LOW)
* Note : To enable Interrupt signals on INT2 Pad (You MUST use all input variable in the argument, as example)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt2Pin(LIS3DH_IntPinConf_t pinConf) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG6, &value) )
return MEMS_ERROR;
value &= 0x00;
value |= pinConf;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG6, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickCFG
* Description : Set Click Interrupt config Function
* Input : LIS3DH_ZD_ENABLE/DISABLE | LIS3DH_ZS_ENABLE/DISABLE | LIS3DH_YD_ENABLE/DISABLE |
LIS3DH_YS_ENABLE/DISABLE | LIS3DH_XD_ENABLE/DISABLE | LIS3DH_XS_ENABLE/DISABLE
* example : LIS3DH_SetClickCFG( LIS3DH_ZD_ENABLE | LIS3DH_ZS_DISABLE | LIS3DH_YD_ENABLE |
LIS3DH_YS_DISABLE | LIS3DH_XD_ENABLE | LIS3DH_XS_ENABLE)
* Note : You MUST use all input variable in the argument, as example
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickCFG(u8_t status) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CLICK_CFG, &value) )
return MEMS_ERROR;
value &= 0xC0;
value |= status;
if( !LIS3DH_WriteReg(LIS3DH_CLICK_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickTHS
* Description : Set Click Interrupt threshold
* Input : Click-click Threshold value [0-127]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickTHS(u8_t ths) {
if(ths>127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CLICK_THS, ths) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickLIMIT
* Description : Set Click Interrupt Time Limit
* Input : Click-click Time Limit value [0-127]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickLIMIT(u8_t t_limit) {
if(t_limit>127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_TIME_LIMIT, t_limit) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickLATENCY
* Description : Set Click Interrupt Time Latency
* Input : Click-click Time Latency value [0-255]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickLATENCY(u8_t t_latency) {
if( !LIS3DH_WriteReg(LIS3DH_TIME_LATENCY, t_latency) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickWINDOW
* Description : Set Click Interrupt Time Window
* Input : Click-click Time Window value [0-255]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickWINDOW(u8_t t_window) {
if( !LIS3DH_WriteReg(LIS3DH_TIME_WINDOW, t_window) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetClickResponse
* Description : Get Click Interrupt Response by CLICK_SRC REGISTER
* Input : char to empty by Click Response Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetClickResponse(u8_t* res) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CLICK_SRC, &value) )
return MEMS_ERROR;
value &= 0x7F;
if((value & LIS3DH_IA)==0) {
*res = LIS3DH_NO_CLICK;
return MEMS_SUCCESS;
}
else {
if (value & LIS3DH_DCLICK){
if (value & LIS3DH_CLICK_SIGN){
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_DCLICK_Z_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_DCLICK_Y_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_DCLICK_X_N;
return MEMS_SUCCESS;
}
}
else{
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_DCLICK_Z_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_DCLICK_Y_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_DCLICK_X_P;
return MEMS_SUCCESS;
}
}
}
else{
if (value & LIS3DH_CLICK_SIGN){
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_SCLICK_Z_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_SCLICK_Y_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_SCLICK_X_N;
return MEMS_SUCCESS;
}
}
else{
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_SCLICK_Z_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_SCLICK_Y_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_SCLICK_X_P;
return MEMS_SUCCESS;
}
}
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_Int1LatchEnable
* Description : Enable Interrupt 1 Latching function
* Input : ENABLE/DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_Int1LatchEnable(State_t latch) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xF7;
value |= latch<<LIS3DH_LIR_INT1;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_ResetInt1Latch
* Description : Reset Interrupt 1 Latching function
* Input : None
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_ResetInt1Latch(void) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetIntConfiguration
* Description : Interrupt 1 Configuration (without LIS3DH_6D_INT)
* Input : LIS3DH_INT1_AND/OR | LIS3DH_INT1_ZHIE_ENABLE/DISABLE | LIS3DH_INT1_ZLIE_ENABLE/DISABLE...
* Output : None
* Note : You MUST use all input variable in the argument, as example
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetIntConfiguration(LIS3DH_Int1Conf_t ic) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
value &= 0x40;
value |= ic;
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetIntMode
* Description : Interrupt 1 Configuration mode (OR, 6D Movement, AND, 6D Position)
* Input : LIS3DH_INT_MODE_OR, LIS3DH_INT_MODE_6D_MOVEMENT, LIS3DH_INT_MODE_AND,
LIS3DH_INT_MODE_6D_POSITION
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetIntMode(LIS3DH_Int1Mode_t int_mode) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
value &= 0x3F;
value |= (int_mode<<LIS3DH_INT_6D);
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt6D4DConfiguration
* Description : 6D, 4D Interrupt Configuration
* Input : LIS3DH_INT1_6D_ENABLE, LIS3DH_INT1_4D_ENABLE, LIS3DH_INT1_6D_4D_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt6D4DConfiguration(LIS3DH_INT_6D_4D_t ic) {
u8_t value;
u8_t value2;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value2) )
return MEMS_ERROR;
if(ic == LIS3DH_INT1_6D_ENABLE){
value &= 0xBF;
value |= (MEMS_ENABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_DISABLE<<LIS3DH_D4D_INT1);
}
if(ic == LIS3DH_INT1_4D_ENABLE){
