轮廓拟合(Contour Fitting)是指在图像处理中,通过一些数学模型或曲线拟合方法来近似描述图像中的轮廓。图像中的轮廓是指物体的边界,轮廓拟合可以用于提取、描述和分析物体的形状。
常用的轮廓拟合方法包括多项式拟合、贝塞尔曲线拟合、B样条曲线拟合等。这些方法可以用来找到一个与实际轮廓相符合的数学模型,从而更好地描述物体的形状。拟合后的曲线可以用于进一步的分析、测量、识别等任务。
轮廓拟合在图像处理的许多应用中都有用武之地,例如:
-
形状分析:通过对轮廓进行拟合,可以提取物体的形状特征,如圆形、椭圆形等。
-
物体检测:通过拟合物体的轮廓,可以检测出物体的存在并确定其位置。
-
目标跟踪:将物体的轮廓拟合到连续的图像帧中,可以实现目标的跟踪。
-
工业检测:在制造业中,通过拟合产品的轮廓来检测产品的形状和尺寸。
-
医学图像分析:在医学领域,可以通过对轮廓的拟合来测量病变的大小和形状。
-
计算机辅助设计:在CAD等领域,可以使用轮廓拟合来生成复杂的曲线和形状。
白话地说,轮廓拟合就是用数学上的曲线或者线条,来近似地描绘出一张图片里物体的边缘。就好像你在画画时,用一条线把物体的外形勾勒出来一样。通过这个近似的线条,我们可以更方便地分析物体的形状、大小,或者在图像中找到特定的物体。再看下面的示例图基本就明白什么是轮廓拟合了
在计算轮廓时,可能并不需要实际的轮廓,而仅需要一个接近于轮廓的近似多边形。
OpenCV 提供了多种计算轮廓近似多边形的方法。
矩形包围框
函数 cv2.boundingRect()能够绘制轮廓的矩形边界。该函数的语法格式为:
retval = cv2.boundingRect( array )
式中:
- 返回值 retval 表示返回的矩形边界的左上角顶点的坐标值及矩形边界的宽度和高度。
- 参数 array 是灰度图像或轮廓。
该函数还可以是具有 4 个返回值的形式:
x,y,w,h = cv2.boundingRect( array )
这里的 4 个返回值分别表示:
- 矩形边界左上角顶点的 x 坐标。
- 矩形边界左上角顶点的 y 坐标。
- 矩形边界的 x 方向的长度。
- 矩形边界的 y 方向的长度。
代码示例:显示函数 cv2.boundingRect()不同形式的返回值。
import cv2
#---------------读取并显示原始图像------------------
o = cv2.imread('cc.bmp')
#---------------提取图像轮廓------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
#找到轮廓,返回的是轮廓的点集,以及它们的层次,contours是点集,hierarchy是层次,这里只有一个轮廓,所以只返回一个,用[0]取出来
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
