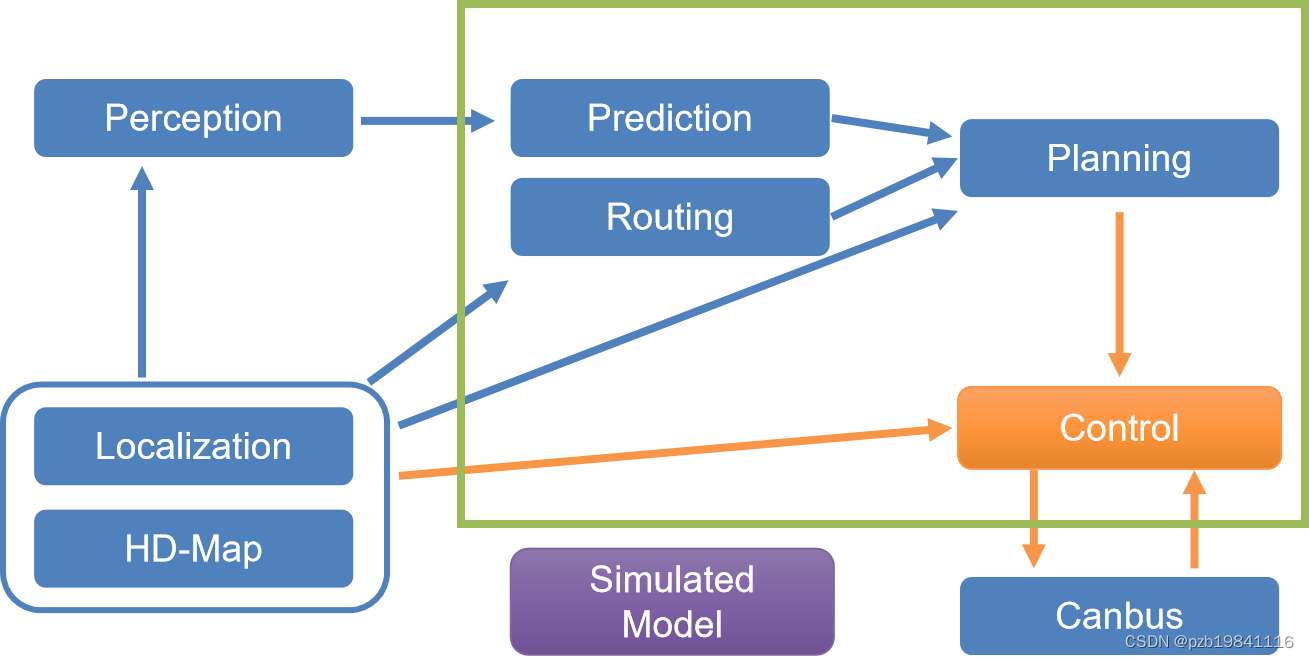
PNC
PNC=Planning and Control,
其中包括:预测、全局路径规划、计划(决策、路径规划、速度)及控制。
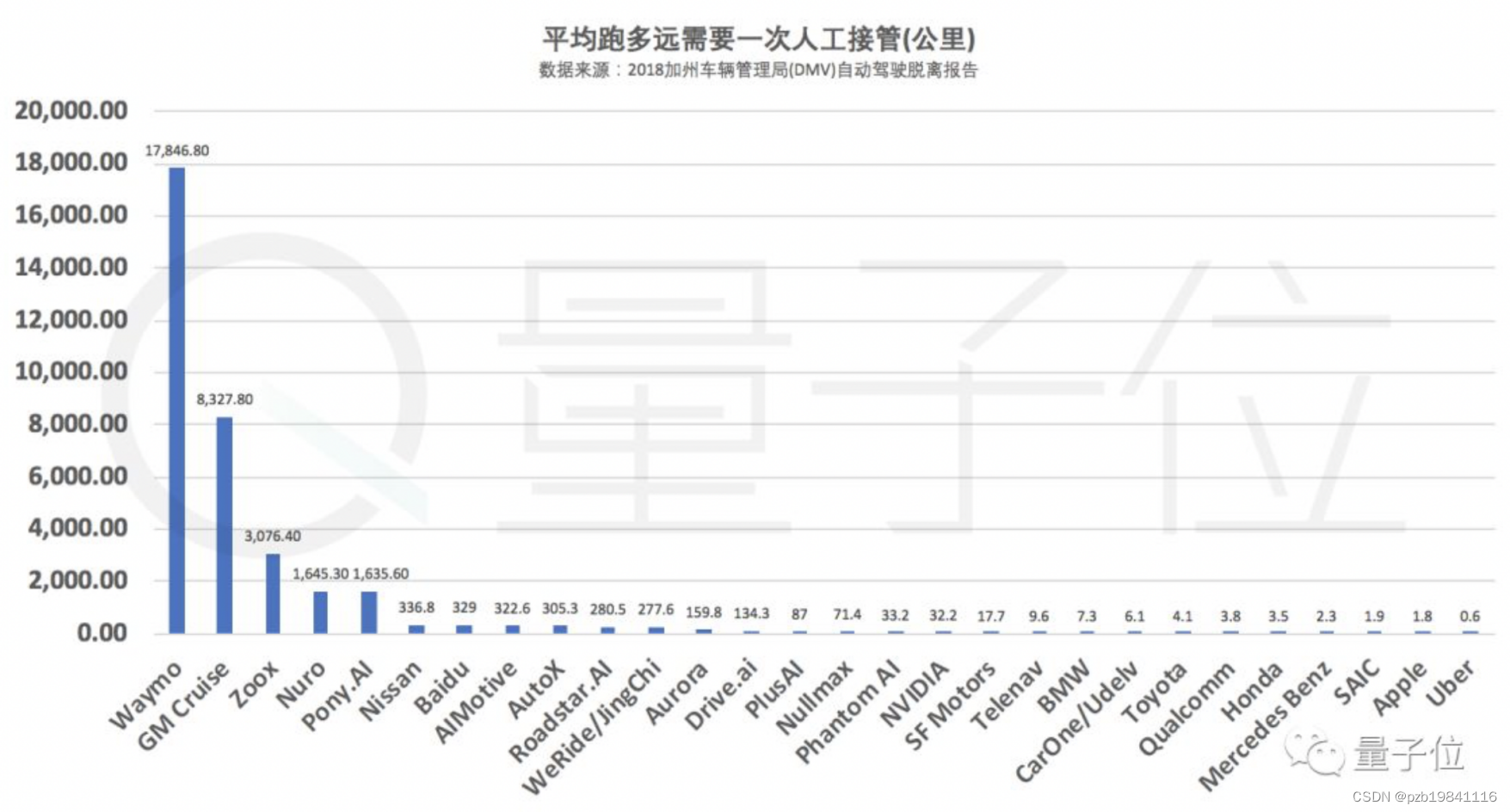
各公司无人驾驶的整体水平
预测