value &= 0xBF;
value |= (MEMS_ENABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_ENABLE<<LIS3DH_D4D_INT1);
}
if(ic == LIS3DH_INT1_6D_4D_DISABLE){
value &= 0xBF;
value |= (MEMS_DISABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_DISABLE<<LIS3DH_D4D_INT1);
}
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value2) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_Get6DPosition
* Description : 6D, 4D Interrupt Position Detect
* Input : Byte to empty by POSITION_6D_t Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_Get6DPosition(u8_t* val){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
value &= 0x7F;
switch (value){
case LIS3DH_UP_SX:
*val = LIS3DH_UP_SX;
break;
case LIS3DH_UP_DX:
*val = LIS3DH_UP_DX;
break;
case LIS3DH_DW_SX:
*val = LIS3DH_DW_SX;
break;
case LIS3DH_DW_DX:
*val = LIS3DH_DW_DX;
break;
case LIS3DH_TOP:
*val = LIS3DH_TOP;
break;
case LIS3DH_BOTTOM:
*val = LIS3DH_BOTTOM;
break;
}
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Threshold
* Description : Sets Interrupt 1 Threshold
* Input : Threshold = [0,31]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Threshold(u8_t ths) {
if (ths > 127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_INT1_THS, ths) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Duration
* Description : Sets Interrupt 1 Duration
* Input : Duration value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Duration(LIS3DH_Int1Conf_t id) {
if (id > 127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_INT1_DURATION, id) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_FIFOModeEnable
* Description : Sets Fifo Modality
* Input : LIS3DH_FIFO_DISABLE, LIS3DH_FIFO_BYPASS_MODE, LIS3DH_FIFO_MODE,
LIS3DH_FIFO_STREAM_MODE, LIS3DH_FIFO_TRIGGER_MODE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_FIFOModeEnable(LIS3DH_FifoMode_t fm) {
u8_t value;
if(fm == LIS3DH_FIFO_DISABLE) {
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1F;
value |= (LIS3DH_FIFO_BYPASS_MODE<<LIS3DH_FM);
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) ) //fifo mode bypass
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo disable
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_BYPASS_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_STREAM_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_TRIGGER_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetTriggerInt
* Description : Trigger event liked to trigger signal INT1/INT2
* Input : LIS3DH_TRIG_INT1/LIS3DH_TRIG_INT2
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetTriggerInt(LIS3DH_TrigInt_t tr) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0xDF;
value |= (tr<<LIS3DH_TR);
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetWaterMark
* Description : Sets Watermark Value
* Input : Watermark = [0,31]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetWaterMark(u8_t wtm) {
u8_t value;
if(wtm > 31)
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0xE0;
value |= wtm;
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusReg
* Description : Read the status register
* Input : char to empty by Status Reg Value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusReg(u8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_STATUS_REG, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusBIT
* Description : Read the status register BIT
* Input : LIS3DH_STATUS_REG_ZYXOR, LIS3DH_STATUS_REG_ZOR, LIS3DH_STATUS_REG_YOR, LIS3DH_STATUS_REG_XOR,
LIS3DH_STATUS_REG_ZYXDA, LIS3DH_STATUS_REG_ZDA, LIS3DH_STATUS_REG_YDA, LIS3DH_STATUS_REG_XDA,
LIS3DH_DATAREADY_BIT
val: Byte to be filled with the status bit
* Output : status register BIT
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusBit(u8_t statusBIT, u8_t* val) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_STATUS_REG, &value) )
return MEMS_ERROR;
switch (statusBIT){
case LIS3DH_STATUS_REG_ZYXOR:
if(value &= LIS3DH_STATUS_REG_ZYXOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZOR:
if(value &= LIS3DH_STATUS_REG_ZOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_YOR:
if(value &= LIS3DH_STATUS_REG_YOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_XOR:
if(value &= LIS3DH_STATUS_REG_XOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZYXDA:
if(value &= LIS3DH_STATUS_REG_ZYXDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZDA:
if(value &= LIS3DH_STATUS_REG_ZDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_YDA:
if(value &= LIS3DH_STATUS_REG_YDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_XDA:
if(value &= LIS3DH_STATUS_REG_XDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetAccAxesRaw
* Description : Read the Acceleration Values Output Registers
* Input : buffer to empity by AxesRaw_t Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetAccAxesRaw(AxesRaw_t* buff) {
i16_t value;
u8_t *valueL = (u8_t *)(&value);
u8_t *valueH = ((u8_t *)(&value)+1);
if( !LIS3DH_ReadReg(LIS3DH_OUT_X_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_X_H, valueH) )
return MEMS_ERROR;
buff->AXIS_X = value;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Y_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Y_H, valueH) )
return MEMS_ERROR;
buff->AXIS_Y = value;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Z_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Z_H, valueH) )
return MEMS_ERROR;
buff->AXIS_Z = value;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetInt1Src
* Description : Reset Interrupt 1 Latching function
* Input : Char to empty by Int1 source value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetInt1Src(u8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetInt1SrcBit
* Description : Reset Interrupt 1 Latching function
* Input : statusBIT: LIS3DH_INT_SRC_IA, LIS3DH_INT_SRC_ZH, LIS3DH_INT_SRC_ZL.....