#---------------返回顶点及边长------------------
x,y,w,h = cv2.boundingRect(contours[0])
print("顶点及长宽的点形式:")
print("x=",x)
print("y=",y)
print("w=",w)
print("h=",h)
#---------------仅有一个返回值的情况------------------
rect = cv2.boundingRect(contours[0])
print("\n 顶点及长宽的元组(tuple)形式:")
print("rect=",rect)
运行上述程序,显示如下结果:
顶点及长宽的点形式:
x= 202
y= 107
w= 157
h= 73
顶点及长宽的元组(tuple)形式:
rect= (202, 107, 157, 73)
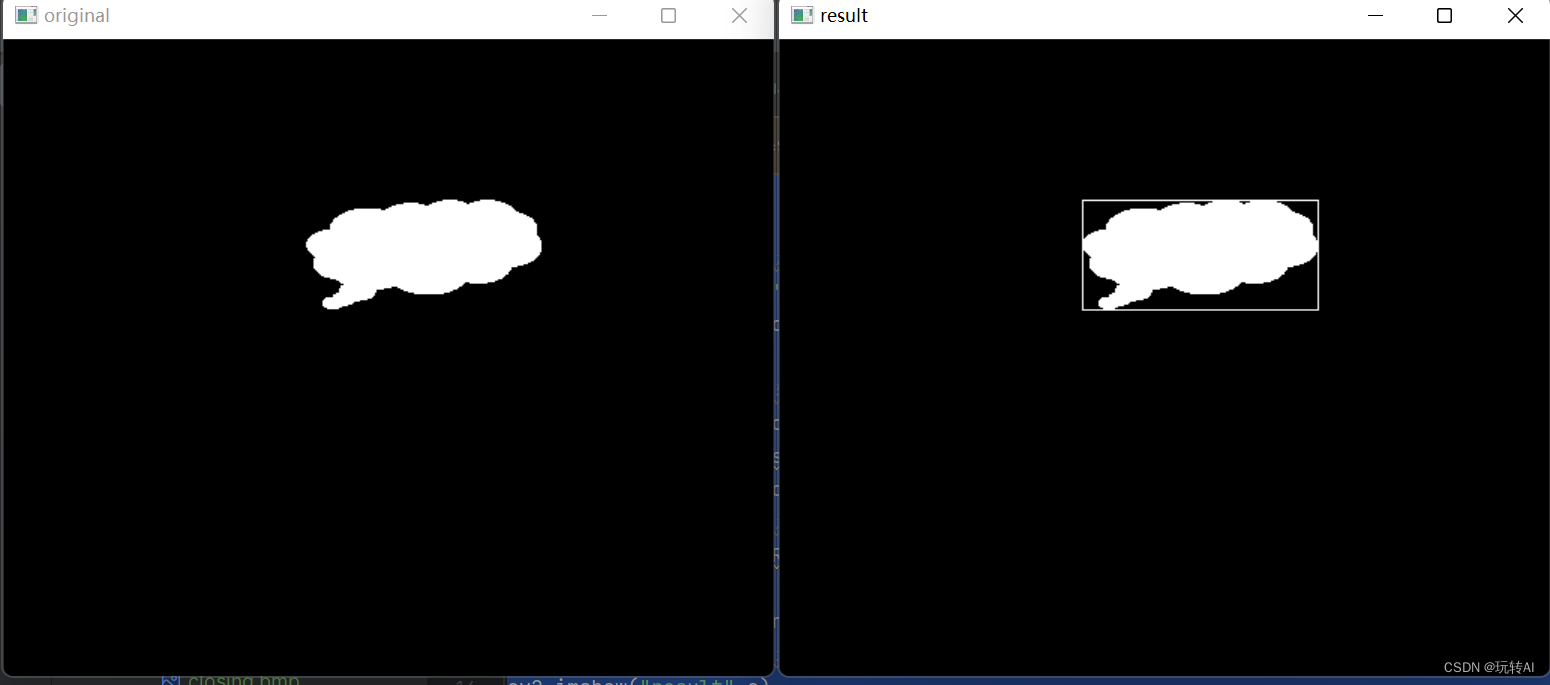
示例2:使用函数 cv2.drawContours()绘制矩形包围框。
代码如下:
import cv2
import numpy as np
#---------------读取并显示原始图像------------------
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
#---------------提取图像轮廓------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
#---------------构造矩形边界------------------
x,y,w,h = cv2.boundingRect(contours[0])
brcnt = np.array([[[x, y]], [[x+w, y]], [[x+w, y+h]], [[x, y+h]]])
cv2.drawContours(o, [brcnt], -1, (255, 255,255), 1)
#---------------显示矩形边界------------------
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
示例2另外一个函数的实现
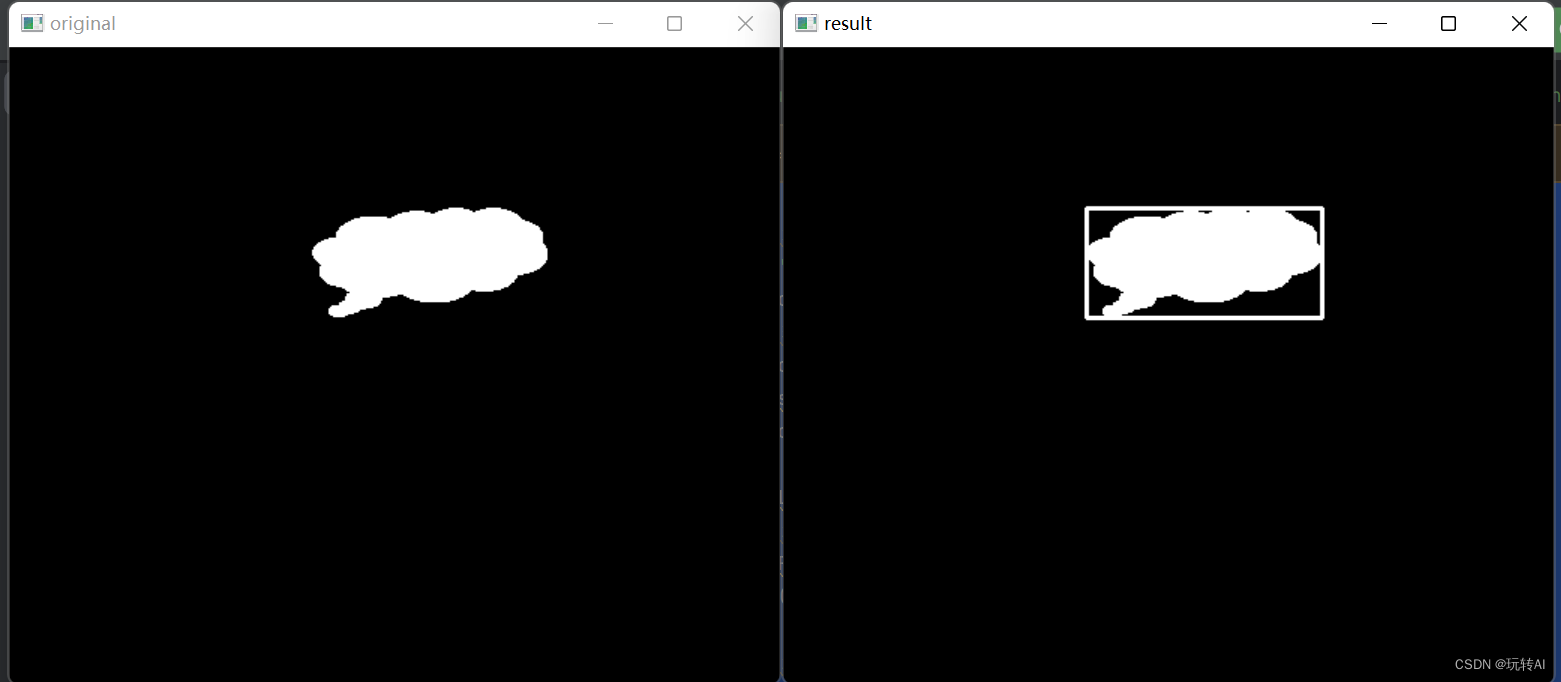
示例3:使用函数 cv2.boundingRect()及 cv2.rectangle()绘制矩形包围框。
import cv2
#---------------读取并显示原始图像------------------
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
