【ur3机械臂配置夹爪Robotiq2F-85】
- 1. 前言
- 2. 按照官网要求清点安装设备
- 3. 在示教器上配置夹爪
- 3.1 另一头连接好夹爪和缆线
- 3.2 下载官网驱动
- 5. 总结
1. 前言
- 欢迎大家阅读2345VOR的博客【ur3机械臂配置夹爪Robotiq2F-85】🥳🥳🥳
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
【D435i深度相机YOLO V5结合实现目标检测】
【UR3系统升级到CB3.12附带URcap1.05】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
安装过程如下
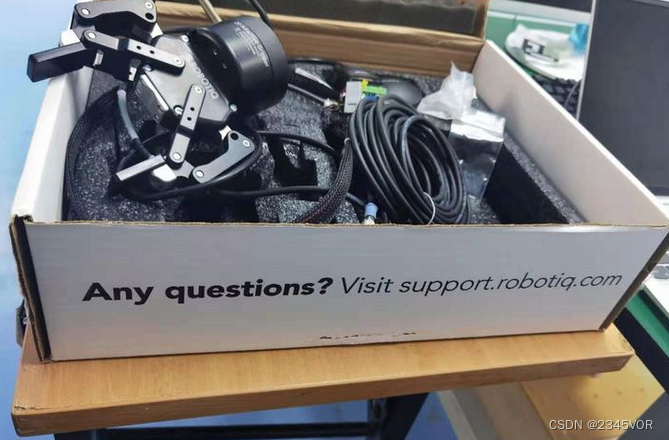
2. 按照官网要求清点安装设备
| 名称 | 功能 |
|---|---|
| 夹爪主体 | 夹具 |
| 夹爪底座 | 连接主体引出数据线 |
| 485模块线缆 | 连接数据线和电源 |

其中1、2部分需要拆开,先安装1到机械臂上固定,然后再安装2。如果有力矩传感器等需要先安装传感器再安装1。

固定好夹爪,可以手动活动夹爪前面

3. 在示教器上配置夹爪
- 将485缆线分别接在24v和0v控制器上。
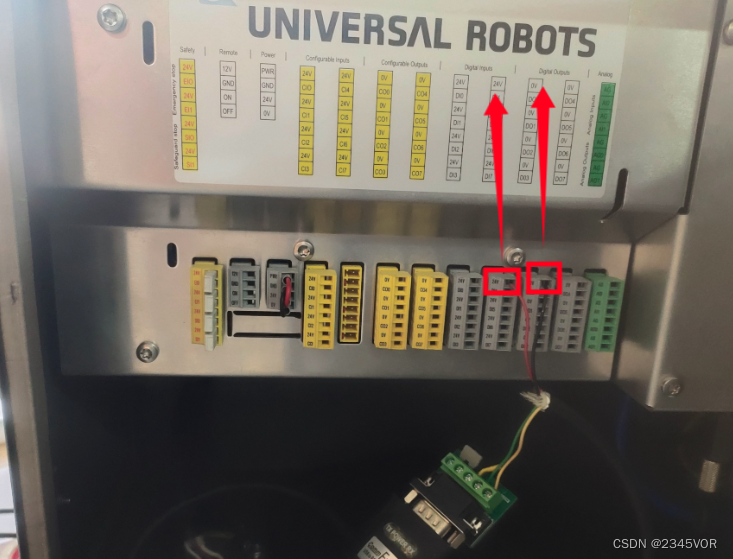
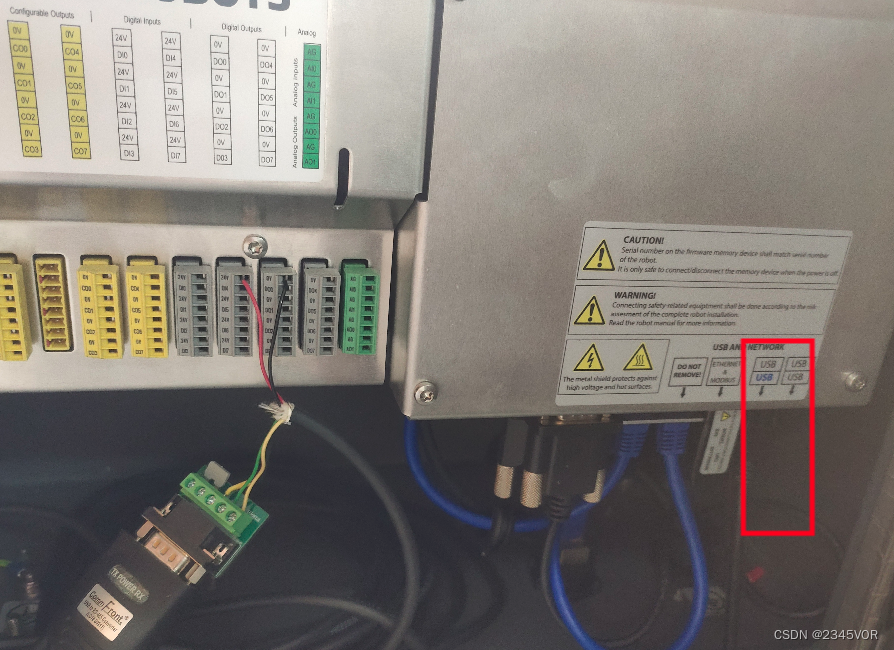
其中485模块线缆输出端接USB插口
 将两个口分别插在红线24v和黑线0v上然后拧紧。之前的线24v–power,0v–地线不要动。
将两个口分别插在红线24v和黑线0v上然后拧紧。之前的线24v–power,0v–地线不要动。
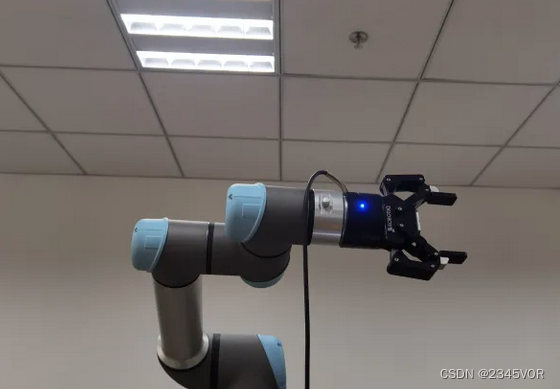
3.1 另一头连接好夹爪和缆线

