资料来源于硬件家园:资料汇总 - FreeRTOS实时操作系统课程(多任务管理)
一、调度锁、中断锁,任务锁概念
1、调度锁
调度锁就是 RTOS 提供的调度器开关函数,如果某个任务调用了调度锁开关函数,处于调度锁开和调度锁关之间的代码在执行期间是不会被高优先级的任务抢占的,即任务调度被禁止。这一点要跟临界段的作用区分开,调度锁只是禁止了任务调度,并没有关闭任何中断,中断还是正常执行的。而临界段进行了开关中断操作。
2、中断锁
中断锁就是 RTOS 提供的开关中断函数,FreeRTOS 没有专门的中断锁函数,使用中断服务程序临界段处理函数就可以实现同样效果。
3、任务锁
为了防止当前任务的执行被其它高优先级的任务打断而提供的锁机制就是任务锁。FreeRTOS 也没有专门的任务锁函数,但是使用 FreeRTOS 现有的功能有两种实现方法:
①利用调度锁关闭任务切换 ② 利用 FreeRTOS 的任务代码临界段处理函数关闭 PendSV 中断和 Systick 中断,进而关闭任务切换。
二、调度锁编程测试
1、调度锁开启函数
调度锁开启函数:void vTaskSuspendAll(void)
使用这个函数要注意以下问题:
①. 调度锁函数只是禁止了任务调度,并没有关闭任何中断。
②. 调度锁开启函数 vTaskSuspendAll 和调度锁关闭函数 xTaskResumeAll 一定要成对使用。
③. 切不可在调度锁开启函数 vTaskSuspendAll 和调度锁关闭函数 xTaskResumeAll 之间调用任何会引起任务切换的 API,比如 vTaskDelayUntil、vTaskDelay、xQueueSend 等。
调度锁关闭函数 BaseType_t vTaskResumeAll(void)
调度锁关闭后,如果需要任务切换,此函数返回 pdTRUE,否则返回 pdFALSE。
使用这个函数要注意以下问题:
①. 调度锁函数只是禁止了任务调度,并没有关闭任何中断。
②. 调度锁开启函数 vTaskSuspendAll 和调度锁关闭函数 xTaskResumeAll 一定要成对使用。
③. 切不可在调度锁开启函数 vTaskSuspendAll 和调度锁关闭函数 xTaskResumeAll 之间调用任何会引起任务切换的 API,比如 vTaskDelayUntil、vTaskDelay、xQueueSend 等。
2、应用方法
void LED0_Task(void const *argument) {
/* USER CODE BEGIN LED0_Task */
/* Infinite loop */
for (;;)
{
HAL_Delay(2000);
//调度器锁
vTaskSuspendAll();
HAL_Delay(5000);
if (xTaskResumeAll() == pdTRUE)
{
taskYIELD(); //立即进行任务切换
}
}
/* USER CODE END LED0_Task */
}三、调度锁编程测试
1、测试方法
创建2个任务,情况如下:
任务1:优先级低,启用调度锁,调度锁开关之间使用HAL_Delay延时5s,退出调度锁后,使用HAL_Delay继续延时2s
任务2:优先级高,指示灯100ms快闪
2、分析
任务2本应该间隔100ms连续快闪,由于低优先级的任务一调用了调度锁开关函数,而且延时了5s,延时期间关闭了任务切换,在此期间,任务2不运行,结果就是任务2的指示灯间隔5s快闪10次。
四、时间管理
1、系统节拍
FreeRTOS实时操作系统需要一个时钟节拍,以供系统处理诸如延时、超时、软件定时器等与时间相关的事件。滴答定时器 Systick:SysTick 定时器位于 NVIC 中,用于产生 SysTick 异常(异常号:15),滴答定时器是一个 24 位的递减计数器,支持中断。使用比较简单,专门用于给操作系统提供时钟节拍。FreeRTOS 的系统时钟节拍可以在配置文件 FreeRTOSConfig.h 里面设置:
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
如上所示的宏定义配置表示系统时钟节拍是 1KHz,即 1ms。
2、延时相关函数
①作用:FreeRTOS 中的时间延迟函数主要有以下两个作用:
为周期性执行的任务提供延迟。
对于抢占式调度器,让高优先级任务可以通过时间延迟函数释放 CPU 使用权,从而让低优先级任务可以得到执行。
②相关函数
vTaskDelay ():( osDelay(200) )用于任务的延迟。 属于相对延时,指每次延时都是从执行函数vTaskDelay()开始,直到延时指定的时间(参数:滴答值)结束。
vTaskDelayUntil ():用于周期性延迟。 属于绝对延时,指间隔指定的时间(参数:滴答值),执行一次调用vTaskDelayUntil()函数的任务。使用此函数需要在 FreeRTOSConfig.h 配置文件中配置如下宏定义为 1
#define INCLUDE_vTaskDelayUntil 1
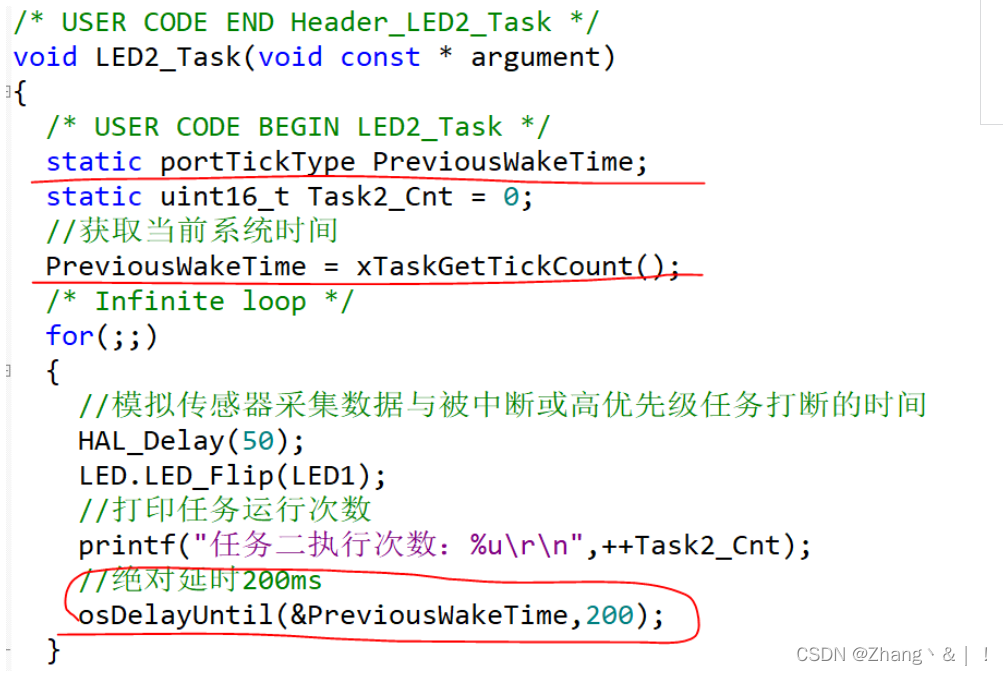
xTaskGetTickCount() :用于获取系统当前运行的时钟节拍数。使用这个函数要注意以下问题:
此函数用于在任务代码里面调用,如果在中断服务程序里面调用的话,需要使用函数xTaskGetTickCountFromISR,这两个函数切不可混用。

xTaskGetTickCountFromISR() :用于获取系统当前运行的时钟节拍数。使用这个函数要注意以下问题:
此函数用于在中断服务程序里面调用,如果在任务里面调用的话,需要使用函数 xTaskGetTickCount,这两个函数切不可混用。

3、相对延时与绝对延时
相对延时:指每次延时都是从执行函数vTaskDelay()开始,直到延时指定的时间(参数:滴答值)结束。
绝对延时:指间隔指定的时间(参数:滴答值),执行一次调用vTaskDelayUntil()函数的任务。





![Vue [Day7]](https://img-blog.csdnimg.cn/2949ac45ab29493dab678e2d2757e89b.png)