#---------------提取图像轮廓------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#---------------构造矩形边界------------------
x,y,w,h = cv2.boundingRect(contours[0])
cv2.rectangle(o,(x,y),(x+w,y+h),(255,255,255),2)
#---------------显示矩形边界------------------
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
最小包围矩形框
函数 cv2.minAreaRect()能够绘制轮廓的最小包围矩形框,其语法格式为:
retval =cv2.minAreaRect( points )
式中:
- 返回值 retval 表示返回的矩形特征信息。
该值的结构是(最小外接矩形的中心(x,y),(宽度,高度),旋转角度)。 - 参数 points 是轮廓。
需要注意,返回值 retval 的结构不符合函数 cv2.drawContours()的参数结构要求。因此,必须将其转换为符合要求的结构,才能使用。函数 cv2.boxPoints()能够将上述返回值 retval 转换为符合要求的结构。函数 cv2.boxPoints()的语法格式是:
points = cv2.boxPoints( box )
式中:
- 返回值 points,是能够用于函数 cv2.drawContours()参数的轮廓点。
- 参数 box 是函数 cv2.minAreaRect()返回值的类型的值。
示例:使用函数 cv2.minAreaRect()计算图像的最小包围矩形框。
import cv2
import numpy as np
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
rect = cv2.minAreaRect(contours[0])
print("返回值 rect:\n",rect)
points = cv2.boxPoints(rect)
print("\n 转换后的 points:\n",points)
points = np.int0(points) #取整
image=cv2.drawContours(o,[points],0,(255,255,255),1)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
返回值 rect:
((280.3700256347656, 138.58999633789062), (63.781028747558594, 154.99778747558594), 81.8698959350586)
转换后的 points:
[[199.14005 117.98 ]
[352.58002 96.06 ]
[361.6 159.19998]
