管程
信号量挺琐碎的,而且容易出错,顺序错了都会影响结果。
管程内的数据只有在管程内的过程(函数)才能访问;一次只允许一个进程进入管程。
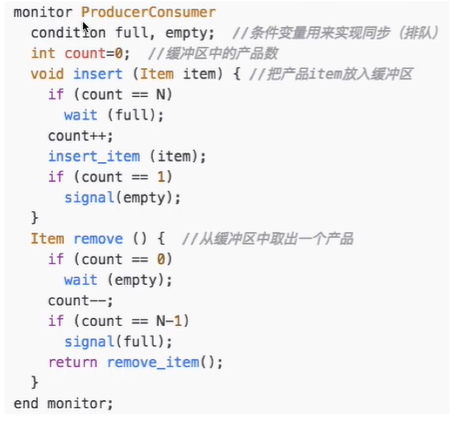
monitor 是 java 语法的管程,每次只允许一个进程访问(互斥),进程只能通过管程提供的特定入口进入。我们可以自己定义逻辑判断,让进程等待或释放(同步)。
关键字 synchronized 修饰的函数同一时间段内只能被一个进程访问。
死锁
A等B,B等C,C等A,都在等对方手里的资源。
和饥饿不一样,饥饿是如果一直来新进程自己可能一直无法继续。
死锁的四个条件:
- 互斥,对某一资源互斥使用。
- 不剥夺,不能抢资源。
- 请求和保持,在新资源还在请求时可以保持自己手里已有的资源。
- 循环等待,存在资源的循环等待链。比如有12两个资源,进程一申请顺序:12,进程二申请顺序:21,两者正好互相锁住。
可能发生死锁的情况:
- 竞争不能共用的系统资源时;
- 进程推进顺序不当;(哲学家拿筷子,都先拿左手的)
- 信号量使用不当(如生产者消费者一例,先互斥锁再信号量锁。生产者先进入满仓库,因为当前只有自己进程进入仓库所以互斥锁不干扰;但是仓库已满,无法放入导致阻塞;消费者又因为生产者正在访问,互斥锁限制导致阻塞)。
预防死锁
破坏四个条件之一。
-
把资源改为可以共享使用的;不过不是所有设备都能强行改的。
-
剥夺:要么如果当前进程资源不足时立刻全部释放资源,等一会再重新运行;要么根据优先级,高优先级抢低优先级的资源使用。但是比较复杂而且会影响前一个进程,常用于易于保存和恢复状态的进程(如 CPU);效率低;方案一还可能导致饥饿。
-
请求保持:采用静态分配方法,进程开始运行时就把所有需要的资源都给他,全程让他运行。但是可能有的资源这个进程就用一两下,一直占着会比较浪费;可能导致饥饿。
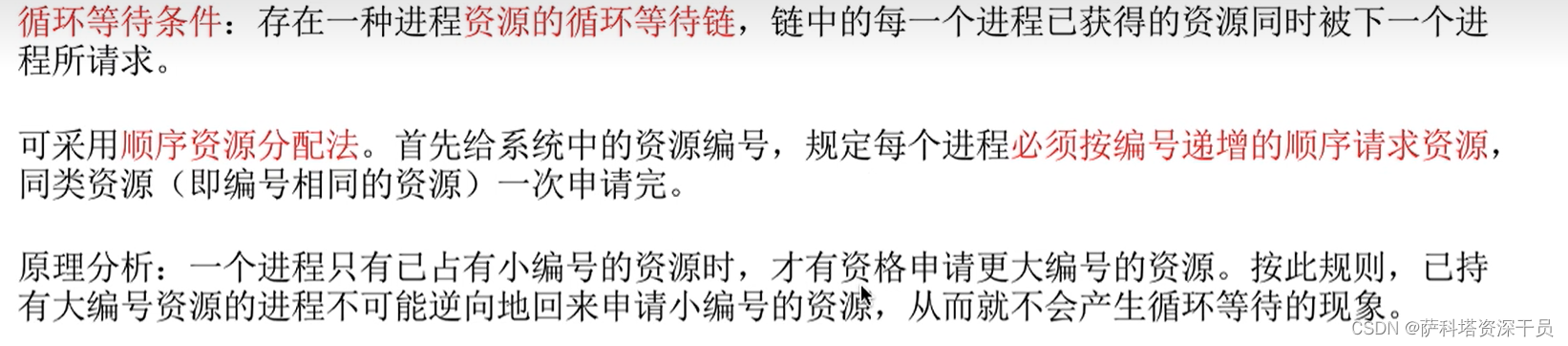
比如上例,两个进程申请资源顺序都从小到大,先1后2,就不会死锁了。但是实际资源使用顺序可能并不是从小到大,效率低;而且增添设备要修改编号,不方便;而且用户编程要注意顺序,比较费事。
避免死锁
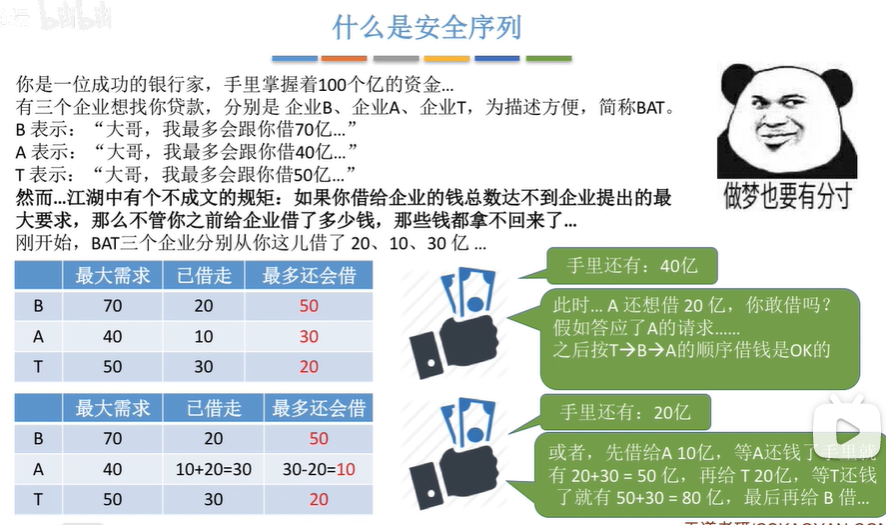
安全序列就是按某种顺序分配资源,所有进程都能顺利得到,不会死锁。存在一种安全序列的情况,那么当前系统就是处于安全状态。
银行家算法:
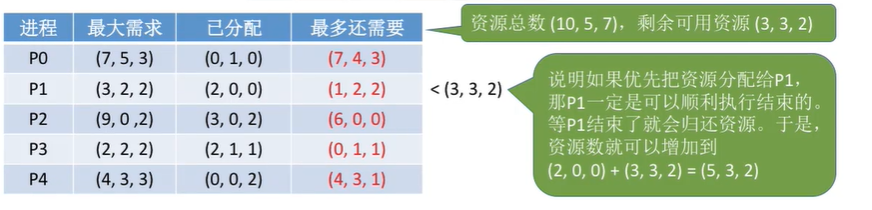
如图,剩余资源 (3, 3, 2),视作一个一维数组。P0 全分配也不够,不行;P1可以,全分配给P1后P1归还资源,剩余资源数变成 (5, 3, 2);然后P2不够,P3可以,变成 (7, 4, 3);p4 变成 (7, 4, 5); P1 变成 (7, 5, 5),最后 P2 P4,五轮循环全部分配。
最大需求:Max
已分配:Allocation
最多还需要:Need
当次发起申请的请求量:Request
Request≥Need:出错了
Request≤Available:说明有多余空闲。系统先尝试分配一下,成功后证明安全,正式分配。
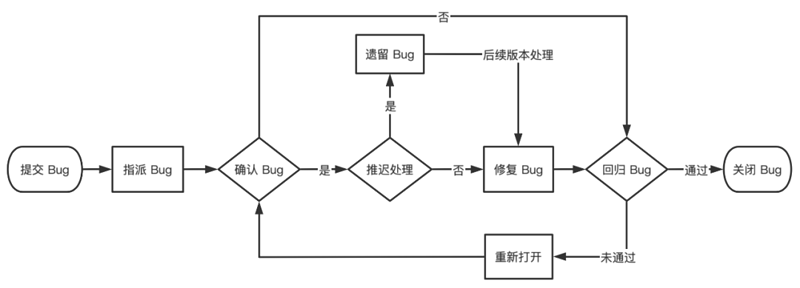
检测、消除死锁
点表示进程,方框表示资源,箭头表示分配。如果所有箭头都能被顺利消除,证明不会发生死锁。
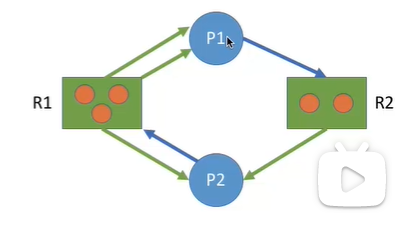
P1向R2要一个。R2给了P2一个自己还剩下一个,所以可以要到。(P1释放后,就能把P1的所有边去掉了)
P2向R1要一个。但是R1三个都给出去了,所以P2要不到,阻塞了。
P1运行完释放,R1里就有两个空闲的了,P2就能要到了。
下例就没法全部消除,死锁了。只有P3能正常运行并释放。
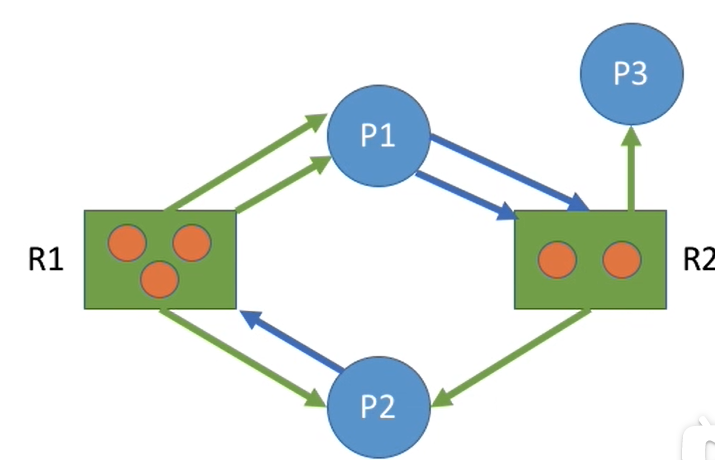
解决办法:可以挂起或终止死锁的部分节点,或者回退到没有发生死锁的断点。
内存
存放数据的硬件,程序要先被放到内存中才能被处理.