* val: Byte to be filled with the status bit
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetInt1SrcBit(u8_t statusBIT, u8_t* val) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_INT1_SRC_IA){
if(value &= LIS3DH_INT1_SRC_IA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_ZH){
if(value &= LIS3DH_INT1_SRC_ZH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_ZL){
if(value &= LIS3DH_INT1_SRC_ZL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_YH){
if(value &= LIS3DH_INT1_SRC_YH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_YL){
if(value &= LIS3DH_INT1_SRC_YL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_XH){
if(value &= LIS3DH_INT1_SRC_XH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_XL){
if(value &= LIS3DH_INT1_SRC_XL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceReg
* Description : Read Fifo source Register
* Input : Byte to empty by FIFO source register value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceReg(u8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceBit
* Description : Read Fifo WaterMark source bit
* Input : statusBIT: LIS3DH_FIFO_SRC_WTM, LIS3DH_FIFO_SRC_OVRUN, LIS3DH_FIFO_SRC_EMPTY
* val: Byte to fill with the bit value
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceBit(u8_t statusBIT, u8_t* val){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_FIFO_SRC_WTM){
if(value &= LIS3DH_FIFO_SRC_WTM){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_FIFO_SRC_OVRUN){
if(value &= LIS3DH_FIFO_SRC_OVRUN){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_FIFO_SRC_EMPTY){
if(value &= statusBIT == LIS3DH_FIFO_SRC_EMPTY){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceFSS
* Description : Read current number of unread samples stored in FIFO
* Input : Byte to empty by FIFO unread sample value
* Output : None
* Return : Status [value of FSS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceFSS(u8_t* val){
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, &value) )
return MEMS_ERROR;
value &= 0x1F;
*val = value;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetSPIInterface
* Description : Set SPI mode: 3 Wire Interface OR 4 Wire Interface
* Input : LIS3DH_SPI_3_WIRE, LIS3DH_SPI_4_WIRE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetSPIInterface(LIS3DH_SPIMode_t spi) {
u8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xFE;
value |= spi<<LIS3DH_SIM;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/******************* (C) COPYRIGHT 2012 STMicroelectronics *****END OF FILE****/
读写操作函数
#include "lis3dh.h"
#include "stm32f10x_i2c.h"
#include "stm32f10x_exti.h"
#include <stdio.h>
#define I2C2_OWM_ADDRESS7 0x0a
#define I2C_Speed 100000
#define LIS3DH_ADDRESS 0x30
#define EEPROM_Block0_ADDRESS 0xa0
void LIS3DH_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
//时钟初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_Init(GPIOE, &GPIO_InitStructure);
//I2C初始化
I2C_DeInit(I2C2);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = I2C2_OWM_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE );
//中断向量初始化
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//中断引脚配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource15);
EXTI_InitStructure.EXTI_Line = EXTI_Line15;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
void LIS3DH_WriteByte(uint8_t addr, uint8_t data) {
while (I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY));
//起始信号
I2C_GenerateSTART(I2C2, ENABLE);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT));
//写器件地址
I2C_Send7bitAddress(I2C2, LIS3DH_ADDRESS, I2C_Direction_Transmitter);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
//写寄存器地址
I2C_SendData(I2C2, addr);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
//写数据
I2C_SendData(I2C2, data);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
//停止信号
I2C_GenerateSTOP(I2C2, ENABLE);
}
uint8_t LIS3DH_ReadByte(uint8_t addr) {
uint8_t val = 0;
while (I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY));
I2C_AcknowledgeConfig(I2C2, ENABLE);
//起始信号
I2C_GenerateSTART(I2C2, ENABLE);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT));
//写器件地址
I2C_Send7bitAddress(I2C2, LIS3DH_ADDRESS, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
//写寄存器地址
I2C_SendData(I2C2, addr);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
//起始信号
I2C_GenerateSTART(I2C2, ENABLE);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT));
//写器件地址、读模式
I2C_Send7bitAddress(I2C2, LIS3DH_ADDRESS, I2C_Direction_Receiver);
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
//读取数据
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED));
val = I2C_ReceiveData(I2C2);
I2C_AcknowledgeConfig(I2C2, DISABLE);
//停止信号
I2C_GenerateSTOP(I2C2, ENABLE);
return val;
}
/******************** (C) COPYRIGHT 2012 STMicroelectronics ********************
* File Name : LIS3DH_driver.c
* Author : MSH Application Team
* Author : Fabio Tota
* Version : $Revision:$
* Date : $Date:$
* Description : LIS3DH driver file
*
* HISTORY:
* Date | Modification | Author
* 24/06/2011 | Initial Revision | Fabio Tota
* 11/06/2012 | Support for multiple drivers in the same program | Abhishek Anand
********************************************************************************
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
* AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
* INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
* CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
* INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* THIS SOFTWARE IS SPECIFICALLY DESIGNED FOR EXCLUSIVE USE WITH ST PARTS.
*
*******************************************************************************/
/* Includes ------------------------------------------------------------------*/
#include "lis3dh_driver_spi.h"
#include "spi.h"
#include "delay.h"
#include "usart.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
//可以使用该函数为主函数
//int main(void)
//{
// delay_init(); //延时函数初始化
// uart_init(115200); //串口初始化为115200
// SPI1_Init();
// LIS3DH_Init();
// delay_ms(100);
// while(1)
// {
// LIS3DH_Data_Init();
// delay_ms(1000);
// }
//
//}
//SPI1初始化
void SPI1_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1|RCC_APB2Periph_GPIOA, ENABLE);
//GPIO口配置设置//
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*Configure PA.4(NSS)--------------------------------------------*/
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
//SPI1_MISO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* SPI1 configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位数据
