转自:https://www.cnblogs.com/BlairGrowing/p/15061912.html
刚开始接触深度学习和机器学习,由于是非全日制,也没有方向感,缺乏学习氛围、圈子,全靠自己业余时间瞎琢磨,犹如黑夜中摸索着石头过河。
本文只是顺着原作者的思路捋一下,说一下自己对代码的看法和了解,代码部分纯粹照搬原作者的源码。
希望自己也能在黑夜中,摸着石头,跟着前行者的微弱光芒,在狂风暴雨中,坚定信念和祈祷,努力前行,胜利的趟过人生之大河。
import torch
from IPython import display
from matplotlib import pyplot as plt #matplotlib包可用于作图,用来显示生成的数据的二维图。
import numpy as np
import random
feature_size = 2
example_count = 1000
true_w = [8.88888888, 8.88888888]
true_b = 3.14159265
#生成特征,生成均值为0,方差为1 的特征矩阵
features = torch.tensor(np.random.normal(0, 1, (example_count, feature_size)), dtype=torch.float)
#输出特征矩阵的维度
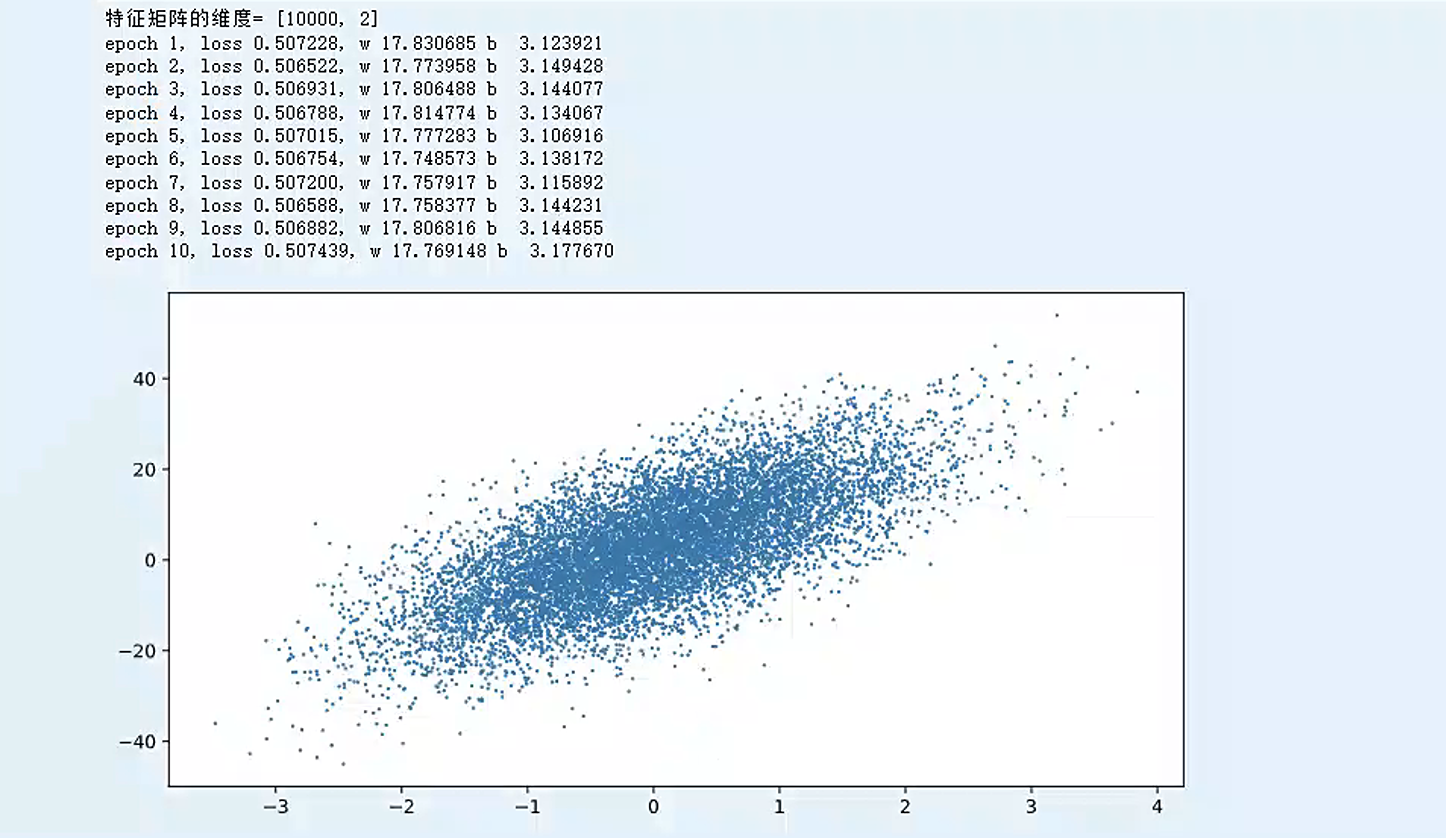
print("特征矩阵的维度=",list(features.shape))
#根据线性方程得出特征对应的labels
labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b
#print(labels)
# 添加随机噪声
labels += torch.tensor(np.random.normal(0, 1, size=labels.size()), dtype=torch.float)
#print(labels)
def use_svg_display():
# 用矢量图显示
display.set_matplotlib_formats('svg')
def set_figsize(figsize=(10, 5)):
use_svg_display()
# 设置图的尺寸
plt.rcParams['figure.figsize'] = figsize
#绘制散点图
set_figsize()
plt.scatter(features[:, 1].numpy(), labels.numpy(), 1);
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
#print(indices)
# 样本的读取顺序是随机的
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
# 最后一次可能不足一个batch
j = torch.LongTensor(indices[i: min(i + batch_size, num_examples)])
yield features.index_select(0, j), labels.index_select(0, j)
batch_sizes = 10
w = torch.tensor(np.random.normal(0, 1, (feature_size, 1)), dtype=torch.float)
b = torch.zeros(1, dtype=torch.float64)
w.requires_grad_(requires_grad=True)