代码被编译成指令,通常还会涉及到几个地址。比如一个加法指令涉及的三部分(A,B,C)A代表:这是一个加法指令;B C代表:把B中的数据加到C中。
指令中采取的是相对的逻辑地址,因为还不能确定物理存到了哪里。
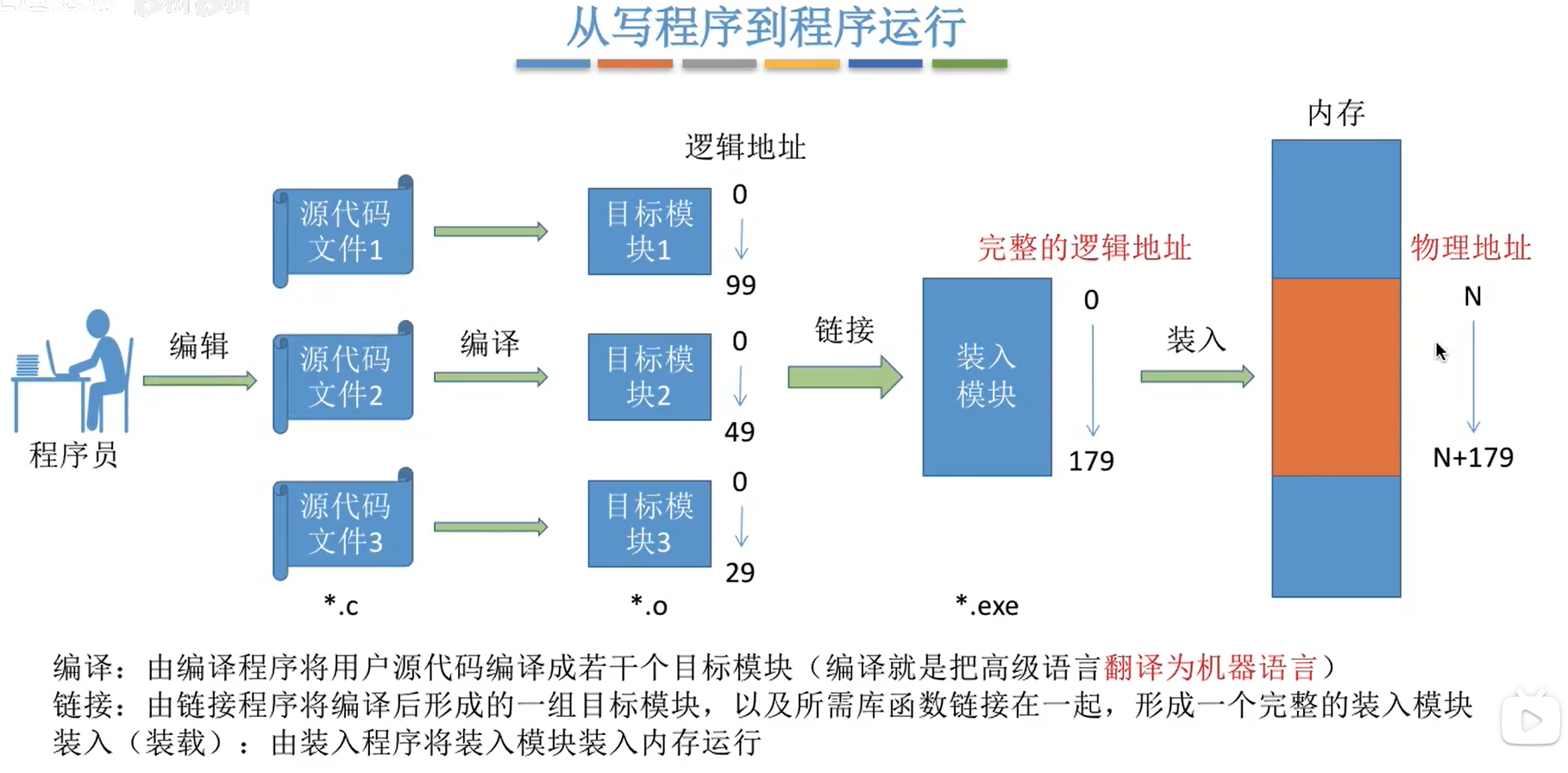
装入有三种:
- 绝对装入,编译时就知道要放到哪个物理地址里,编译时直接采用物理地址;适用于单道程序环境。
- 静态重定位装入,编译时采用相对地址,装入时根据相对地址存入到物理地址。但是如果内存中容量不够,就不能装入。用于早期操作系统。
- 动态重定位装入,刚进内存不会装入,等到程序运行时再装入。允许程序运行中在内存里移动。现代操作系统。
链接也有三种,装入前链接成一块,边装入边链接,运行时再链接。
内存管理
内存中存了多少?空闲多少?进程分配到哪里?怎么释放?内存扩充(游戏60G,内存4G,采用虚拟内存的方式扩充)、地址转换(就是装入。逻辑地址和物理地址之间的链接 是操作系统解决,程序员不用管)、内存保护。
覆盖与交换技术
覆盖技术:解决内存太小的问题。内存中分固定区和覆盖区。
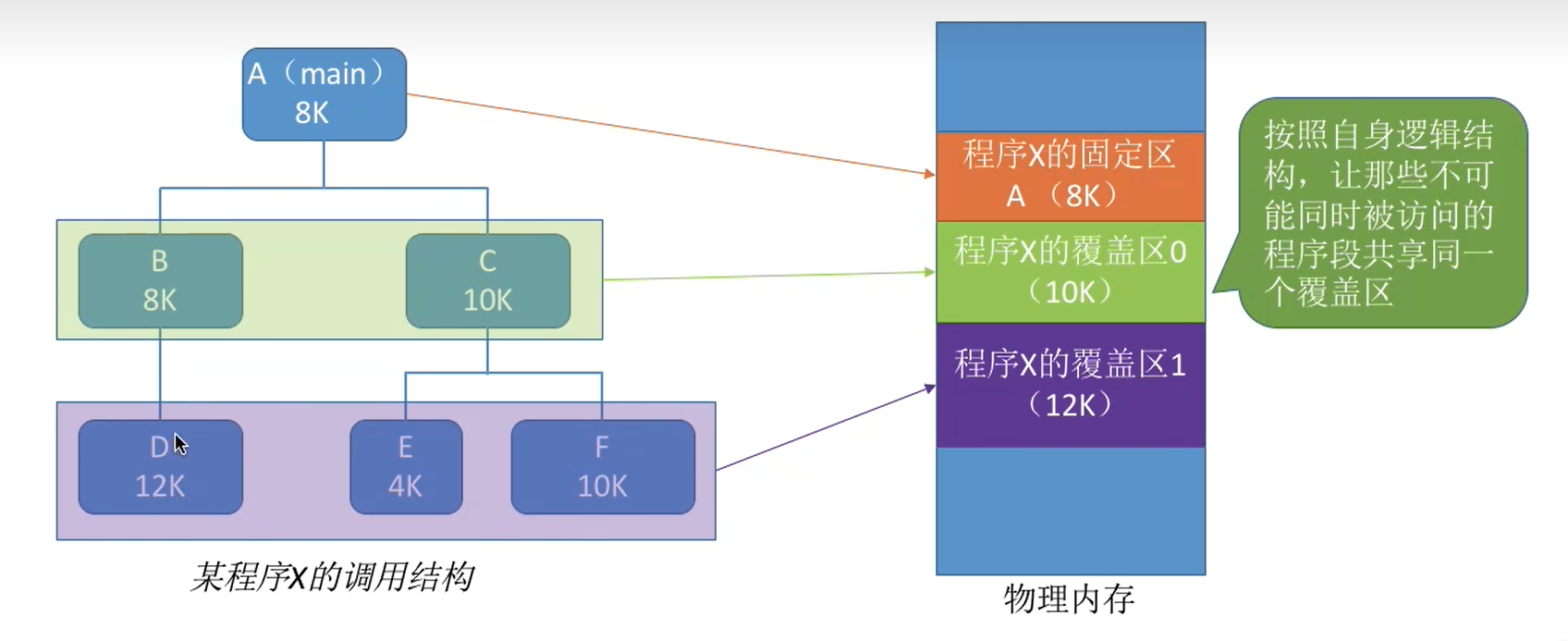
缺点在于固定区覆盖区要程序员自己规定,不透明。
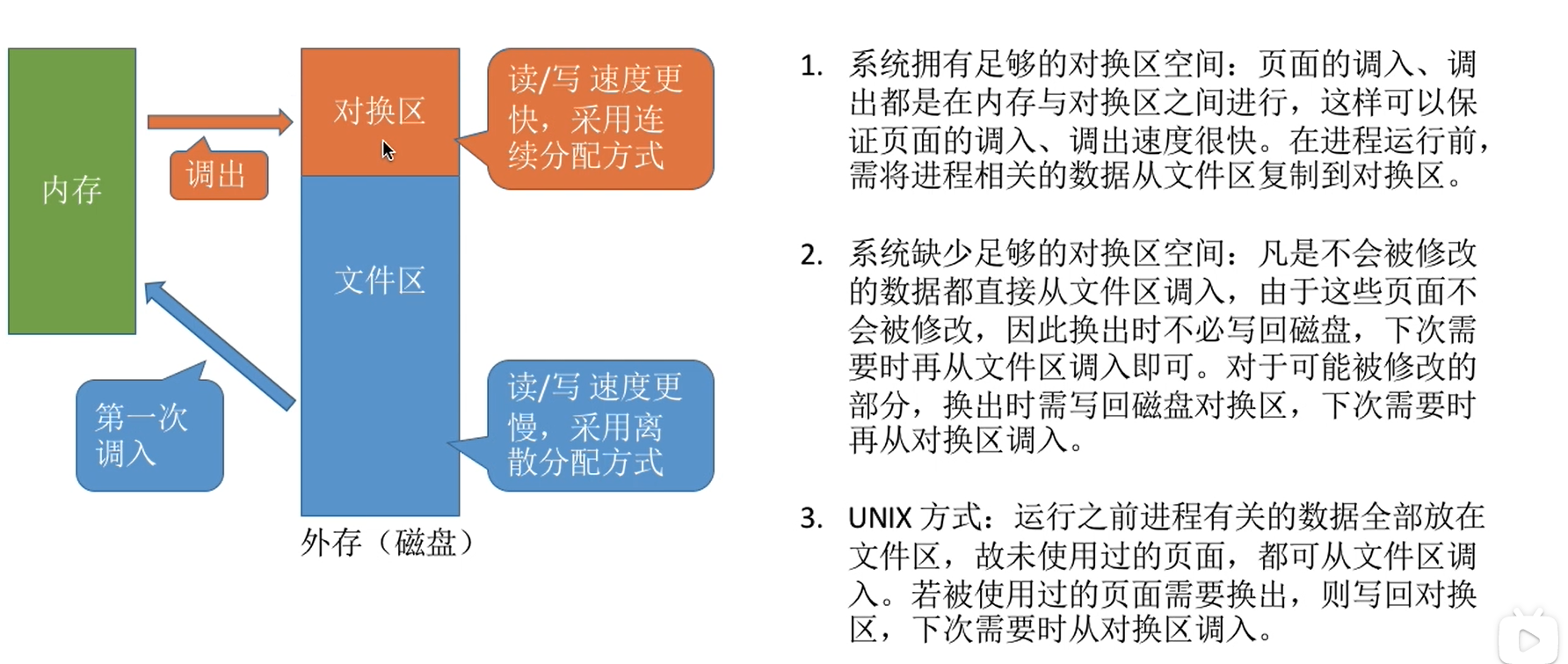
交换技术:把内存中某些进程拿出来,再把某些进程换进去。磁盘中专门有一块交换区,追求交换的速度,采用连续存储方式,IO 比文件区要快得多。缺页率高时换出得多。优先换出阻塞和优先级低的进程。
覆盖是同一个进程中的,交换是多个进程中的。
内存保护限制每个进程只能访问自己范围内的数据。可以设置上下限寄存器;或者重定向寄存器决定上限,界地址寄存器代表最大长度。
内存分配
连续分配:内存分为系统区和用户区。系统区存放操作系统相关数据;用户区存进程,只能存一个。实现简单,没有外部碎片(内存空闲区域太小,没法分配给进程的情况),可以通过覆盖技术扩大内存,不一定要保护;但是利用率低,而且有内部碎片(分配给某个进程的内存区域,有些部分没有用到)。