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;//SPI_CPOL_High=模式3,时钟空闲为高 //SPI_CPOL_Low=模式0,时钟空闲为低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//SPI_CPHA_2Edge;//SPI_CPHA_1Edge, SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;//SPI_NSS_Soft;//SPI_NSS_Hard
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;//SPI_BaudRatePrescaler_2=32M;//SPI_BaudRatePrescaler_4=18MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;//数据从高位开始发送
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
SPI1_ReadWriteByte(0xff);//启动传输
SPI1_SetSpeed(SPI_BaudRatePrescaler_2);//设置为18M时钟,高速模式
}
//SPI 速度设置函数
//SpeedSet:
//SPI_BaudRatePrescaler_2 2分频
//SPI_BaudRatePrescaler_8 8分频
//SPI_BaudRatePrescaler_16 16分频
//SPI_BaudRatePrescaler_256 256分频
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));
SPI1->CR1&=0XFFC7;
SPI1->CR1|=SPI_BaudRatePrescaler; //设置SPI1速度
SPI_Cmd(SPI1,ENABLE);
}
//SPIx 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //等待SPI发送标志位空
{
retry++;
if(retry>200)return 0;
}
SPI_I2S_SendData(SPI1, TxData); //发送数据
retry=0;
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET) //等待SPI接收标志位空
{
retry++;
if(retry>200)return 0;
}
return SPI_I2S_ReceiveData(SPI1); //接收数据
// SPI_I2S_ClearFlag(SPI1,SPI_I2S_FLAG_RXNE);
}
void LIS3DH_Init()
{
//set ODR (turn ON device)
LIS3DH_SetODR(LIS3DH_ODR_100Hz);
//set PowerMode
LIS3DH_SetMode(LIS3DH_NORMAL);
//set Fullscale
LIS3DH_SetFullScale(LIS3DH_FULLSCALE_2);
//set axis Enable
LIS3DH_SetAxis(LIS3DH_X_ENABLE | LIS3DH_Y_ENABLE | LIS3DH_Z_ENABLE);
}
void LIS3DH_Data_Init()
{
//uint8_t buffer[26];
AxesRaw_t data;
uint8_t response;
uint8_t lisid;
uint8_t lisidtemp;
// Read ID
LIS3DH_GetWHO_AM_I(&lisidtemp);
lisid=(uint16_t)lisidtemp;
printf("LIS3DH ID: %x \r\n",lisid);
//get Acceleration Raw data
response=LIS3DH_GetAccAxesRaw(&data);
//print data values
delay_us(10);
if(response==1)
{
printf("传感器原始值:x=%d, y=%d, z=%d\r\n", data.AXIS_X, data.AXIS_Y, data.AXIS_Z);
printf( "处理后的加速度值Accel:[x]%dmg,[y]%dmg,[z]%dmg\r\n",
(int16_t)((float)data.AXIS_X*4/65536*1000),
(int16_t)((float)data.AXIS_Y*4/65536*1000),
(int16_t)((float)data.AXIS_Z*4/65536*1000));
}
}
//SPI1读函数
u8 LIS3DH_SPI_Read(u8 Reg)
{
u8 temp;
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
delay_us(1);
SPI1_ReadWriteByte(Reg|0x80);//&0xbf
temp = SPI1_ReadWriteByte(0xff);
delay_us(1);
GPIO_SetBits(GPIOA,GPIO_Pin_4);
return temp;
}
//SPI1写函数
void LIS3DH_SPI_Write(u8 WriteAddr,u8 Data)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
delay_us(1);
SPI1_ReadWriteByte(WriteAddr&0x7f);
SPI1_ReadWriteByte(Data);
delay_us(1);
GPIO_SetBits(GPIOA,GPIO_Pin_4);
}
/*******************************************************************************
* Function Name : LIS3DH_ReadReg
* Description : Generic Reading function. It must be fullfilled with either
* : I2C or SPI reading functions
* Input : Register Address
* Output : Data REad
* Return : None
*******************************************************************************/
uint8_t LIS3DH_ReadReg(uint8_t Reg, uint8_t* Data) {
//To be completed with either I2c or SPI reading function
//i.e. *Data = SPI_Mems_Read_Reg( Reg );
*Data = LIS3DH_SPI_Read(Reg);
return 1;
}
/*******************************************************************************
* Function Name : LIS3DH_WriteReg
* Description : Generic Writing function. It must be fullfilled with either
* : I2C or SPI writing function
* Input : Register Address, Data to be written
* Output : None
* Return : None
*******************************************************************************/
uint8_t LIS3DH_WriteReg(uint8_t WriteAddr, uint8_t Data) {
//To be completed with either I2c or SPI writing function
//i.e. SPI_Mems_Write_Reg(WriteAddr, Data);
LIS3DH_SPI_Write(WriteAddr,Data);
return 1;
}
/* Private functions ---------------------------------------------------------*/
/*******************************************************************************
* Function Name : LIS3DH_GetWHO_AM_I
* Description : Read identification code by WHO_AM_I register
* Input : Char to empty by Device identification Value
* Output : None
* Return : Status [value of FSS]
*******************************************************************************/
status_t LIS3DH_GetWHO_AM_I(uint8_t* val){
if( !LIS3DH_ReadReg(LIS3DH_WHO_AM_I, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusAUX
* Description : Read the AUX status register
* Input : Char to empty by status register buffer
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusAUX(uint8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_STATUS_AUX, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusAUXBIT
* Description : Read the AUX status register BIT
* Input : LIS3DH_STATUS_AUX_321OR, LIS3DH_STATUS_AUX_3OR, LIS3DH_STATUS_AUX_2OR, LIS3DH_STATUS_AUX_1OR,
LIS3DH_STATUS_AUX_321DA, LIS3DH_STATUS_AUX_3DA, LIS3DH_STATUS_AUX_2DA, LIS3DH_STATUS_AUX_1DA
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusAUXBit(uint8_t statusBIT, uint8_t* val) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_STATUS_AUX, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_STATUS_AUX_321OR){
if(value &= LIS3DH_STATUS_AUX_321OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_3OR){
if(value &= LIS3DH_STATUS_AUX_3OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_2OR){
if(value &= LIS3DH_STATUS_AUX_2OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_1OR){
if(value &= LIS3DH_STATUS_AUX_1OR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_321DA){
if(value &= LIS3DH_STATUS_AUX_321DA) {
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_3DA){
if(value &= LIS3DH_STATUS_AUX_3DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_2DA){
if(value &= LIS3DH_STATUS_AUX_2DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_STATUS_AUX_1DA){
if(value &= LIS3DH_STATUS_AUX_1DA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_SetODR
* Description : Sets LIS3DH Output Data Rate
* Input : Output Data Rate
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetODR(LIS3DH_ODR_t ov){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
value &= 0x0f;
value |= ov<<LIS3DH_ODR_BIT;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetTemperature
* Description : Sets LIS3DH Output Temperature
* Input : MEMS_ENABLE, MEMS_DISABLE
* Output : None
* Note : For Read Temperature by LIS3DH_OUT_AUX_3, LIS3DH_SetADCAux and LIS3DH_SetBDU
functions must be ENABLE
