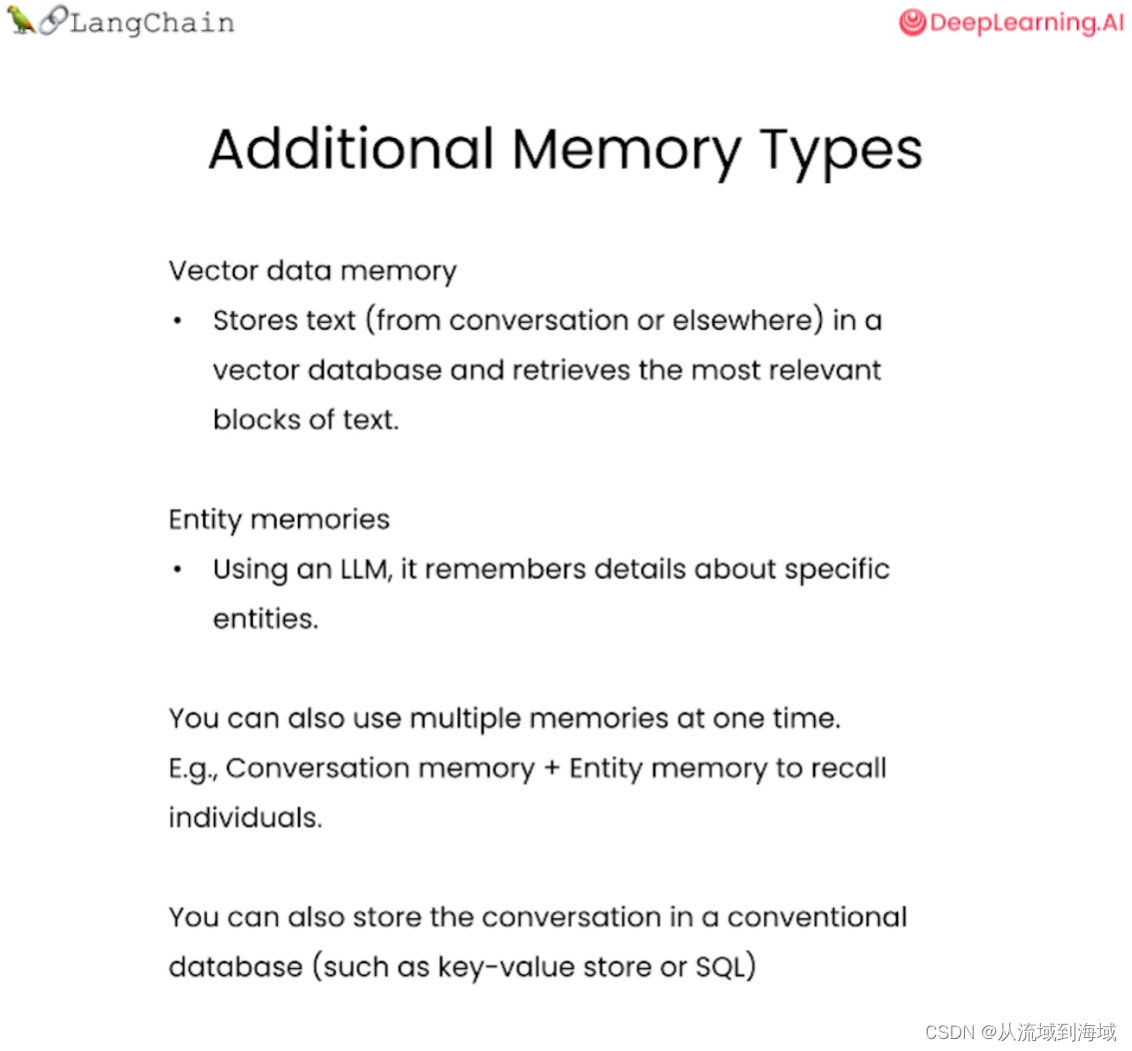
为了提高各种计算机视觉任务的性能,人们研究了各种注意机制。然而,以往的方法忽略了保留通道和空间方面的信息以增强跨维度交互的重要性。因此,我们提出了一种全局调度机制,通过减少信息缩减和放大全局交互表示来提高深度神经网络的性能。我们沿着卷积空间注意子模块引入了用于通道注意的多层感知器3D置换。
GAMAttention注意力机制原理图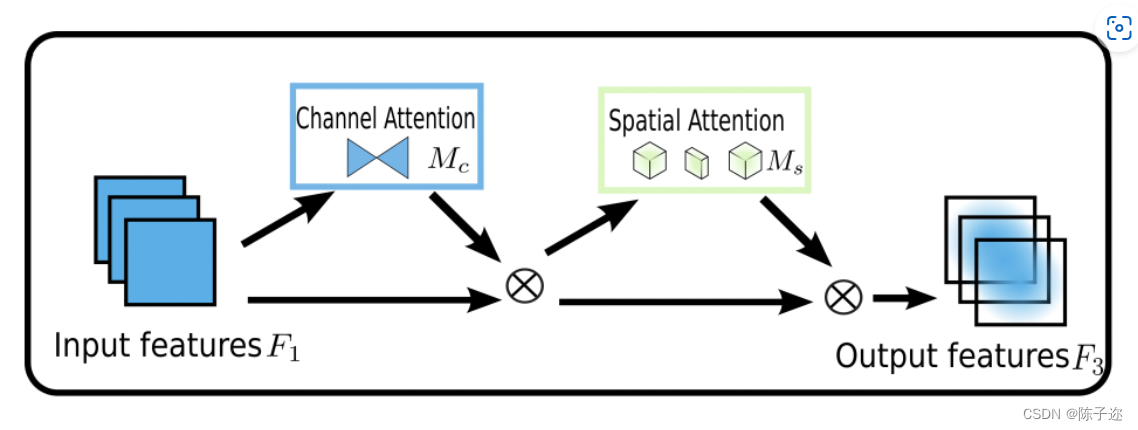
对于ImageNet-1K,我们将图像预处理为224×224(He et al.[2016])。我们包括ResNet18和ResNet50(He et al.[2016]),以验证不同网络深度的方法推广。对于ResNet50,我们将其与群卷积进行了比较,以防止参数显著增加。我们将起始学习率设置为0.1,并每隔30个阶段降低一次。我们总共使用90个训练时段。在空间注意子模块中,我们将第一个块的第一步从1切换到2,以匹配特征的大小。为了进行公平比较,CBAM保留了其他设置,包括在空间注意子模块中使用最大池。3 MobileNet V2是用于图像分类的最高效的轻量级模型之一。我们对MobileNet V2使用相同的ResNet设置,只是使用了0.045的初始学习率和4×10的权重衰减−5.对ImageNet-1K的评估如表所示。它表明GAM可以稳定地提高不同神经架构的性能。尤其是对于ResNet18,GAM以更少的参数和更好的效率优于ABN。
YOLOV5 修改代码
1.1增加以下GAMAttention.yaml文件
# YOLOv5 🚀 by YOLOAir, GPL-3.0 license
# parameters
nc: 10 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
#- [5,6, 7,9, 12,10] # P2/4
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args] # [c=channels,module,kernlsize,strides]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2 [c=3,64*0.5=32,3]
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, GAMAttention, [1024,1024]], #9
[-1, 1, SPPF, [1024,5]], #10
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 14
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 18 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 15], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 21 (P4/16-medium) [256, 256, 1, False]
[-1, 1, Conv, [512, 3, 2]], #[256, 256, 3, 2]
[[-1, 11], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 24 (P5/32-large) [512, 512, 1, False]
[[18, 21, 24], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
1.2common.py配置
import numpy as np
import torch
from torch import nn
from torch.nn import init
class GAMAttention(nn.Module):
#https://paperswithcode.com/paper/global-attention-mechanism-retain-information
def __init__(self, c1, c2, group=True,rate=4):
super(GAMAttention, self).__init__()
self.channel_attention = nn.Sequential(
nn.Linear(c1, int(c1 / rate)),
nn.ReLU(inplace=True),
nn.Linear(int(c1 / rate), c1)
)
self.spatial_attention = nn.Sequential(
nn.Conv2d(c1, c1//rate, kernel_size=7, padding=3,groups=rate)if group else nn.Conv2d(c1, int(c1 / rate), kernel_size=7, padding=3),
nn.BatchNorm2d(int(c1 /rate)),
nn.ReLU(inplace=True),
nn.Conv2d(c1//rate, c2, kernel_size=7, padding=3,groups=rate) if group else nn.Conv2d(int(c1 / rate), c2, kernel_size=7, padding=3),