固定分区分配:内存分成很多个分区,每个分区只装一道作业。
(分区大小相等,缺乏灵活性,但是适用于一台计算机控制多个相同对象的场合;
也可以设置不同大小的分区,适用于各种作业)
操作系统需要叫分区说明表的数据结构,让内核程序知道哪些分区可用不可用,起始位置,大小等。没有外部碎片,但是有内部碎片;而且可能有过大的用户程序,所有分区都满足不了,就只能覆盖,降低效率。
动态分区分配:根据进程大小动态建立分区。系统区大小都是不固定的。可以采取空闲表或空闲链的数据结构存储信息。
动态分配的算法:
- 要插入的进程比空闲区小:更新空闲区起始位置和大小。
- 要插入的进程和空闲区一样大:直接在空闲分区表中删掉这一条空闲区的记录。
动态分区回收算法
- 要回收的分区前面或后面有一块空闲:更新那块空闲的起始位置和大小。
- 前后没有空闲:新增一条空闲记录。
- 前后都有空闲:空闲表中两条记录 更新成一整条。
动态分配算法 没有内部碎片,但有外部碎片。可以通过“拼凑”来解决。
具体怎么选择空闲分区分配?
动态分区分配算法
首次适应算法:从小地址到大逐渐找。空闲区按地址从小到大存储在空闲链中。
最佳适应算法:优先找能容得下的最小的空闲区,大的留着给大的进程预备着。空闲分区从小到大存储在空闲链中。小碎片会越来越多,导致外部碎片。
最坏适应算法:优先使用最大的空闲分区,避免外部碎片。但是大进程到来的时候可能插入不进来了。
临近适应算法:因为首次适应算法每次都从头找,头部可能有很多小碎片,每次又要遍历。临近适应算法每次从上次结束的地方开始查找。也是优先使用最大分区,类似最坏适应算法。
基本分页存储算法
是一种非连续分配。
每个分区10MB,A进程23MB,可以拆成10+10+3MB存储。
但是这样导致第三个分区内部碎片达到7MB。如果分区大小为2MB,那么只有最后一个分区有1MB内部碎片。
每个分区是一个页框,有页框号,从0开始。把进程分配成页框的大小,叫做一个个页,有页号。
分的页并不是连续存储在分区中的,可以不连续存储,根据逻辑地址找页与页之间的关系。
页号:逻辑地址/页面长度。
偏移量:逻辑地址%页面长度。
如第80个内存单元,页面长度50,那么页号=1,偏移量=30.