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetTemperature(State_t state){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_TEMP_CFG_REG, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= state<<LIS3DH_TEMP_EN;
if( !LIS3DH_WriteReg(LIS3DH_TEMP_CFG_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetADCAux
* Description : Sets LIS3DH Output ADC
* Input : MEMS_ENABLE, MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetADCAux(State_t state){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_TEMP_CFG_REG, &value) )
return MEMS_ERROR;
value &= 0x7F;
value |= state<<LIS3DH_ADC_PD;
if( !LIS3DH_WriteReg(LIS3DH_TEMP_CFG_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetAuxRaw
* Description : Read the Aux Values Output Registers
* Input : Buffer to empty
* Output : Aux Values Registers buffer
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetAuxRaw(LIS3DH_Aux123Raw_t* buff) {
uint8_t valueL;
uint8_t valueH;
if( !LIS3DH_ReadReg(LIS3DH_OUT_1_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_1_H, &valueH) )
return MEMS_ERROR;
buff->AUX_1 = (uint16_t)( (valueH << 8) | valueL )/16;
if( !LIS3DH_ReadReg(LIS3DH_OUT_2_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_2_H, &valueH) )
return MEMS_ERROR;
buff->AUX_2 = (uint16_t)( (valueH << 8) | valueL )/16;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_H, &valueH) )
return MEMS_ERROR;
buff->AUX_3 = (uint16_t)( (valueH << 8) | valueL )/16;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetTempRaw
* Description : Read the Temperature Values by AUX Output Registers OUT_3_H
* Input : Buffer to empty
* Output : Temperature Values Registers buffer
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetTempRaw(int8_t* buff) {
uint8_t valueL;
uint8_t valueH;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_L, &valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_3_H, &valueH) )
return MEMS_ERROR;
*buff = (int8_t)( valueH );
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetMode
* Description : Sets LIS3DH Operating Mode
* Input : Modality (LIS3DH_NORMAL, LIS3DH_LOW_POWER, LIS3DH_POWER_DOWN)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetMode(LIS3DH_Mode_t md) {
uint8_t value;
uint8_t value2;
static uint8_t ODR_old_value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value2) )
return MEMS_ERROR;
if((value & 0xF0)==0)
value = value | (ODR_old_value & 0xF0); //if it comes from POWERDOWN
switch(md) {
case LIS3DH_POWER_DOWN:
ODR_old_value = value;
value &= 0x0F;
break;
case LIS3DH_NORMAL:
value &= 0xF7;
value |= (MEMS_RESET<<LIS3DH_LPEN);
value2 &= 0xF7;
value2 |= (MEMS_SET<<LIS3DH_HR); //set HighResolution_BIT
break;
case LIS3DH_LOW_POWER:
value &= 0xF7;
value |= (MEMS_SET<<LIS3DH_LPEN);
value2 &= 0xF7;
value2 |= (MEMS_RESET<<LIS3DH_HR); //reset HighResolution_BIT
break;
default:
return MEMS_ERROR;
}
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value2) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetAxis
* Description : Enable/Disable LIS3DH Axis
* Input : LIS3DH_X_ENABLE/DISABLE | LIS3DH_Y_ENABLE/DISABLE | LIS3DH_Z_ENABLE/DISABLE
* Output : None
* Note : You MUST use all input variable in the argument, as example
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetAxis(LIS3DH_Axis_t axis) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG1, &value) )
return MEMS_ERROR;
value &= 0xF8;
value |= (0x07 & axis);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG1, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetFullScale
* Description : Sets the LIS3DH FullScale
* Input : LIS3DH_FULLSCALE_2/LIS3DH_FULLSCALE_4/LIS3DH_FULLSCALE_8/LIS3DH_FULLSCALE_16
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetFullScale(LIS3DH_Fullscale_t fs) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xCF;
value |= (fs<<LIS3DH_FS);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetBDU
* Description : Enable/Disable Block Data Update Functionality
* Input : ENABLE/DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetBDU(State_t bdu) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0x7F;
value |= (bdu<<LIS3DH_BDU);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetBLE
* Description : Set Endianess (MSB/LSB)
* Input : BLE_LSB / BLE_MSB
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetBLE(LIS3DH_Endianess_t ble) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= (ble<<LIS3DH_BLE);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetSelfTest
* Description : Set Self Test Modality
* Input : LIS3DH_SELF_TEST_DISABLE/ST_0/ST_1
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetSelfTest(LIS3DH_SelfTest_t st) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xF9;
value |= (st<<LIS3DH_ST);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFClick
* Description : Enable/Disable High Pass Filter for click
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFClickEnable(State_t hpfe) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFB;
value |= (hpfe<<LIS3DH_HPCLICK);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFAOI1
* Description : Enable/Disable High Pass Filter for AOI on INT_1
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFAOI1Enable(State_t hpfe) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFE;
value |= (hpfe<<LIS3DH_HPIS1);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_HPFAOI2
* Description : Enable/Disable High Pass Filter for AOI on INT_2
* Input : MEMS_ENABLE/MEMS_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_HPFAOI2Enable(State_t hpfe) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xFD;
value |= (hpfe<<LIS3DH_HPIS2);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetHPFMode
* Description : Set High Pass Filter Modality
* Input : LIS3DH_HPM_NORMAL_MODE_RES/LIS3DH_HPM_REF_SIGNAL/
LIS3DH_HPM_NORMAL_MODE/LIS3DH_HPM_AUTORESET_INT
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetHPFMode(LIS3DH_HPFMode_t hpm) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0x3F;
value |= (hpm<<LIS3DH_HPM);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetHPFCutOFF
* Description : Set High Pass CUT OFF Freq
* Input : HPFCF [0,3]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetHPFCutOFF(LIS3DH_HPFCutOffFreq_t hpf) {
uint8_t value;
if (hpf > 3)
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xCF;
value |= (hpf<<LIS3DH_HPCF);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetFilterDataSel
* Description : Set Filter Data Selection bypassed or sent to FIFO OUT register