[208.16003 181.12 ]]
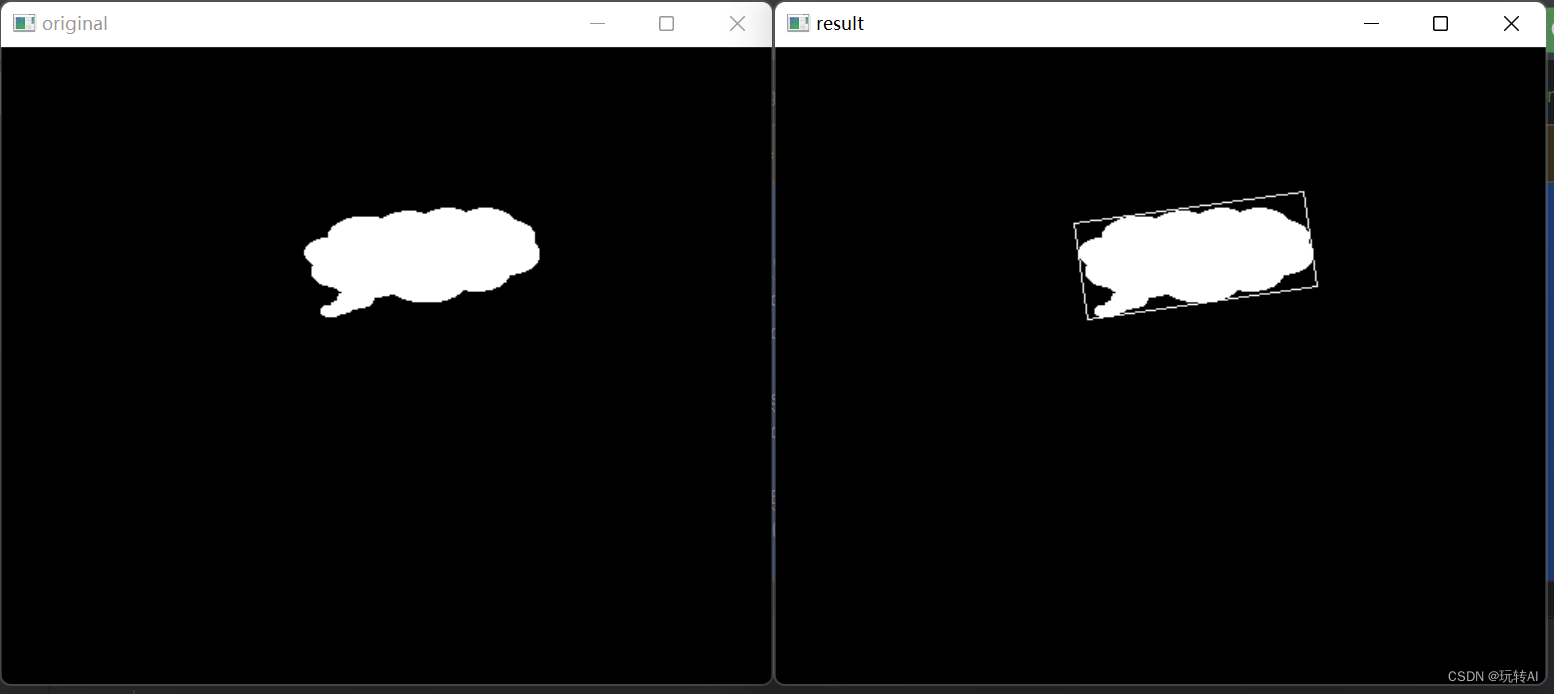
从输出结果可以看出:
- 返回值 rect 表示返回的矩形特征信息。
该值的结构是(最小外接矩形的中心(x,y),(宽度,高度),旋转角度) - 转换后的 points 是一些点,是能够用作函数 cv2.drawContours()参数的轮廓点。
最小包围圆形
函数 cv2.minEnclosingCircle()通过迭代算法构造一个对象的面积最小包围圆形。该函数的
语法格式为:
center, radius = cv2.minEnclosingCircle( points )
式中:
- 返回值 center 是最小包围圆形的中心。
- 返回值 radius 是最小包围圆形的半径。
- 参数 points 是轮廓。
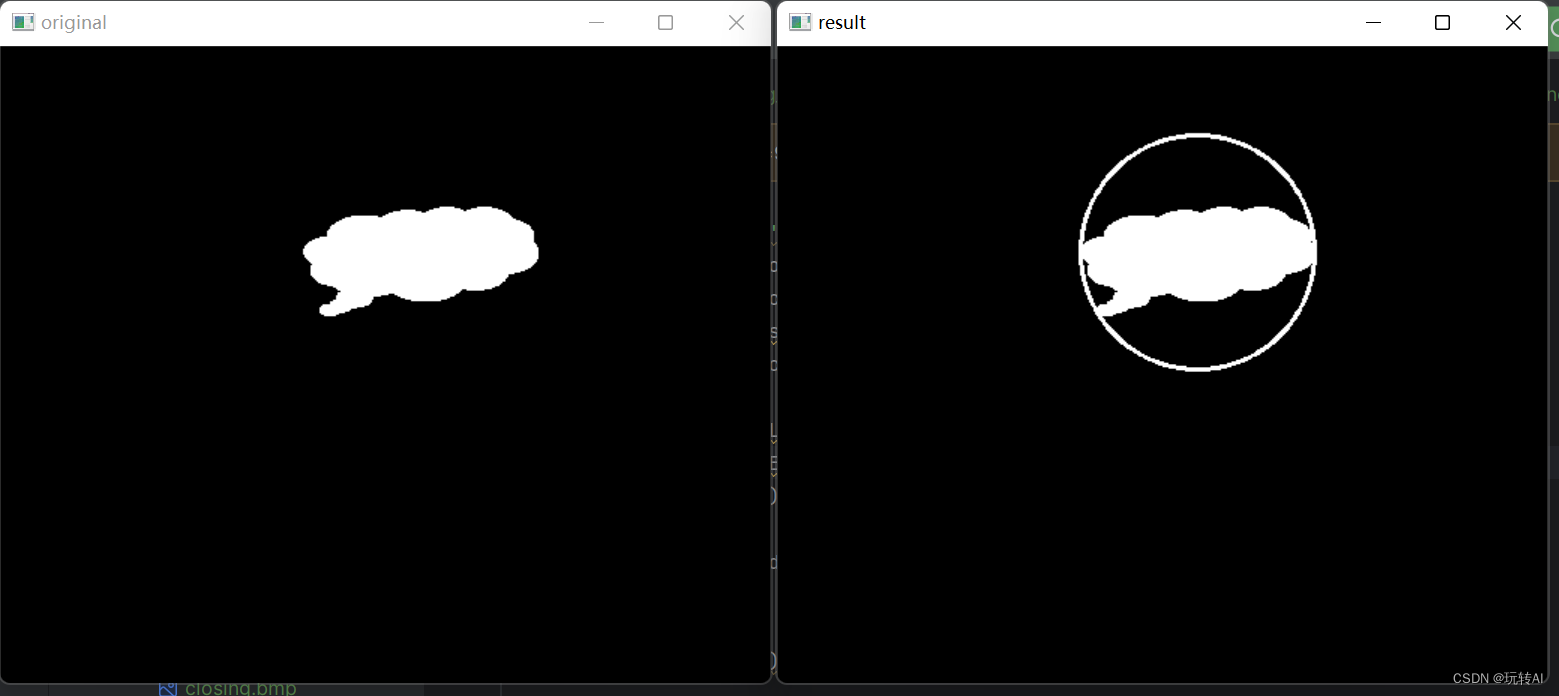
示例:使用函数 cv2.minEnclosingCircle()构造图像的最小包围圆形。
代码如下:
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
(x,y),radius = cv2.minEnclosingCircle(contours[0])
center = (int(x),int(y))
radius = int(radius)
cv2.circle(o,center,radius,(255,255,255),2)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行效果:
最优拟合椭圆
在 OpenCV 中,函数 cv2.fitEllipse()可以用来构造最优拟合椭圆。该函数的语法格式是:
retval = cv2.fitEllipse( points )
式中:
- 返回值 retval 是 RotatedRect 类型的值。这是因为该函数返回的是拟合椭圆的外接矩形,retval 包含外接矩形的质心、宽、高、旋转角度等参数信息,这些信息正好与椭圆的中心点、轴长度、旋转角度等信息吻合。
- 参数 points 是轮廓。
示例:使用函数 cv2.fitEllipse()构造最优拟合椭圆。
代码如下:
import cv2
o = cv2.imread('cc.bmp')
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
cv2.imshow("original",o)
ellipse = cv2.fitEllipse(contours[0])
print("ellipse=",ellipse)
cv2.ellipse(o,ellipse,(0,255,0),3)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