如果页面大小是2的整数次幂,那么页面范围就是00000……0001000……0000到00000……00010111……11111,末尾的部分就是页面偏移量。
页表存储页面信息,页表项包含页号和块号信息,每个页表项应该能表示出所有块数的信息。比如有2^20个块,则每个页表项要有20种状态,20位即至少三个字节。(但是通常采用4个字节 这样让总内存数可以等于证书个页表项)
基本地址变换机构
用于实现分页管理逻辑地址转变为物理地址的操作。
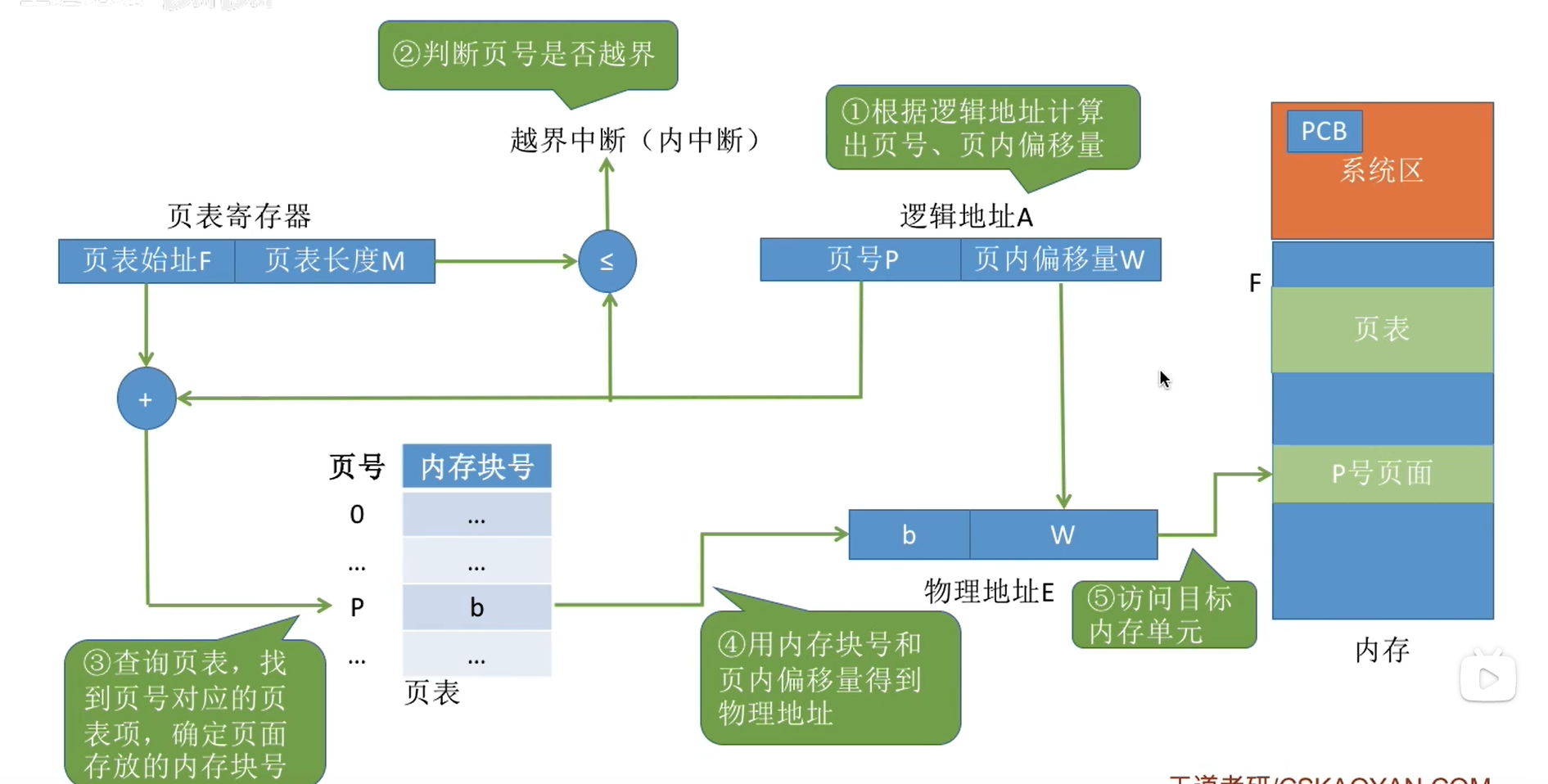
基本地址变换结构 每次要访问两次内存。
查页表,知道要访问的数据的位置:一次;