* Input : MEMS_SET, MEMS_RESET
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetFilterDataSel(State_t state) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG2, &value) )
return MEMS_ERROR;
value &= 0xF7;
value |= (state<<LIS3DH_FDS);
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG2, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Pin
* Description : Set Interrupt1 pin Function
* Input : LIS3DH_CLICK_ON_PIN_INT1_ENABLE/DISABLE | LIS3DH_I1_INT1_ON_PIN_INT1_ENABLE/DISABLE |
LIS3DH_I1_INT2_ON_PIN_INT1_ENABLE/DISABLE | LIS3DH_I1_DRDY1_ON_INT1_ENABLE/DISABLE |
LIS3DH_I1_DRDY2_ON_INT1_ENABLE/DISABLE | LIS3DH_WTM_ON_INT1_ENABLE/DISABLE |
LIS3DH_INT1_OVERRUN_ENABLE/DISABLE
* example : SetInt1Pin(LIS3DH_CLICK_ON_PIN_INT1_ENABLE | LIS3DH_I1_INT1_ON_PIN_INT1_ENABLE |
LIS3DH_I1_INT2_ON_PIN_INT1_DISABLE | LIS3DH_I1_DRDY1_ON_INT1_ENABLE | LIS3DH_I1_DRDY2_ON_INT1_ENABLE |
LIS3DH_WTM_ON_INT1_DISABLE | LIS3DH_INT1_OVERRUN_DISABLE )
* Note : To enable Interrupt signals on INT1 Pad (You MUST use all input variable in the argument, as example)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Pin(LIS3DH_IntPinConf_t pinConf) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG3, &value) )
return MEMS_ERROR;
value &= 0x00;
value |= pinConf;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG3, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt2Pin
* Description : Set Interrupt2 pin Function
* Input : LIS3DH_CLICK_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_INT1_ON_PIN_INT2_ENABLE/DISABLE |
LIS3DH_I2_INT2_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_BOOT_ON_INT2_ENABLE/DISABLE |
LIS3DH_INT_ACTIVE_HIGH/LOW
* example : LIS3DH_SetInt2Pin(LIS3DH_CLICK_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_INT1_ON_PIN_INT2_ENABLE/DISABLE |
LIS3DH_I2_INT2_ON_PIN_INT2_ENABLE/DISABLE | LIS3DH_I2_BOOT_ON_INT2_ENABLE/DISABLE |
LIS3DH_INT_ACTIVE_HIGH/LOW)
* Note : To enable Interrupt signals on INT2 Pad (You MUST use all input variable in the argument, as example)
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt2Pin(LIS3DH_IntPinConf_t pinConf) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG6, &value) )
return MEMS_ERROR;
value &= 0x00;
value |= pinConf;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG6, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickCFG
* Description : Set Click Interrupt config Function
* Input : LIS3DH_ZD_ENABLE/DISABLE | LIS3DH_ZS_ENABLE/DISABLE | LIS3DH_YD_ENABLE/DISABLE |
LIS3DH_YS_ENABLE/DISABLE | LIS3DH_XD_ENABLE/DISABLE | LIS3DH_XS_ENABLE/DISABLE
* example : LIS3DH_SetClickCFG( LIS3DH_ZD_ENABLE | LIS3DH_ZS_DISABLE | LIS3DH_YD_ENABLE |
LIS3DH_YS_DISABLE | LIS3DH_XD_ENABLE | LIS3DH_XS_ENABLE)
* Note : You MUST use all input variable in the argument, as example
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickCFG(uint8_t status) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CLICK_CFG, &value) )
return MEMS_ERROR;
value &= 0xC0;
value |= status;
if( !LIS3DH_WriteReg(LIS3DH_CLICK_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickTHS
* Description : Set Click Interrupt threshold
* Input : Click-click Threshold value [0-127]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickTHS(uint8_t ths) {
if(ths>127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CLICK_THS, ths) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickLIMIT
* Description : Set Click Interrupt Time Limit
* Input : Click-click Time Limit value [0-127]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickLIMIT(uint8_t t_limit) {
if(t_limit>127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_TIME_LIMIT, t_limit) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickLATENCY
* Description : Set Click Interrupt Time Latency
* Input : Click-click Time Latency value [0-255]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickLATENCY(uint8_t t_latency) {
if( !LIS3DH_WriteReg(LIS3DH_TIME_LATENCY, t_latency) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetClickWINDOW
* Description : Set Click Interrupt Time Window
* Input : Click-click Time Window value [0-255]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetClickWINDOW(uint8_t t_window) {
if( !LIS3DH_WriteReg(LIS3DH_TIME_WINDOW, t_window) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetClickResponse
* Description : Get Click Interrupt Response by CLICK_SRC REGISTER
* Input : char to empty by Click Response Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetClickResponse(uint8_t* res) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CLICK_SRC, &value) )
return MEMS_ERROR;
value &= 0x7F;
if((value & LIS3DH_IA)==0) {
*res = LIS3DH_NO_CLICK;
return MEMS_SUCCESS;
}
else {
if (value & LIS3DH_DCLICK){
if (value & LIS3DH_CLICK_SIGN){
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_DCLICK_Z_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_DCLICK_Y_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_DCLICK_X_N;
return MEMS_SUCCESS;
}
}
else{
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_DCLICK_Z_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_DCLICK_Y_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_DCLICK_X_P;
return MEMS_SUCCESS;
}
}
}
else{
if (value & LIS3DH_CLICK_SIGN){
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_SCLICK_Z_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_SCLICK_Y_N;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_SCLICK_X_N;
return MEMS_SUCCESS;
}
}
else{
if (value & LIS3DH_CLICK_Z) {
*res = LIS3DH_SCLICK_Z_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_Y) {
*res = LIS3DH_SCLICK_Y_P;
return MEMS_SUCCESS;
}
if (value & LIS3DH_CLICK_X) {
*res = LIS3DH_SCLICK_X_P;
return MEMS_SUCCESS;
}
}
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_Int1LatchEnable
* Description : Enable Interrupt 1 Latching function
* Input : ENABLE/DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_Int1LatchEnable(State_t latch) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xF7;
value |= latch<<LIS3DH_LIR_INT1;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_ResetInt1Latch
* Description : Reset Interrupt 1 Latching function
* Input : None
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_ResetInt1Latch(void) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetIntConfiguration
* Description : Interrupt 1 Configuration (without LIS3DH_6D_INT)
* Input : LIS3DH_INT1_AND/OR | LIS3DH_INT1_ZHIE_ENABLE/DISABLE | LIS3DH_INT1_ZLIE_ENABLE/DISABLE...
