文章目录
- 1 前言
- 2 安装
- 3 查找自己的IMU话题
- 4 imu_tools滤波
1 前言
imu_filter_madgwick:一种滤波器,可将来自常规IMU设备的角速度,加速度和磁力计读数(可选)融合到一个方向中。基于工作:http://www.x-io.co.uk/open-source-imu-and-ahrs-algorithms/
imu_complementary_filter:一种滤波器,它使用一种基于互补融合的新颖方法,将来自通用IMU设备的角速度,加速度和磁力计读数(可选)融合到方向四元数中。基于文献:http://www.mdpi.com/1424-8220/15/8/19302
rviz_imu_plugin:rviz插件,可显示sensor_msgs::Imu消息。
ROS org imu_tools官方介绍地址:http://wiki.ros.org/imu_tools
github源代码地址:https://github.com/ccny-ros-pkg/imu_tools
2 安装
From binaries
This repo has been released into all current ROS1 and ROS2 distros. To install, simply:
sudo apt-get install ros-<YOUR_ROSDISTO>-imu-tools
From source (ROS1)
Create a catkin workspace (e.g., ~/catkin_ws/) and source the devel/setup.bash file.
Make sure you have git installed:
sudo apt-get install git
Clone this repository into your catkin workspace (e.g., ~/catin_ws/src; use the proper branch for your distro, e.g., melodic, noetic, …):
git clone -b <YOUR_ROSDISTO> https://github.com/CCNYRoboticsLab/imu_tools.git
Install any dependencies using rosdep.
rosdep install imu_tools
Compile the stack:
cd ~/catkin_ws
catkin_make
3 查找自己的IMU话题
rostopic list
4 imu_tools滤波
修改imu_tools文件
打开文件:
~/imu_tools_ws/src/imu_tools/imu_complementary_filter/src/complementary_filter_ros.cpp,有如下代码:
// Register IMU raw data subscriber.
imu_subscriber_.reset(new ImuSubscriber(nh_, ros::names::resolve("imu") + "/data_raw", queue_size));
可以看出,imu_tools订阅的topic为imu/data_raw,而IMU发布的topic为/imu_data,因此需要修改代码,使topic一致:
将imu订阅的话题改为自定义的话题名称即可:
// Register IMU raw data subscriber.
imu_subscriber_.reset(new ImuSubscriber(nh_, "/imu_data", queue_size));
然后,修改launch文件
打开launch文件:~/imu_tools_ws/src/imu_tools/imu_complementary_filter/launch/complementary_filter.launch,进行一些修改:
前半部分已省略
重点修改以下部分的内容
<!-- ComplementaryFilter launch file -->
<launch>
#### Complementary filter
<node pkg="imu_complementary_filter" type="complementary_filter_node"
name="complementary_filter_gain_node" output="screen">
<param name="do_bias_estimation" value="true"/>
<param name="do_adaptive_gain" value="true"/>
<param name="use_mag" value="false"/>
<param name="gain_acc" value="0.01"/>
<param name="gain_mag" value="0.01"/>
<param name="publish_debug_topics" value="false"/>
<param name="publish_tf" value="true"/>
</node>
</launch>
重新编译:catkin_make, 然后 source ~/.bashrc
开一个终端运行imu_tools中的launch文件,若正常运行不报错则已经开始了滤波操作
roslaunch imu_complementary_filter complementary_filter.launch
在rqt中进行可视化
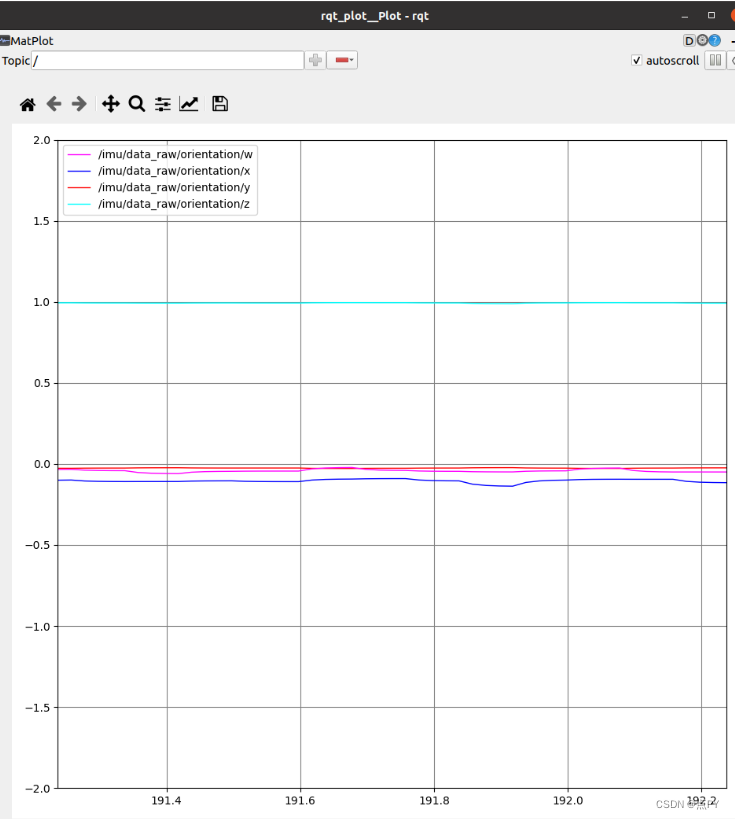
PS:在rqt_plot中添加想要可视化的数据时,格式为话题名称+对应的数据名称,例如/imu/data/orientation











![“OSError: [WinError 1455]页面文件太小,无法完成操作。”解决方案](https://img-blog.csdnimg.cn/6862885665e44cb385ac97262d9d0434.png)