去访问数据:二次。
具有快表的地址变换机构
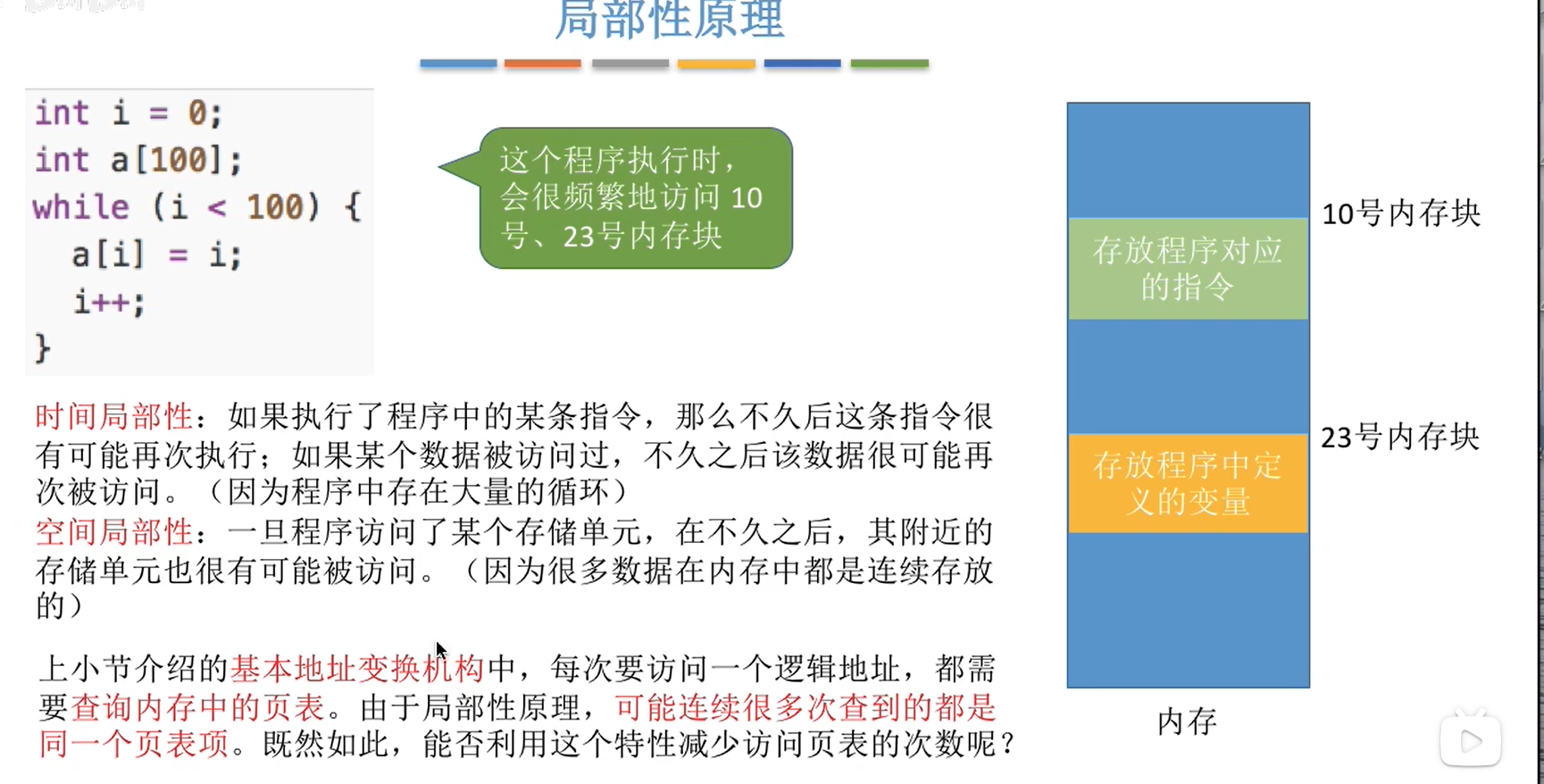
让最近访问过的页表项存到快表中。
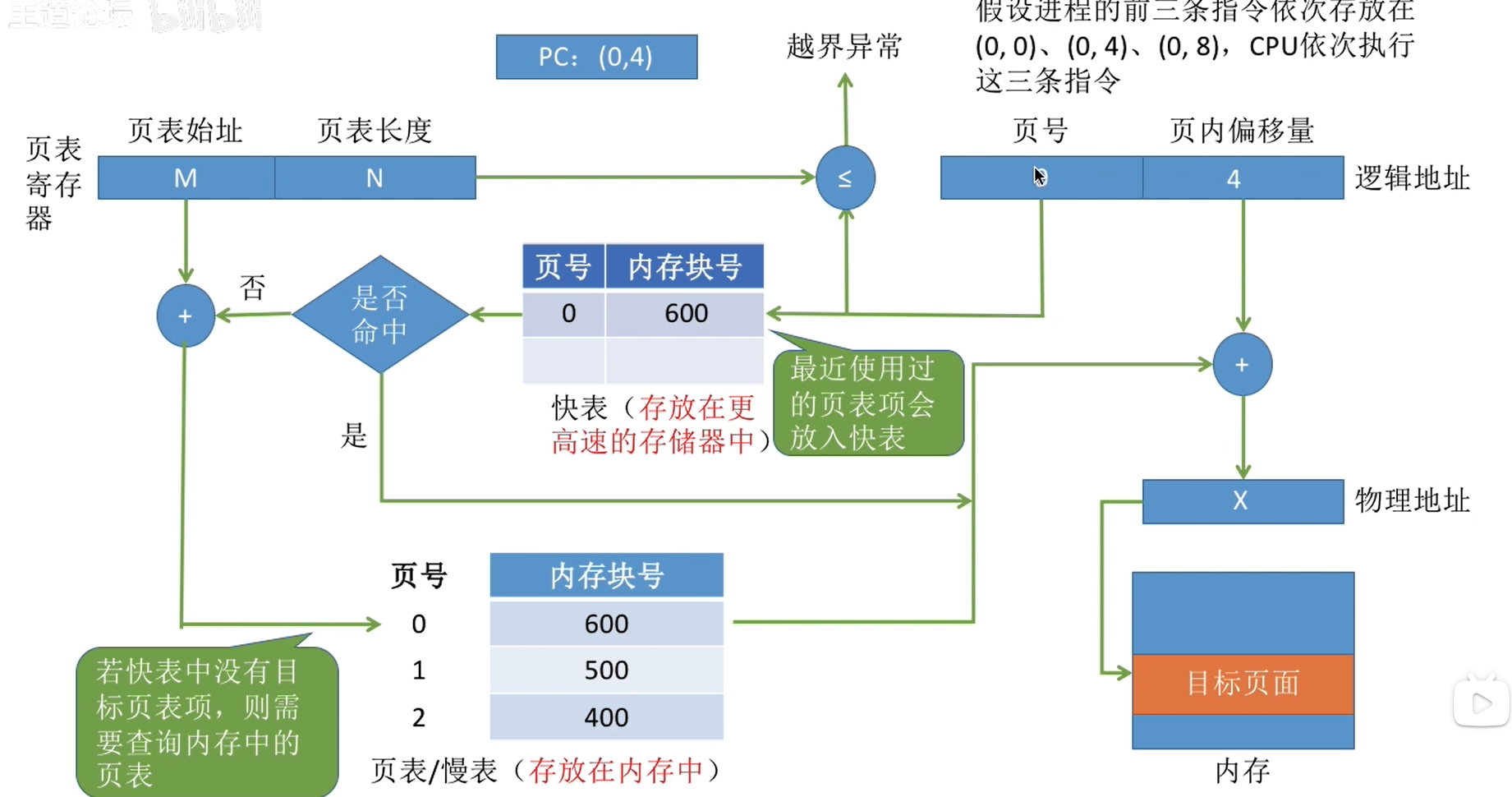
如果快表中有该页表项,直接取出该项计算出物理地址,就不用到慢表中查表了。
访问快表命中了,就只需要一次访存。

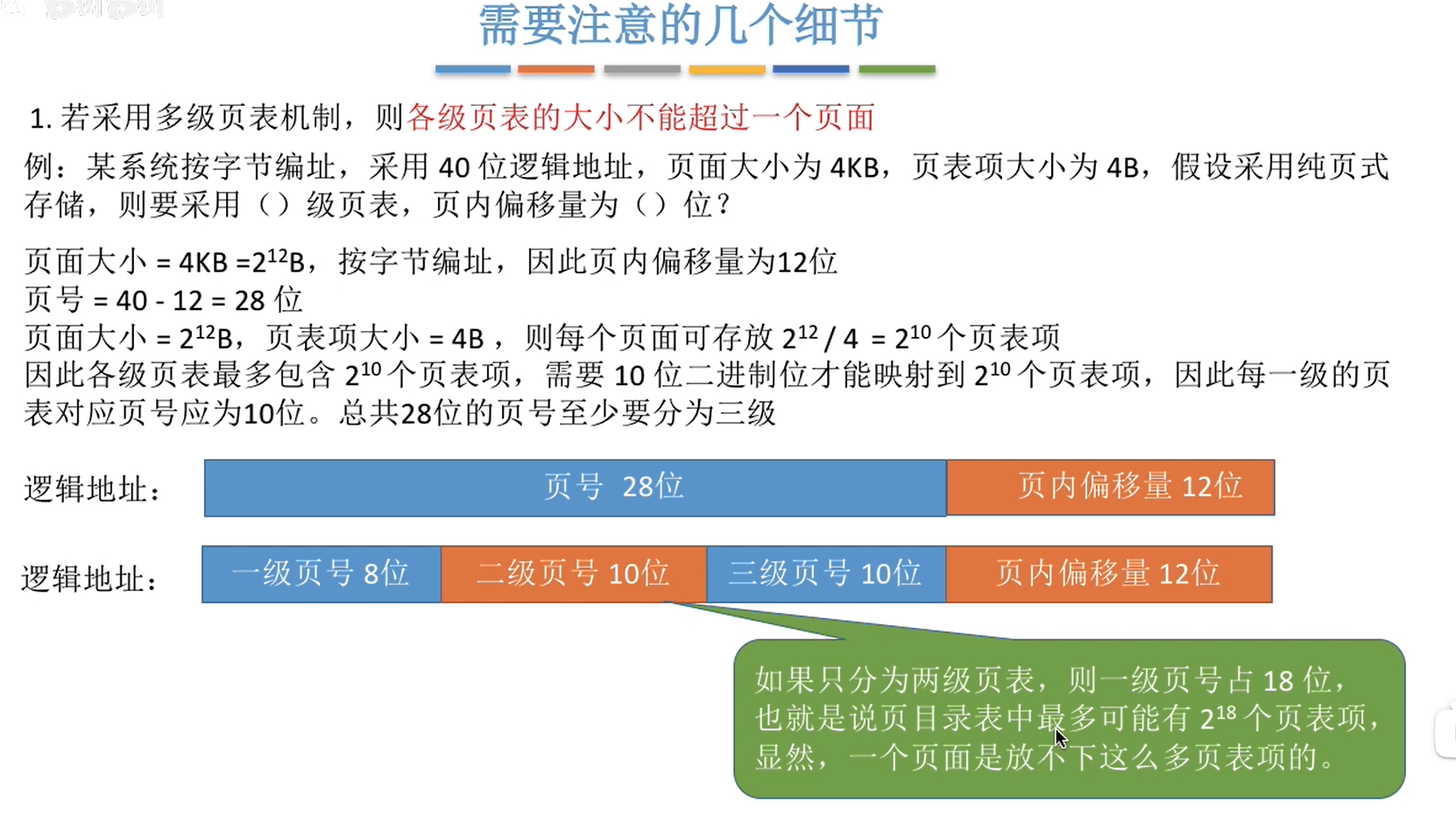
两级页表
- 单极页表必须连续存储;
- 并不是整张页表都会被频繁访问到。
可以把长长的页表再分成离散的几块,即第二级页表。又叫顶级页表。这样就解决了问题1.