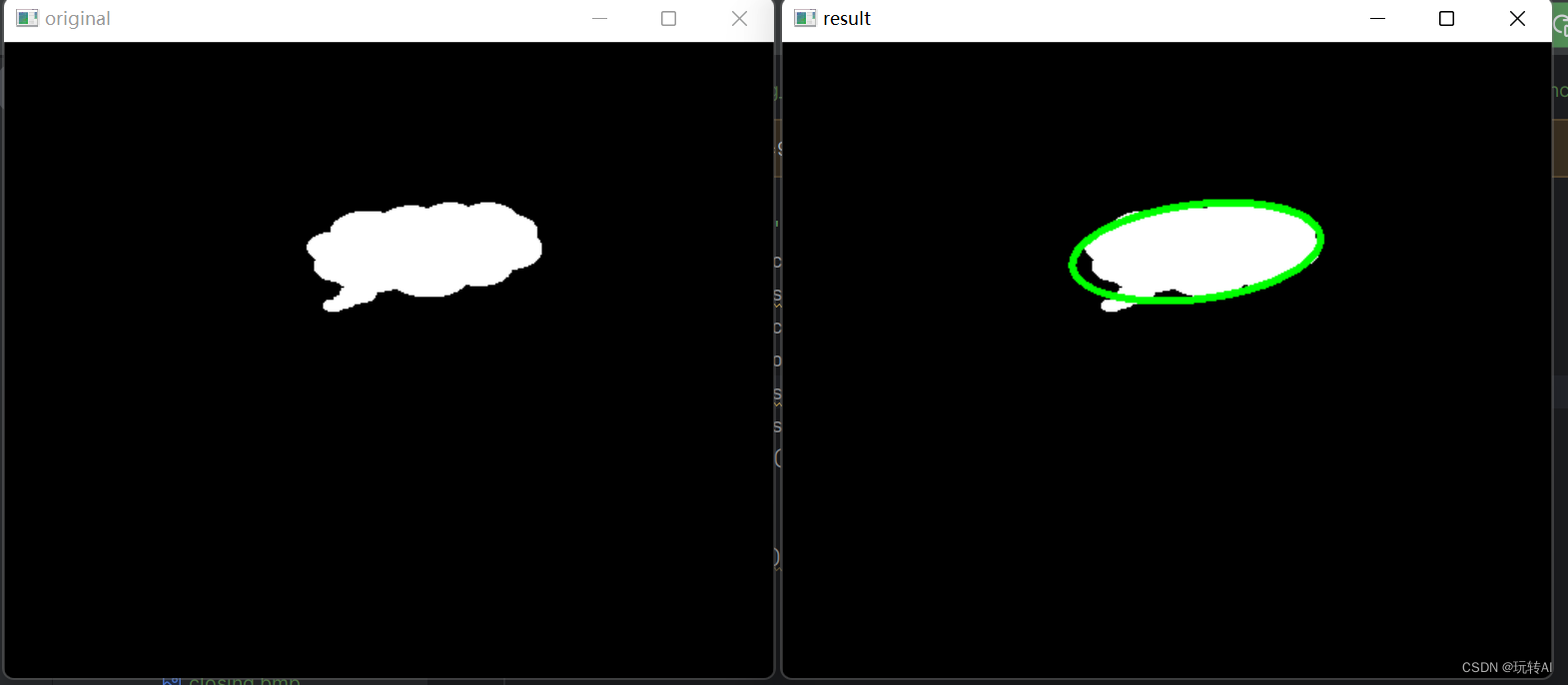
同时,程序还会显示如下的运行结果:
ellipse= ((276.2112731933594, 139.6067352294922), (63.01350021362305,
166.72308349609375), 82.60102844238281)
上述运行结果中:
- (276.2112731933594, 139.6067352294922)是椭圆的中心点。
- (63.01350021362305, 166.72308349609375)是椭圆的轴长度。
- 82.60102844238281 是椭圆的旋转角度。
最优拟合直线
在OpenCV 中,函数 cv2.fitLine()用来构造最优拟合直线,该函数的语法格式为:
line = cv2.fitLine( points, distType, param, reps, aeps )
式中 line 为返回值,是返回的最优拟合直线参数。
式中的参数如下:
- points:轮廓。
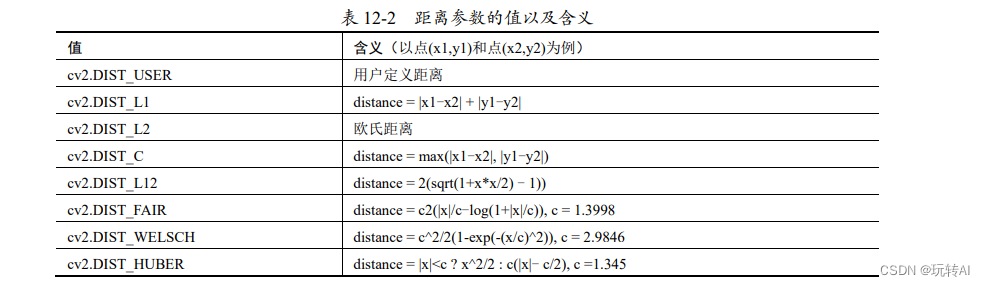
- distType:距离类型。拟合直线时,要使输入点到拟合直线的距离之和最小,其类型如表 12- 2 所示。
- param:距离参数,与所选的距离类型有关。当此参数被设置为 0 时,该函数会自动选择最优值。
- reps:用于表示拟合直线所需要的径向精度,通常该值被设定为 0.01。
- aeps:用于表示拟合直线所需要的角度精度,通常该值被设定为 0.01。
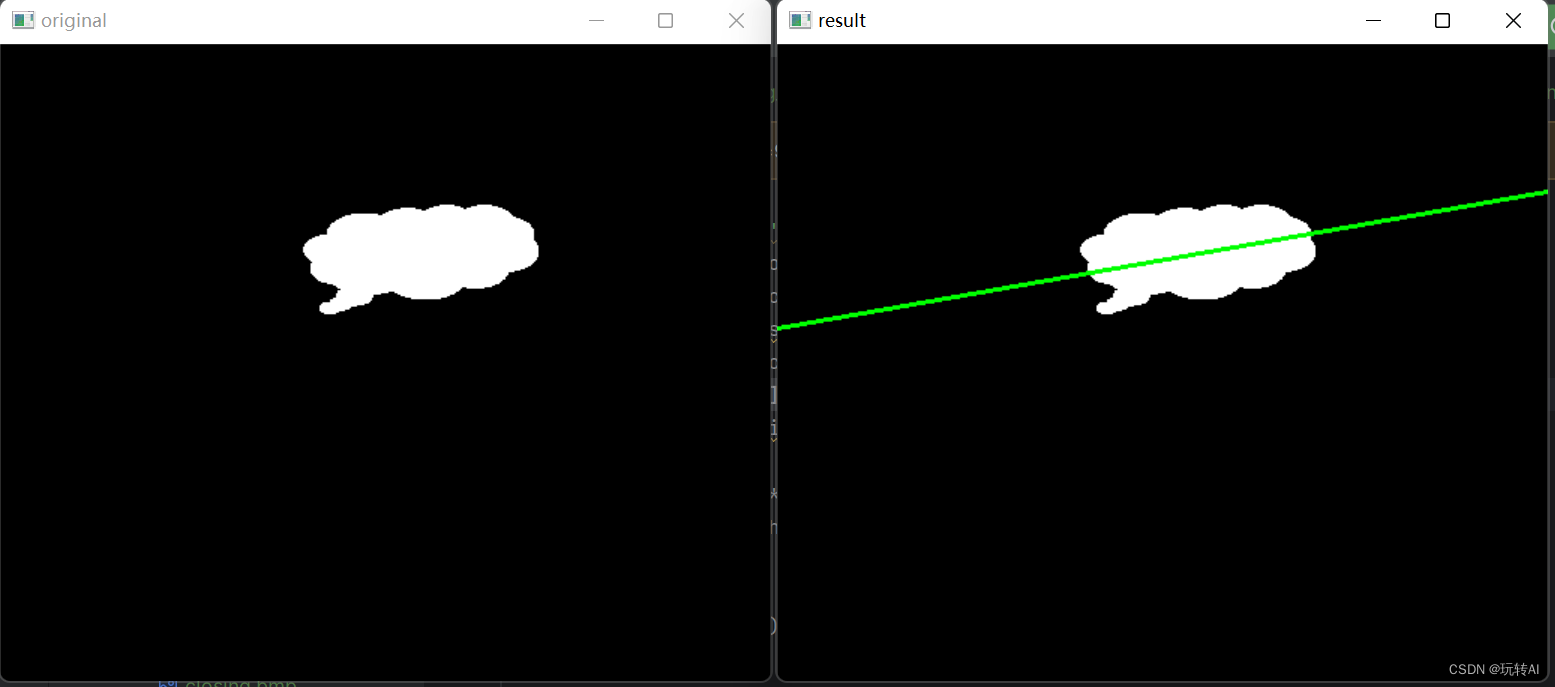
示例:使用函数 cv2.fitLine()构造最优拟合直线。
代码如下:
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
rows,cols = o.shape[:2]
[vx,vy,x,y] = cv2.fitLine(contours[0], cv2.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv2.line(o,(cols-1,righty),(0,lefty),(0,255,0),2)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
最小外包三角形
在 OpenCV 中,函数 cv2.minEnclosingTriangle()用来构造最小外包三角形。该函数的语法格式为:
retval, triangle = cv2.minEnclosingTriangle( points )
式中有两个返回值:
- retval:最小外包三角形的面积。
- triangle:最小外包三角形的三个顶点集。
式中的参数 points 是轮廓。