很多无人驾驶的工作都需要给予预测的结果。预测的需求是准确率和实时性,难点是较为少见的情况预测(corner case)
预测的两大方法:
基于模型的方法:结合人类的先验知识,可以解决较为少见的情况;基于数据驱动的方法:本质是机器学习,数据越多效果越好。

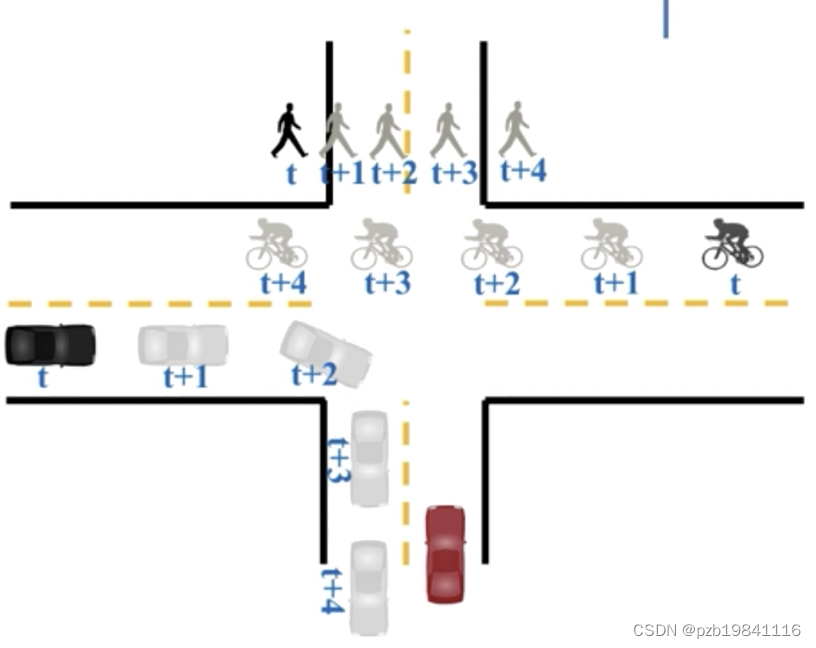