然后对于没有进内存的目标页,访问的时候产生缺页中断,然后调入页。
但是没有快表的话,两级页表要访存3次。
基本分段存储管理方式
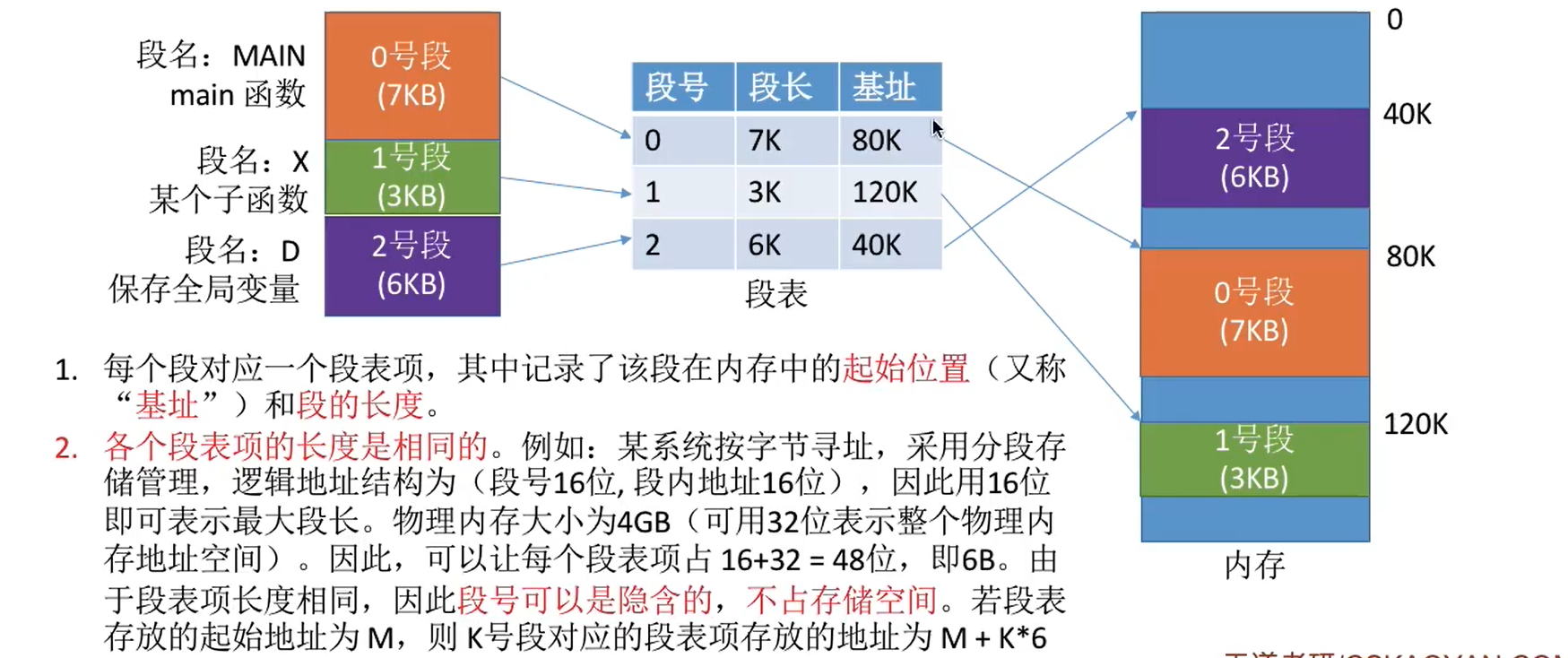
按逻辑把程序分为一个个段(如 主函数,sum 函数……)分段离散的存储到内存中。可读性更高。
段号规定了可以有多少个段,段内地址规定了段的大小。
当然啦,为了查找到哪个段放在哪里,也需要段表。段表每一条包含段号、基址(起始位置)、段长。
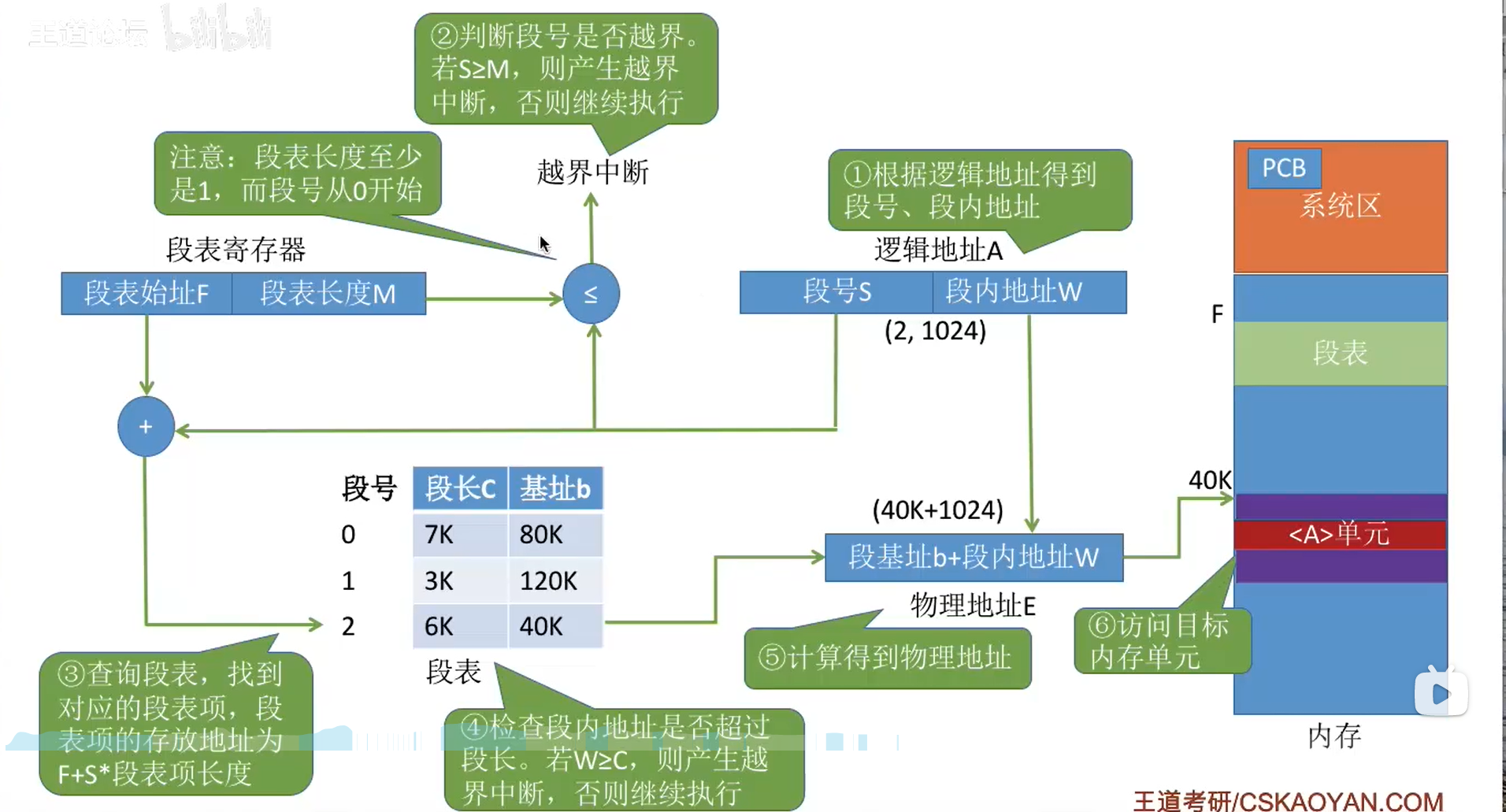
段表寄存器存储在系统区的 PCB 中,即段表的位置。
相比分页,分段是有意义的,是二维的,用户既要给出段名(如 main 函数的段),又要给出地址。
分段也更容易实现信息共享和保护。首先什么代码可以共享?不能修改的代码可以共享,如常量,防止多个进程并发访问会出问题。
然后分段是按逻辑分的。比如每个函数分一个段。分页是按大小直接截断的。所以分段可能提取出可以共享的代码片段,分页会更难一些。
分段也是两次访存,也可以尝试快表。
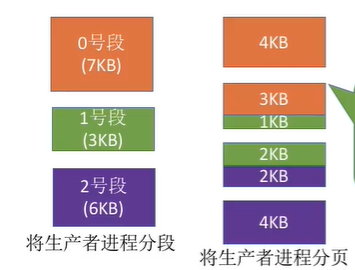
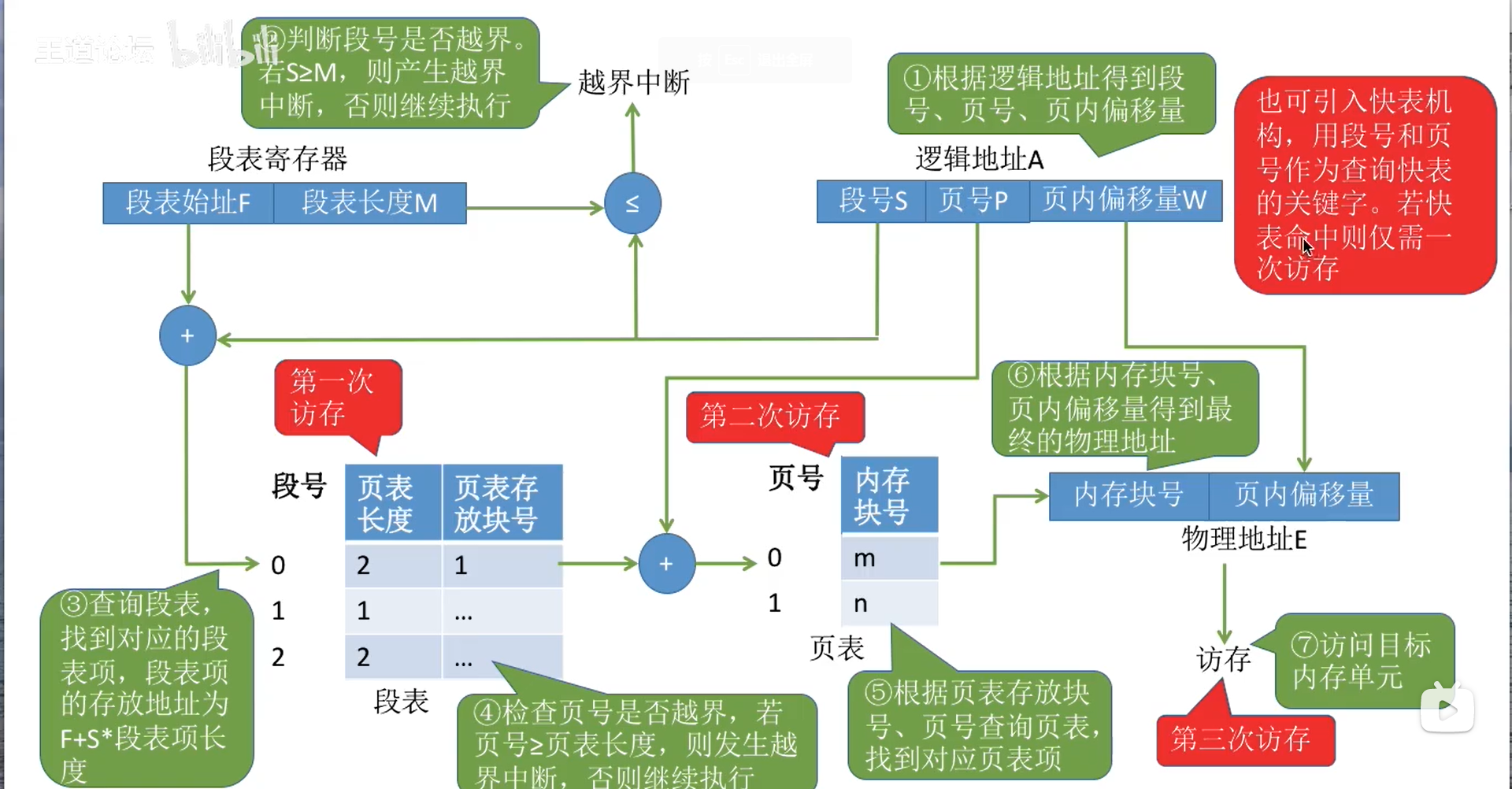
段页式管理方式
分段和分页的缺点是什么?