示例:使用函数 cv2.minEnclosingTriangle()构造最小外包三角形。
代码如下:
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#
area,trgl = cv2.minEnclosingTriangle(contours[0])
print("area=",area)
print("trgl:",trgl)
for i in range(0, 3):
cv2.line(o, tuple(trgl[i][0]),tuple(trgl[(i + 1) % 3][0]), (255,255,255), 2)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行报错:
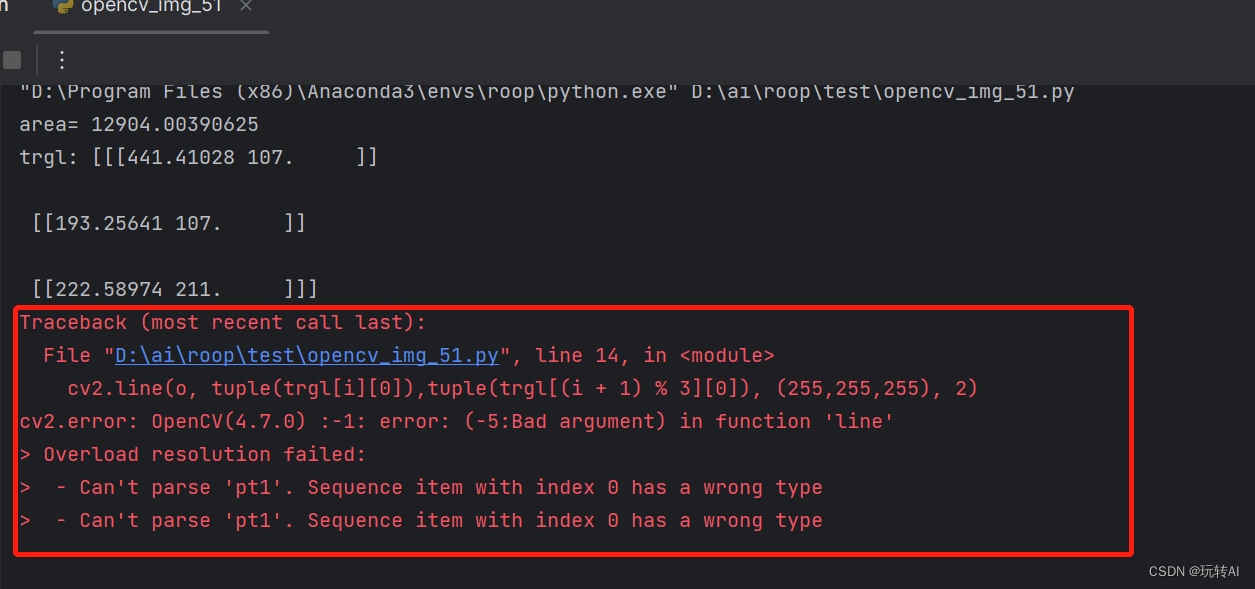
提示我们opecv4.7 这个版本里line 这个函数传入的参数值类型变了,现在的类型不支持。我们转换一下类型再试试
代码如下:
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original", o)
gray = cv2.cvtColor(o, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#
area, trgl = cv2.minEnclosingTriangle(contours[0])
print("area=", area)
print("trgl:", trgl)
for i in range(0, 3):
original_coordinate = tuple(trgl[i][0])
original_coordinate2 = tuple(trgl[(i + 1) % 3][0])
# 将坐标的每个分量分别转换为整数
x_int = int(original_coordinate[0])
y_int = int(original_coordinate[1])
x_int2 = int(original_coordinate2[0])
y_int2 = int(original_coordinate2[1])
# 将坐标转换为整数,
coordinate_as_int = (x_int, y_int)
coordinate_as_int2 = (x_int2, y_int2)
cv2.line(o, coordinate_as_int, coordinate_as_int2, (255, 255, 255), 2)
cv2.imshow("result", o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果如下:
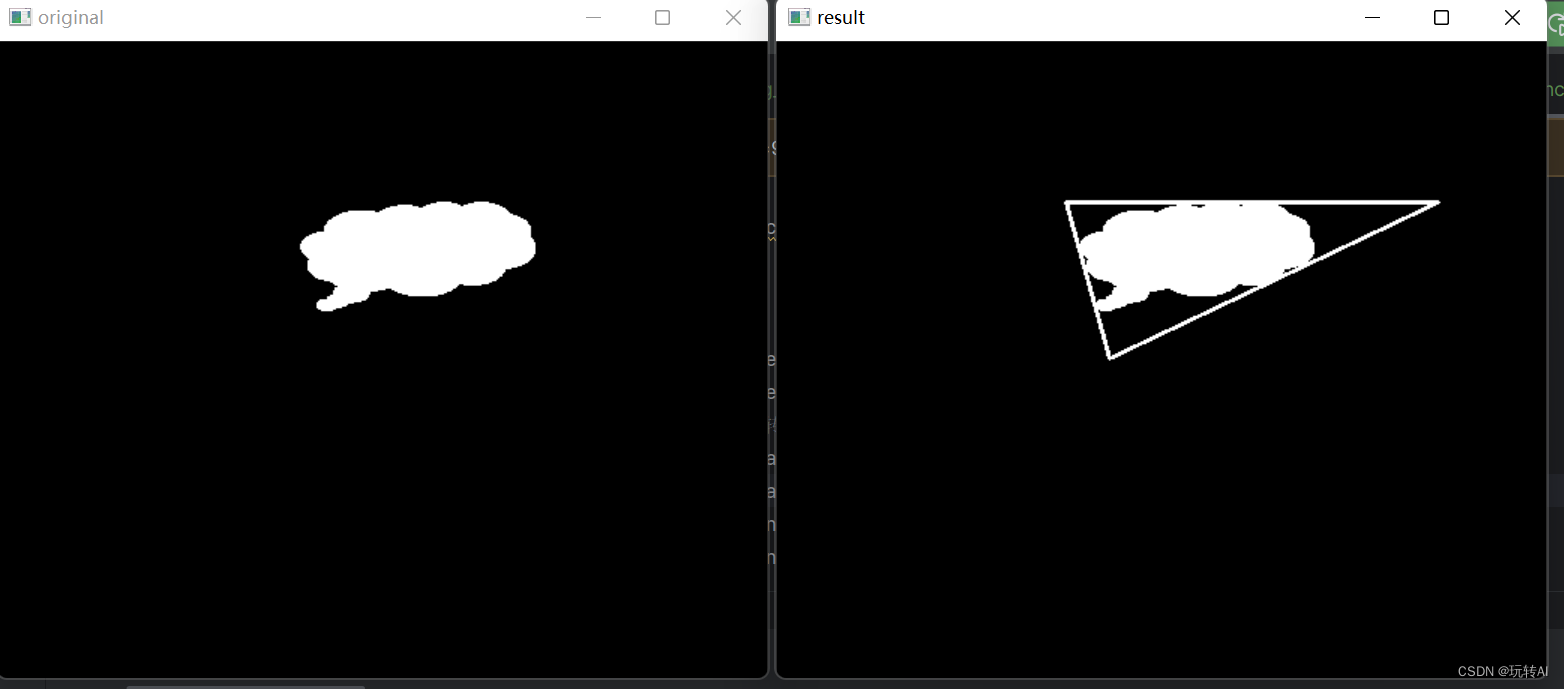
从上述结果可以看出:
- 返回值 area 是最小外包三角形的面积。