* Output : None
* Note : You MUST use all input variable in the argument, as example
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetIntConfiguration(LIS3DH_Int1Conf_t ic) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
value &= 0x40;
value |= ic;
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetIntMode
* Description : Interrupt 1 Configuration mode (OR, 6D Movement, AND, 6D Position)
* Input : LIS3DH_INT_MODE_OR, LIS3DH_INT_MODE_6D_MOVEMENT, LIS3DH_INT_MODE_AND,
LIS3DH_INT_MODE_6D_POSITION
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetIntMode(LIS3DH_Int1Mode_t int_mode) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
value &= 0x3F;
value |= (int_mode<<LIS3DH_INT_6D);
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt6D4DConfiguration
* Description : 6D, 4D Interrupt Configuration
* Input : LIS3DH_INT1_6D_ENABLE, LIS3DH_INT1_4D_ENABLE, LIS3DH_INT1_6D_4D_DISABLE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt6D4DConfiguration(LIS3DH_INT_6D_4D_t ic) {
uint8_t value;
uint8_t value2;
if( !LIS3DH_ReadReg(LIS3DH_INT1_CFG, &value) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value2) )
return MEMS_ERROR;
if(ic == LIS3DH_INT1_6D_ENABLE){
value &= 0xBF;
value |= (MEMS_ENABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_DISABLE<<LIS3DH_D4D_INT1);
}
if(ic == LIS3DH_INT1_4D_ENABLE){
value &= 0xBF;
value |= (MEMS_ENABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_ENABLE<<LIS3DH_D4D_INT1);
}
if(ic == LIS3DH_INT1_6D_4D_DISABLE){
value &= 0xBF;
value |= (MEMS_DISABLE<<LIS3DH_INT_6D);
value2 &= 0xFB;
value2 |= (MEMS_DISABLE<<LIS3DH_D4D_INT1);
}
if( !LIS3DH_WriteReg(LIS3DH_INT1_CFG, value) )
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value2) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_Get6DPosition
* Description : 6D, 4D Interrupt Position Detect
* Input : Byte to empty by POSITION_6D_t Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_Get6DPosition(uint8_t* val){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
value &= 0x7F;
switch (value){
case LIS3DH_UP_SX:
*val = LIS3DH_UP_SX;
break;
case LIS3DH_UP_DX:
*val = LIS3DH_UP_DX;
break;
case LIS3DH_DW_SX:
*val = LIS3DH_DW_SX;
break;
case LIS3DH_DW_DX:
*val = LIS3DH_DW_DX;
break;
case LIS3DH_TOP:
*val = LIS3DH_TOP;
break;
case LIS3DH_BOTTOM:
*val = LIS3DH_BOTTOM;
break;
}
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Threshold
* Description : Sets Interrupt 1 Threshold
* Input : Threshold = [0,31]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Threshold(uint8_t ths) {
if (ths > 127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_INT1_THS, ths) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetInt1Duration
* Description : Sets Interrupt 1 Duration
* Input : Duration value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetInt1Duration(LIS3DH_Int1Conf_t id) {
if (id > 127)
return MEMS_ERROR;
if( !LIS3DH_WriteReg(LIS3DH_INT1_DURATION, id) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_FIFOModeEnable
* Description : Sets Fifo Modality
* Input : LIS3DH_FIFO_DISABLE, LIS3DH_FIFO_BYPASS_MODE, LIS3DH_FIFO_MODE,
LIS3DH_FIFO_STREAM_MODE, LIS3DH_FIFO_TRIGGER_MODE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_FIFOModeEnable(LIS3DH_FifoMode_t fm) {
uint8_t value;
if(fm == LIS3DH_FIFO_DISABLE) {
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1F;
value |= (LIS3DH_FIFO_BYPASS_MODE<<LIS3DH_FM);
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) ) //fifo mode bypass
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo disable
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_BYPASS_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_STREAM_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
if(fm == LIS3DH_FIFO_TRIGGER_MODE) {
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG5, &value) )
return MEMS_ERROR;
value &= 0xBF;
value |= MEMS_SET<<LIS3DH_FIFO_EN;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG5, value) ) //fifo enable
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0x1f;
value |= (fm<<LIS3DH_FM); //fifo mode configuration
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
}
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetTriggerInt
* Description : Trigger event liked to trigger signal INT1/INT2
* Input : LIS3DH_TRIG_INT1/LIS3DH_TRIG_INT2
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetTriggerInt(LIS3DH_TrigInt_t tr) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0xDF;
value |= (tr<<LIS3DH_TR);
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetWaterMark
* Description : Sets Watermark Value
* Input : Watermark = [0,31]
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetWaterMark(uint8_t wtm) {
uint8_t value;
if(wtm > 31)
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_CTRL_REG, &value) )
return MEMS_ERROR;
value &= 0xE0;
value |= wtm;
if( !LIS3DH_WriteReg(LIS3DH_FIFO_CTRL_REG, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusReg
* Description : Read the status register
* Input : char to empty by Status Reg Value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusReg(uint8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_STATUS_REG, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetStatusBIT
* Description : Read the status register BIT
* Input : LIS3DH_STATUS_REG_ZYXOR, LIS3DH_STATUS_REG_ZOR, LIS3DH_STATUS_REG_YOR, LIS3DH_STATUS_REG_XOR,
LIS3DH_STATUS_REG_ZYXDA, LIS3DH_STATUS_REG_ZDA, LIS3DH_STATUS_REG_YDA, LIS3DH_STATUS_REG_XDA,
LIS3DH_DATAREADY_BIT
val: Byte to be filled with the status bit
* Output : status register BIT