分页划分固定分区,但不便于信息共享和保护。
分段根据程序分配大小不确定的分区,可能有外部碎片(紧凑还是付出代价很大的)。而且进程太大的话也难以找到一大块连续区域。
那,把大的段分页就好了。
分页的页表包含:页号 页内偏移量信息。分段的段表包含:段号 段长 基址信息(段号可以隐含)。
段页式系统的逻辑地址结构 段包含:段号 页表长 页存放块号(起始地址)。页包含:页号 页面存放的内存块号。
虚拟内存
归根结底,以上的内存分配方法需要把整个程序都装入内存运行。而且由于内存的驻留性,程序运行完之前整个都一直留在内存中。
第一,没必要,程序的某些部分不常使用,不用一直占在内存里,内存利用率低。第二,太大的程序装不进来。第三,很多程序排队时,这样一次只能运行很少的几个,并发性差。
根据之前快存学到的局部性原理,可以把常用的部分留到内存中,不常用的拿出去。要用到的不在内存里,就拿进来;内存太满,就把不常用的再拿出去。
虚拟内存有多次性(分多次装入)、对换性(可以换出来)、虚拟性。
存储方式:采用连续型并不合适,因为要分多次装入。改用请求式管理。
请求分页管理
和基本分页管理的区别在于:1. 要访问的信息可能在内存中,也可能不在。不在的话要调入进来。要存储该页是否在内存中的信息。
- 暂时不用的可以换出去。如果在内存中做过修改,那么不用拿回到外存;如果做过修改了就要了。
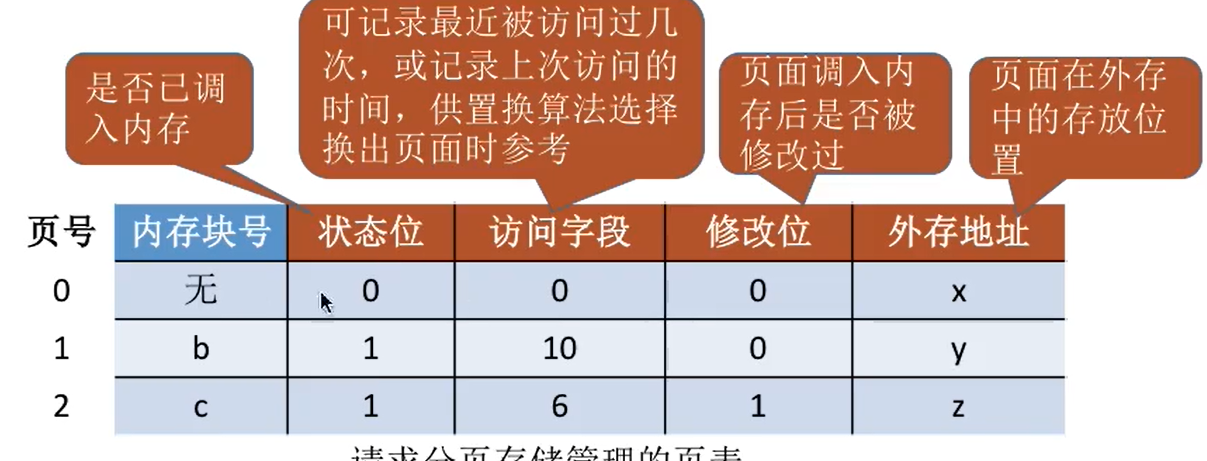
先根据状态位判断要访问的页在不在内存中,不在里面,就先产生缺页中断,调入内存。如果有空闲块就插到空闲块里,没有就根据页面置换算法换出来一个不常用的。调出内存的页面如果发生改变就要写入外存,没有就直接丢掉。最后还要修改请求页表中的状态信息。
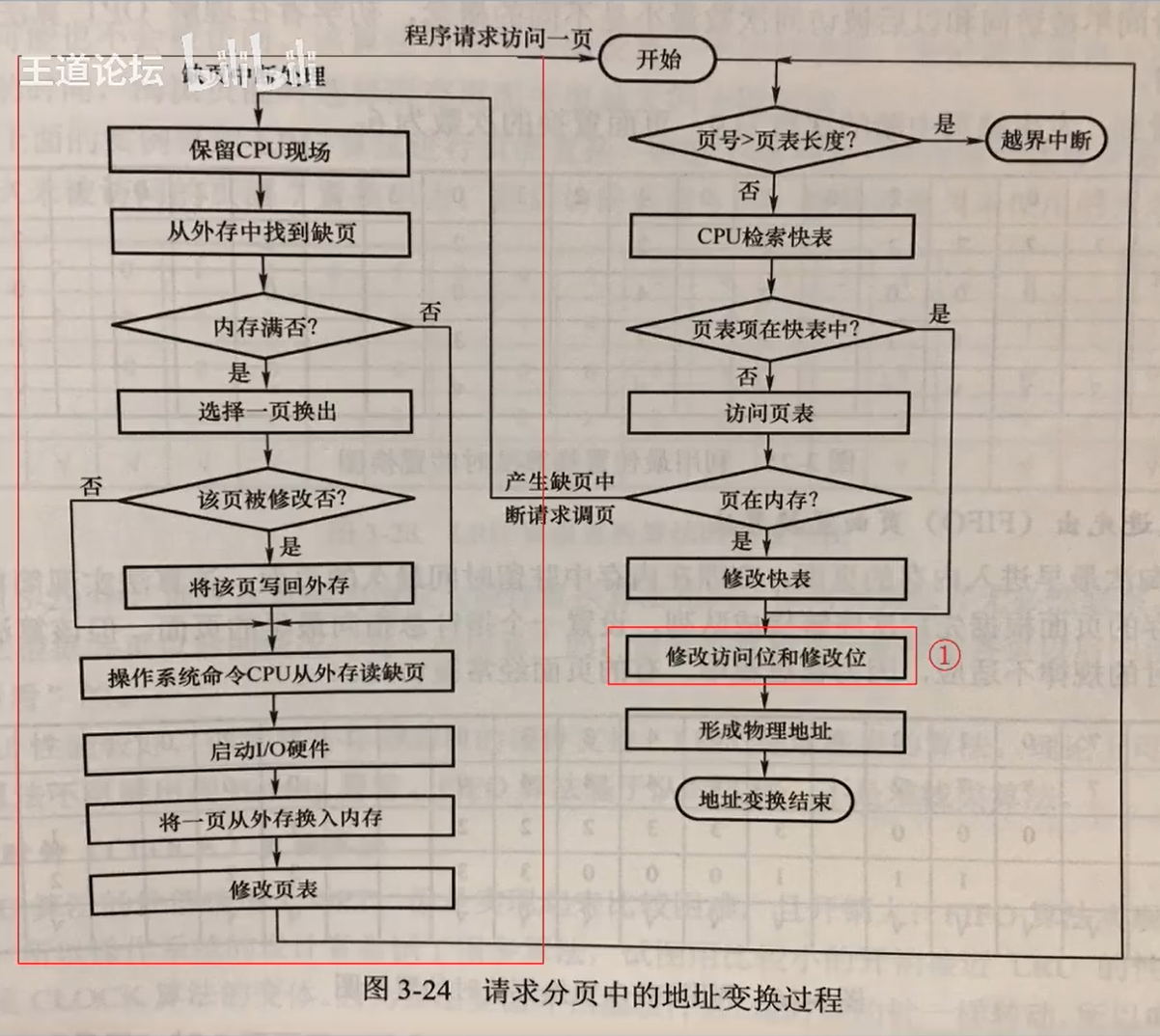
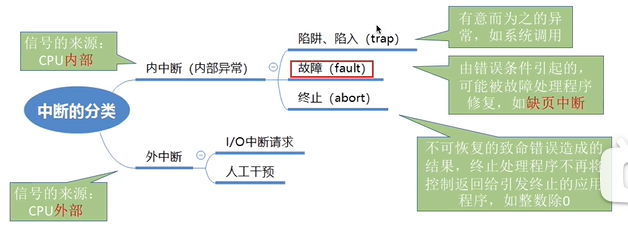
缺页中断是自行产生的内中断。
几个值得注意的点:
- 我们知道,如果内存中的内容被修改(发生了”写“操作),状态位中的修改位变为1,移出内存时要再写入外存。实际上修改位的改变不一定用在内存中修改,可能只修改快表中的修改位即可,这样少访存。
- 换入换出页面太频繁,开销会很大。
- 页面调入内存后,直接就放到快表里,之后访问就访问快表就行。
页面置换算法
追求更小的缺页率,这样换入换出更少。
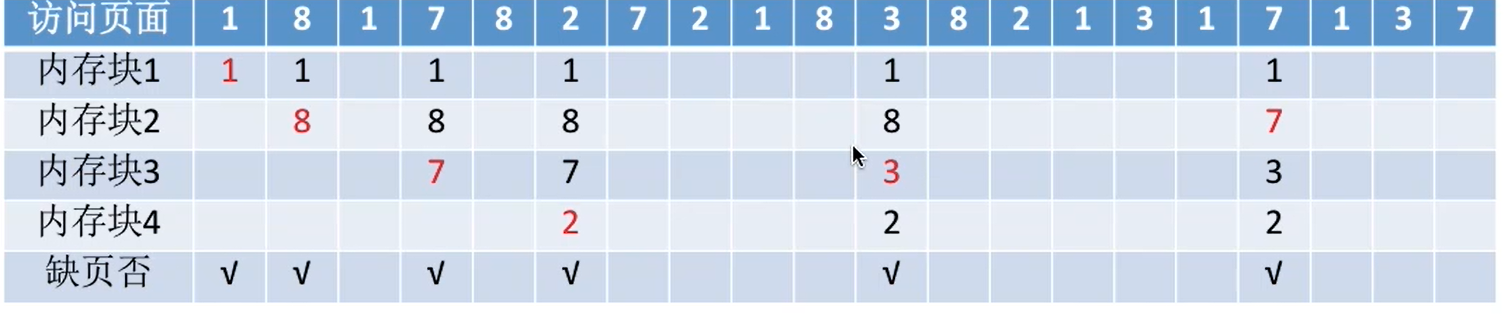
最佳置换算法 OPT:选择不再使用,或者最长时间内不再被访问的页面淘汰。