- 返回值 trgl 是最小外包三角形的三个顶点。
逼近多边形
函数 cv2.approxPolyDP()用来构造指定精度的逼近多边形曲线。该函数的语法格式为:
approxCurve = cv2.approxPolyDP( curve, epsilon, closed )
式中,返回值 approxCurve 为逼近多边形的点集。
式中的参数如下:
- curve 是轮廓。
- epsilon 为精度,原始轮廓的边界点与逼近多边形边界之间的最大距离。
- closed 是布尔型值。该值为 True 时,逼近多边形是封闭的;否则,逼近多边形是不封闭的。
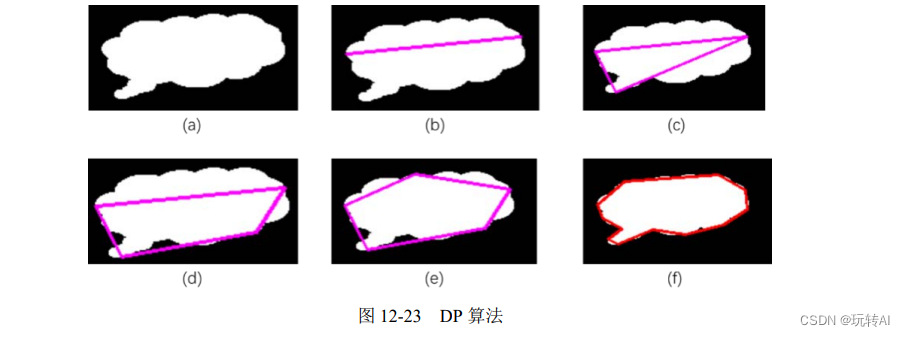
函数 cv2.approxPolyDP()采用的是 Douglas-Peucker 算法(DP 算法)。
以图 12-23 为例,该算法首先从轮廓中找到距离最远的两个点,并将两点相连(见图 12-23 的(b)图)。
接下来,在轮廓上找到一个离当前直线最远的点,并将该点与原有直线连成一个封闭的多边形,此时得到一个三角形,如图 12-23 中的©图所示。
将上述过程不断地迭代,将新找到的距离当前多边形最远的点加入到结果中。当轮廓上所有的点到当前多边形的距离都小于函数 cv2.approxPolyDP()的参数 epsilon 的值时,就停止迭代。最终可以得到如图 12-23 的(f)图所示的处理结果。
通过上述过程可知,epsilon 是逼近多边形的精度信息。通常情况下,将该精度设置为多边形总长度的百分比形式。
示例:使用函数 cv2.approxPolyDP()构造不同精度的逼近多边形。
代码如下:
import cv2
#----------------读取并显示原始图像-------------------------------
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
#----------------获取轮廓-------------------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#----------------epsilon=0.1*周长-------------------------------
adp = o.copy()
epsilon = 0.1*cv2.arcLength(contours[0],True)
approx = cv2.approxPolyDP(contours[0],epsilon,True)
adp=cv2.drawContours(adp,[approx],0,(0,0,255),2)
cv2.imshow("result0.1",adp)
#----------------epsilon=0.09*周长-------------------------------
