SPI协议
SPI(Serial Peripheral Interface)是一种同步串行接口技术,由Motorola公司推出。SPI总线系统是一种同步串行外设接口,允许MCU与各种外围设备以串行方式进行通信和数据交换。外围设备包括FLASHRAM、A/D转换器、网络控制器、MCU等。SPI是一种高速的、全双工、同步的通信总线。SPI没有定义速度限制,通常能达到甚至超过10M/bps。
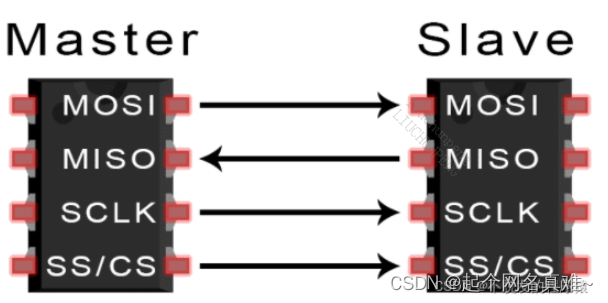
SPI通信原理很简单,需要至少4根线,单向传输时3根线,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)和CS/SS(片选):
MISO( Master Input Slave Output):主设备数据输入,从设备数据输出;
MOSI(Master Output Slave Input):主设备数据输出,从设备数据输入;
SCLK(Serial Clock):时钟信号,由主设备产生;
CS/SS(Chip Select/Slave Select):从设备使能信号,由主设备控制。
下面是一对一
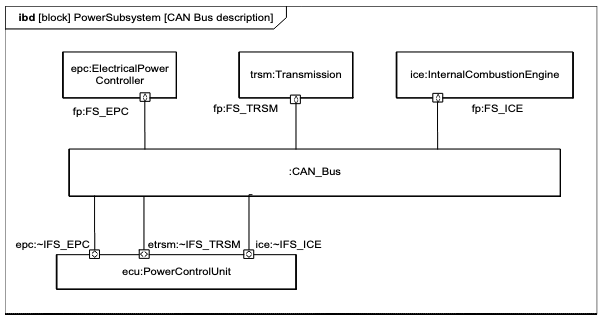
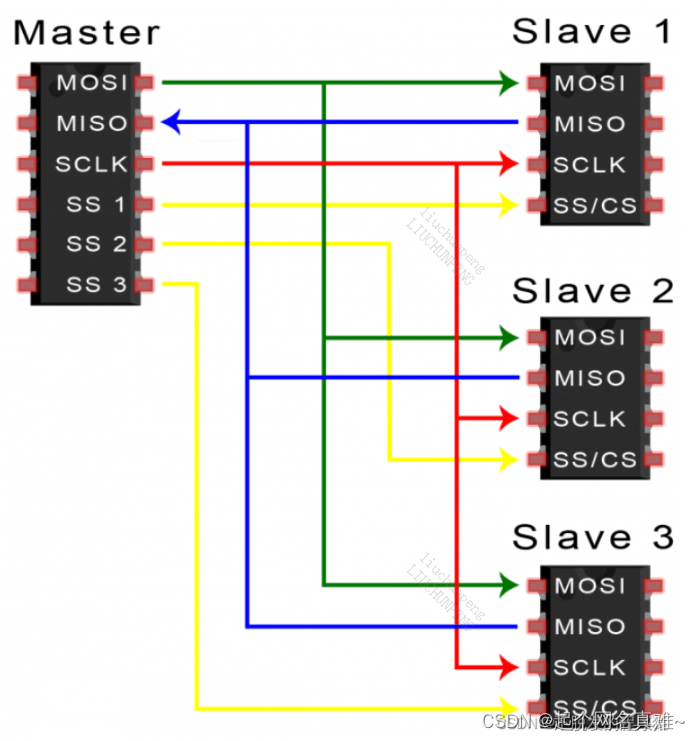
多对多
SPI数据通信的流程可以分为以下几步:
1.主设备将片选信号拉低,选定哪一个芯片,将CS/SS设置为低电平。
2.主设备通过发送时钟信号,来告诉从设备进行写数据或者读数据操作,它将立即读取数据线上的信号,这样就得到了一位数据。
3.主机(Master)将要发送的数据写到发送数据缓存区中,缓存区经过移位寄存器(缓存长度不一定,看芯片的配置),串行移位寄存器通过MOSI信号线将字节一位一位的移出去传送给从机,同时MISO接口接收到的数据经过移位寄存器一位一位的移到接收缓存区。
4、从机(Slave)也将自己的串行移位寄存器(缓存长度不一定,看主机配置)中的内容通过MISO信号线返回给主机。同时通过MOSI信号线接收主机发送的数据,这样两个移位寄存器中的内容就被交换。
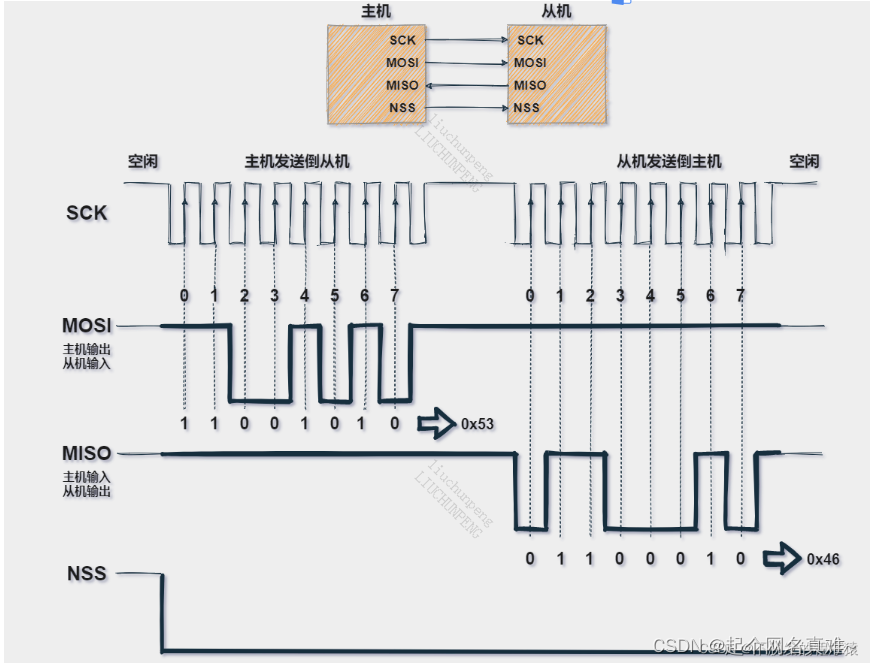
下图示例中简单模拟SPI通信流程,主机拉低NSS片选信号,启动通信,并且产生时钟信号,上升沿触发边沿信号,主机在MOSI线路一位一位发送数据0X53,在MISO线路一位一位接收数据0X46,如下图所示:(这里的SPI有四种模式,下图中是模式3)
SPI的四种模式
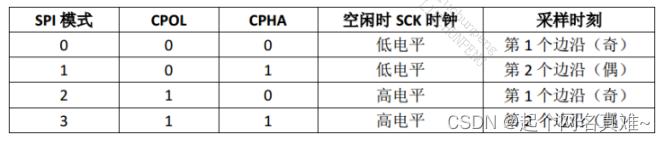
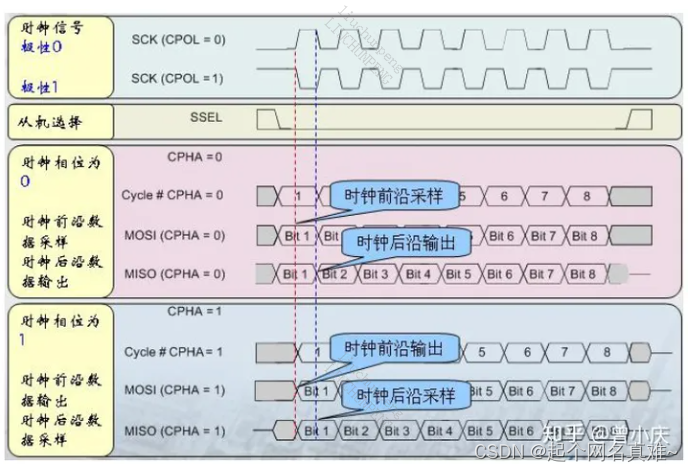
1.时钟极性(CPOL)定义了时钟空闲状态电平:
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时。