b.requires_grad_(requires_grad=True)
def lineRegression(X, w, b):
return torch.mm(X, w) + b
def squared_loss(y_hat, y):
return (y_hat - y.view(y_hat.size())) ** 2 / 2
def sgd(params, lr, batch_size):
for param in params:
#print(param.grad);
param.data -= lr * param.grad / batch_size # 注意这里更改param时用的param.data
lr = 0.01
num_epochs = 10
net = lineRegression
for epoch in range(num_epochs): # 训练模型一共需要num_epochs个迭代周期
# 在每一个迭代周期中,会使用训练数据集中所有样本一次
for X, y in data_iter(batch_size, features, labels): # x和y分别是小批量样本的特征和标签
l = squared_loss(net(X, w, b), y).sum() # l是有关小批量X和y的损失
l.backward() # 小批量的损失对模型参数求梯度
sgd([w, b], lr, batch_size) # 使用小批量随机梯度下降迭代模型参数
w.grad.data.zero_() # 梯度清零
b.grad.data.zero_()
train_l = squared_loss(net(features, w, b), labels)
print('epoch %d, loss %f, w %f b % f' % (epoch + 1, train_l.mean().item(), w.sum().mean(),b.sum().mean()))
运行结果如下:
注意:
- backward函数会计算,参与本参数运算的(包括本参数在内)其他参数的梯度。
- 最小二乘法squared_loss函数,这里必须要着重阐述一下自己的理解,这部分是整个回归算法的核心,明白了此处,才能真正理解回归算法的本质。该函数一方面用来计算损失,但是它的本质作用,是因为它的最小值就是梯度优化的目标位置,反向求导数,利用梯度下降算法逐步逼近该位置,就可以完成对参数w和b的拟合,最后,它还是损失的图像化表示,通过该函数,最终实现了回归算法理论的闭环。
- 从结果可以看到,最后拟合出来的w(17.769148)和b(3.177670)跟labels中实际值w1(8.88888888) + w2 (8.88888888) = 17.77777776和3.14159265两个数字的值非常接近了,这也显示了机器学习能力的强大和魅力。而且,这还是在29行添加了误差的情况下。若是删除第29行人为添加的正态分布误差,真实数据的拟合结果如下图,误差在万分之一量级。

- np.random.normal函数当均值和方差不是0和1时,容易发生nan错误。原因未知。搞不懂,pytorch这么强大的框架,为何正态分布下,均值和方差到10以上,就会发生溢出错误。
- 另外,在sgd函数中,梯度计算时要除以batch_size。这是为什么呢?百度了一下,发现此文对此做了完美的解释:为什么梯度值要除以batch_size?,另外还可以关注此处的解释说明:https://github.com/ShusenTang/Dive-into-DL-PyTorch/issues/75
- 最后一点,加入example_count改为10000,那么loss就降为0,为何变化速率这么快呢?是正常的学习结果还是有什么问题呢?