nn.BatchNorm2d(c2)
)
def forward(self, x):
b, c, h, w = x.shape
x_permute = x.permute(0, 2, 3, 1).view(b, -1, c)
x_att_permute = self.channel_attention(x_permute).view(b, h, w, c)
x_channel_att = x_att_permute.permute(0, 3, 1, 2)
x = x * x_channel_att
x_spatial_att = self.spatial_attention(x).sigmoid()
x_spatial_att=channel_shuffle(x_spatial_att,4) #last shuffle
out = x * x_spatial_att
return out
def channel_shuffle(x, groups=2): ##shuffle channel
#RESHAPE----->transpose------->Flatten
B, C, H, W = x.size()
out = x.view(B, groups, C // groups, H, W).permute(0, 2, 1, 3, 4).contiguous()
out=out.view(B, C, H, W)
return out
1.3yolo.py配置
在 models/yolo.py文件夹下
定位到parse_model函数中
elif m is GAMAttention:
c1, c2 = ch[f], args[0]
if c2 != no:
c2 = make_divisible(c2 * gw, 8)
2.1 YOLOv7 yaml
其他部分同v5
# YOLOv7 🚀, GPL-3.0 license
# parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone by yoloair
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 1, CNeB, [128]],
[-1, 1, Conv, [256, 3, 2]],
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 16-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]],
[-1, 1, MP, []],
[-1, 1, Conv, [512, 1, 1]],
[-3, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, -3], 1, Concat, [1]],
[-1, 1, CNeB, [1024]],
[-1, 1, Conv, [256, 3, 1]],
]
# yolov7 head by yoloair
head:
[[-1, 1, SPPCSPC, [512]],
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[31, 1, Conv, [256, 1, 1]],
[[-1, -2], 1, Concat, [1]],
[-1, 1, C3C2, [128]],
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[18, 1, Conv, [128, 1, 1]],
[[-1, -2], 1, Concat, [1]],
[-1, 1, C3C2, [128]],
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, GAMAttention, [128]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3, 44], 1, Concat, [1]],
[-1, 1, C3C2, [256]],
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3, 39], 1, Concat, [1]],
[-1, 3, C3C2, [512]],
# 检测头 -----------------------------
[49, 1, RepConv, [256, 3, 1]],
[55, 1, RepConv, [512, 3, 1]],
[61, 1, RepConv, [1024, 3, 1]],
[[62,63,64], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]如果没有C3C2模块的可以自己换回原本的
v8和v5是一样的配置方式



![[PaddlePaddle] [学习笔记] [上] 计算机视觉(卷积、卷积核、卷积计算、padding计算、BN、缩放、平移、Dropout)](https://img-blog.csdnimg.cn/4354d070d6434c8eab53dae68509836c.png#pic_center)