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时。
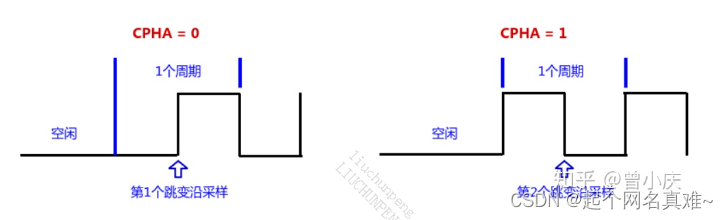
2.时钟相位(CPHA)定义数据的采集时间。
CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿。
CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿。
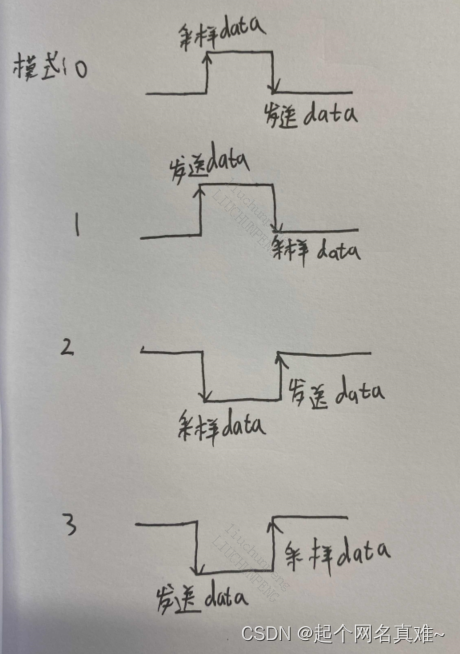
Mode0:CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
Mode1:CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
Mode2:CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
Mode3:CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
实际就是这样
模式的选择就是看什么时候发送数据什么时候接受数据,设置这四个模式是为了兼容更多的器件。
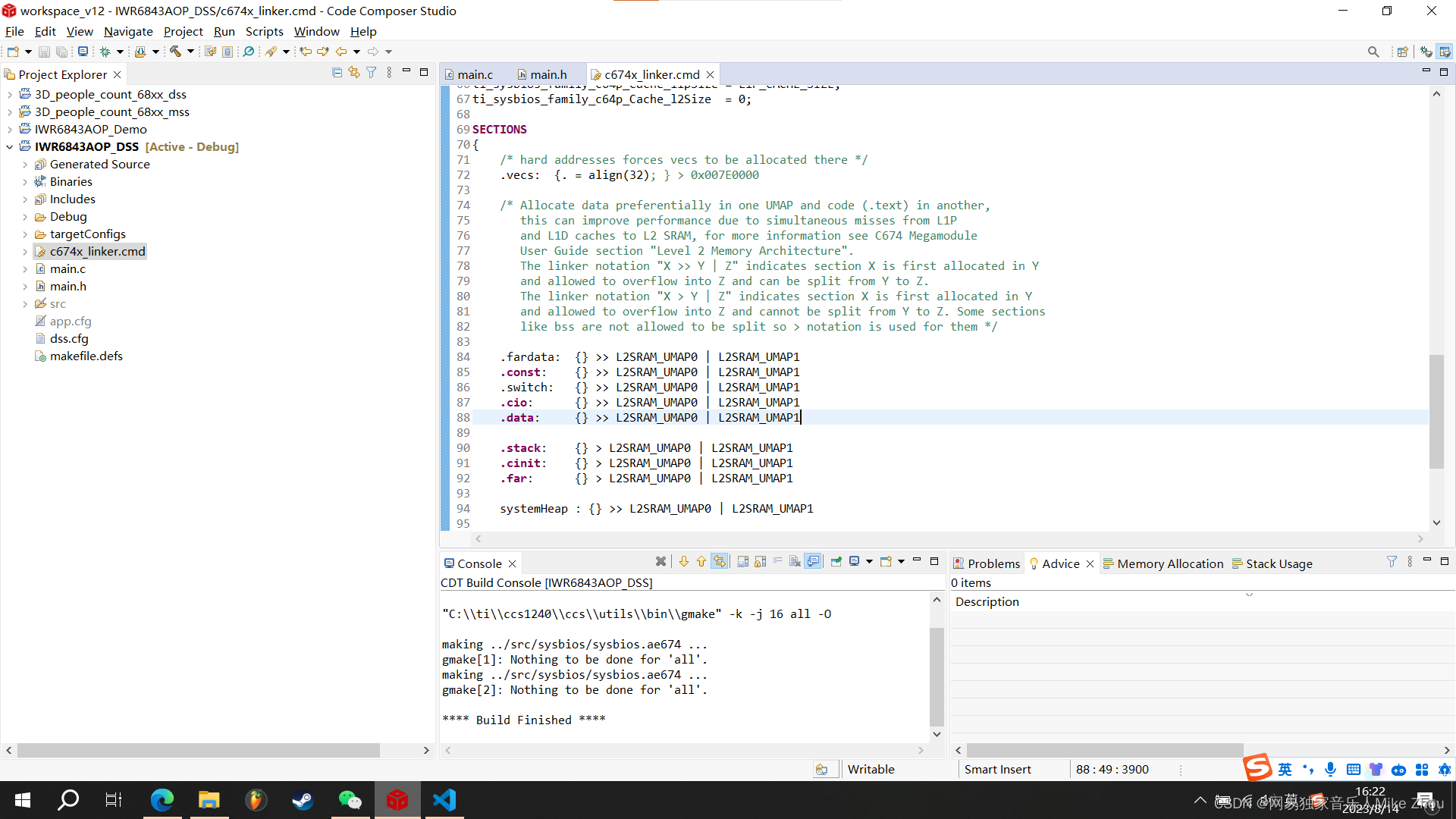
至于怎么变成程序我正在学习