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetStatusBit(uint8_t statusBIT, uint8_t* val) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_STATUS_REG, &value) )
return MEMS_ERROR;
switch (statusBIT){
case LIS3DH_STATUS_REG_ZYXOR:
if(value &= LIS3DH_STATUS_REG_ZYXOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZOR:
if(value &= LIS3DH_STATUS_REG_ZOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_YOR:
if(value &= LIS3DH_STATUS_REG_YOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_XOR:
if(value &= LIS3DH_STATUS_REG_XOR){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZYXDA:
if(value &= LIS3DH_STATUS_REG_ZYXDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_ZDA:
if(value &= LIS3DH_STATUS_REG_ZDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_YDA:
if(value &= LIS3DH_STATUS_REG_YDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
case LIS3DH_STATUS_REG_XDA:
if(value &= LIS3DH_STATUS_REG_XDA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetAccAxesRaw
* Description : Read the Acceleration Values Output Registers
* Input : buffer to empity by AxesRaw_t Typedef
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetAccAxesRaw(AxesRaw_t* buff) {
int16_t value;
uint8_t *valueL = (uint8_t *)(&value);
uint8_t *valueH = ((uint8_t *)(&value)+1);
if( !LIS3DH_ReadReg(LIS3DH_OUT_X_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_X_H, valueH) )
return MEMS_ERROR;
buff->AXIS_X = value;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Y_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Y_H, valueH) )
return MEMS_ERROR;
buff->AXIS_Y = value;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Z_L, valueL) )
return MEMS_ERROR;
if( !LIS3DH_ReadReg(LIS3DH_OUT_Z_H, valueH) )
return MEMS_ERROR;
buff->AXIS_Z = value;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetInt1Src
* Description : Reset Interrupt 1 Latching function
* Input : Char to empty by Int1 source value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetInt1Src(uint8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetInt1SrcBit
* Description : Reset Interrupt 1 Latching function
* Input : statusBIT: LIS3DH_INT_SRC_IA, LIS3DH_INT_SRC_ZH, LIS3DH_INT_SRC_ZL.....
* val: Byte to be filled with the status bit
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetInt1SrcBit(uint8_t statusBIT, uint8_t* val) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_INT1_SRC, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_INT1_SRC_IA){
if(value &= LIS3DH_INT1_SRC_IA){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_ZH){
if(value &= LIS3DH_INT1_SRC_ZH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_ZL){
if(value &= LIS3DH_INT1_SRC_ZL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_YH){
if(value &= LIS3DH_INT1_SRC_YH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_YL){
if(value &= LIS3DH_INT1_SRC_YL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_XH){
if(value &= LIS3DH_INT1_SRC_XH){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_INT1_SRC_XL){
if(value &= LIS3DH_INT1_SRC_XL){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceReg
* Description : Read Fifo source Register
* Input : Byte to empty by FIFO source register value
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceReg(uint8_t* val) {
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, val) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceBit
* Description : Read Fifo WaterMark source bit
* Input : statusBIT: LIS3DH_FIFO_SRC_WTM, LIS3DH_FIFO_SRC_OVRUN, LIS3DH_FIFO_SRC_EMPTY
* val: Byte to fill with the bit value
* Output : None
* Return : Status of BIT [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceBit(uint8_t statusBIT, uint8_t* val){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, &value) )
return MEMS_ERROR;
if(statusBIT == LIS3DH_FIFO_SRC_WTM){
if(value &= LIS3DH_FIFO_SRC_WTM){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_FIFO_SRC_OVRUN){
if(value &= LIS3DH_FIFO_SRC_OVRUN){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
if(statusBIT == LIS3DH_FIFO_SRC_EMPTY){
if(value &= statusBIT == LIS3DH_FIFO_SRC_EMPTY){
*val = MEMS_SET;
return MEMS_SUCCESS;
}
else{
*val = MEMS_RESET;
return MEMS_SUCCESS;
}
}
return MEMS_ERROR;
}
/*******************************************************************************
* Function Name : LIS3DH_GetFifoSourceFSS
* Description : Read current number of unread samples stored in FIFO
* Input : Byte to empty by FIFO unread sample value
* Output : None
* Return : Status [value of FSS]
*******************************************************************************/
status_t LIS3DH_GetFifoSourceFSS(uint8_t* val){
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_FIFO_SRC_REG, &value) )
return MEMS_ERROR;
value &= 0x1F;
*val = value;
return MEMS_SUCCESS;
}
/*******************************************************************************
* Function Name : LIS3DH_SetSPIInterface
* Description : Set SPI mode: 3 Wire Interface OR 4 Wire Interface
* Input : LIS3DH_SPI_3_WIRE, LIS3DH_SPI_4_WIRE
* Output : None
* Return : Status [MEMS_ERROR, MEMS_SUCCESS]
*******************************************************************************/
status_t LIS3DH_SetSPIInterface(LIS3DH_SPIMode_t spi) {
uint8_t value;
if( !LIS3DH_ReadReg(LIS3DH_CTRL_REG4, &value) )
return MEMS_ERROR;
value &= 0xFE;
value |= spi<<LIS3DH_SIM;
if( !LIS3DH_WriteReg(LIS3DH_CTRL_REG4, value) )
return MEMS_ERROR;
return MEMS_SUCCESS;
}
/******************* (C) COPYRIGHT 2012 STMicroelectronics *****END OF FILE****/