插入701之后满了,再想插入2就要顶掉一个。看看后面要访问的页面,7是最不着急的,先把7顶掉。后面以此类推。
注意缺页不一定就会发生页面置换。如果还有块空闲就不用。
但最大问题就是操作系统无法提前预判后面的页面访问序列。
先进先出置换算法 FIFO:最早进来的页面最早被淘汰。就是队列的数据结构。
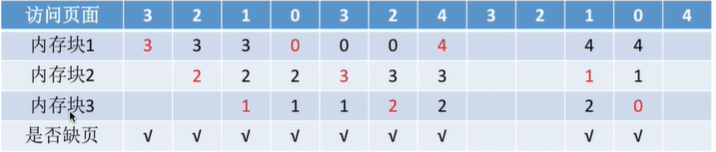
但是这就是再猜啊。怎么能因为用的早就觉得下一秒他不会用了呢?买彩票呢。可能会引发 Belady 异常(为进程分配的物理块变大时,缺页次数反而变多)。
最近最久未使用置换算法 LRU:
哪个最久没用过,就先替换掉哪个。
性能确实好,但是开销大,实现困难。
时钟置换算法 CLOCK:每个页面添加一个访问位,初值都是0,访问过了改为1.每次优先替换掉0的页面。如果全为1,则全置0后再次扫描。
改进的时钟置换算法:同时考虑访问位和修改位。
替换:第一轮扫描找0,0的替换。这种不仅最近没用过,而且不用写入外存。
第二轮找0,1的替换。这种最近没用过,但是之前修改过,要写入外存。
如果这两轮都没找到,说明所有的第一位都是1.全部置0,再进行扫描。
第三轮找0,0,类似第一轮。
第四轮找0,1,类似第二轮。
页面分配策略
驻留集:请求分页存储管理中分给内存的物理块的集合。虚拟存储中,驻留集大小一般小于进程总大小。太小,频繁缺页出入内存效率低;太大,并发性降低。
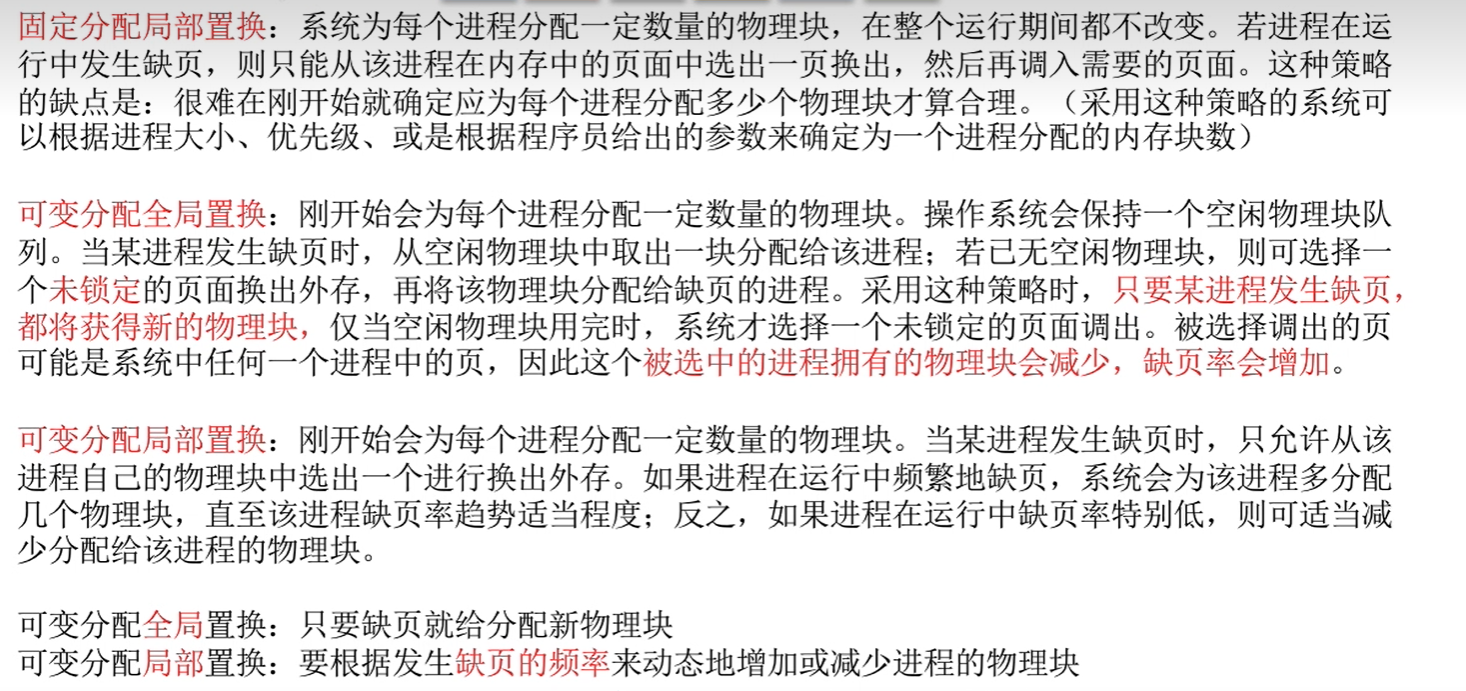
固定分配:一开始给定每个进程固定大小的驻留集。
动态分配:根据运行过程中的情况动态分配大小。
局部置换:缺页时只能当前进程自己的物理块置换需要的页进来。
全局置换:可以用空闲的物理块,或其他进程的物理块置换。全局置换大小肯定不固定,肯定是动态分配。
调入哪些页?
首次调入时,根据局部性原理,某个页相邻的页也会容易用到。因此一调调一小片。
运行中缺页调入时,只调缺少的页。
从何处调入页面?
抖动/颠簸现象:刚换出去的页面又换进来。主要原因是驻留集太少了,少于要频繁使用的块。
工作集:运行时进程实际访问的页面集合。驻留集不应小于工作集。
![[附源码]Python计算机毕业设计房屋租赁系统Django(程序+LW)](https://img-blog.csdnimg.cn/3f551495df91423e919043919d2f7451.png)





![[附源码]Python计算机毕业设计Django基于SpringBt的演唱会购票系统论文2022](https://img-blog.csdnimg.cn/ca065841e7154c4683b166faa9c6e6bd.png)