此时上电

3.2 下载官网驱动
Universal Robots - Robotiq
robotiq.com/cobot-brands/universal-robots
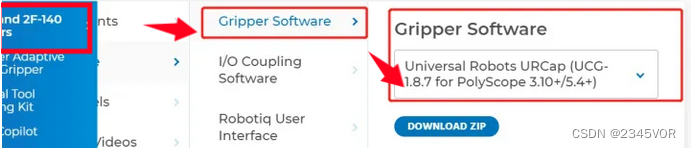
下载后放在U盘中,并插在示教器上。并在右上角设置中导入该文件,并进行重启。
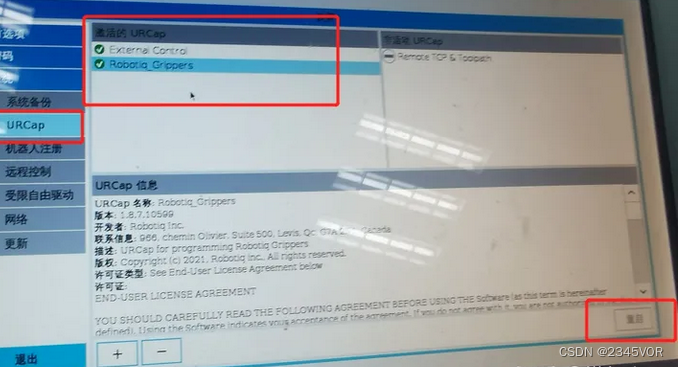
首次激活,需要按下图进行操作
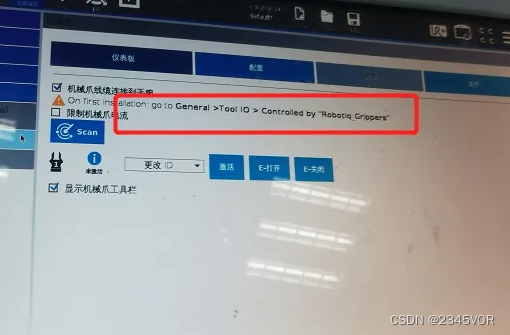
完成后激活即可,这样可以控制夹爪的张开大小以及压力大小
5. 总结
我们学习了【ur3机械臂配置夹爪Robotiq2F-85】插件安装,这样可以在面板和python上控制夹爪一步步更新到3.12,非常感谢你的阅读,如果有任何问题请在下面留言!!!
本文学习了【ur3机械臂配置夹爪Robotiq2F-85】,我会作UR3的抓取实验,后期会分享更多有趣的操作从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。✨✨✨