adp = o.copy()
epsilon = 0.09*cv2.arcLength(contours[0],True)
approx = cv2.approxPolyDP(contours[0],epsilon,True)
adp=cv2.drawContours(adp,[approx],0,(0,0,255),2)
cv2.imshow("result0.09",adp)
#----------------epsilon=0.055*周长-------------------------------
adp = o.copy()
epsilon = 0.055*cv2.arcLength(contours[0],True)
approx = cv2.approxPolyDP(contours[0],epsilon,True)
adp=cv2.drawContours(adp,[approx],0,(0,0,255),2)
cv2.imshow("result0.055",adp)
#----------------epsilon=0.05*周长-------------------------------
adp = o.copy()
epsilon = 0.05*cv2.arcLength(contours[0],True)
approx = cv2.approxPolyDP(contours[0],epsilon,True)
adp=cv2.drawContours(adp,[approx],0,(0,0,255),2)
cv2.imshow("result0.05",adp)
#----------------epsilon=0.02*周长-------------------------------
adp = o.copy()
epsilon = 0.02*cv2.arcLength(contours[0],True)
approx = cv2.approxPolyDP(contours[0],epsilon,True)
adp=cv2.drawContours(adp,[approx],0,(0,0,255),2)
cv2.imshow("result0.02",adp)
#----------------等待释放窗口-------------------------------
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:

从程序运行结果可以看出,在函数 cv2.approxPolyDP()中通过参数 epsilon 可以控制逼近多边形的精度。
需要注意:本节中使用的图像都是仅有一个轮廓的图像,处理的轮廓都是 contours[0]。如果处理的原图像中有多个轮廓,则需要注意控制轮廓的索引,即 contours[i]中的 i 值,使其指向特定的轮廓。
实验原图