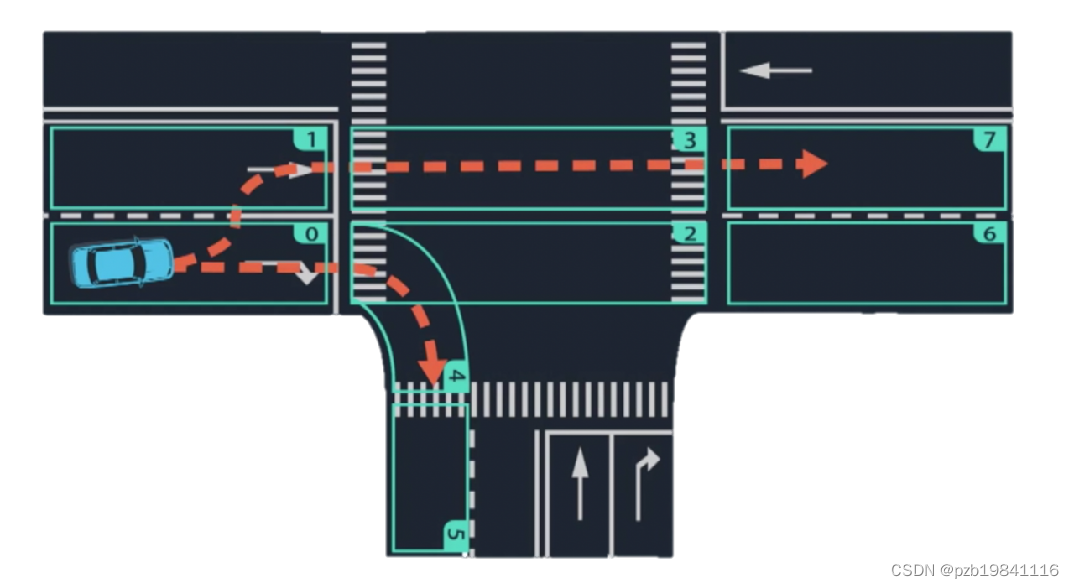
车辆预测中的车道模型
首先对线路进行分段,对每段中的车道进行编号。再对各种可能的行驶线路进行分类,计算每种的概率。
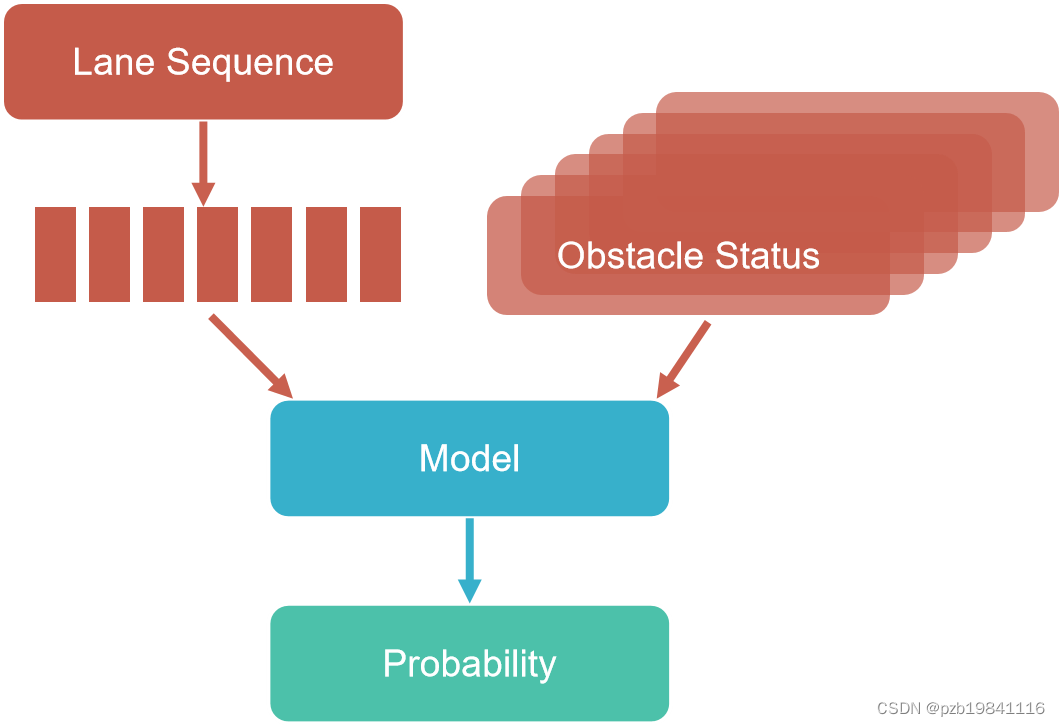
车道模型包含三个部分。
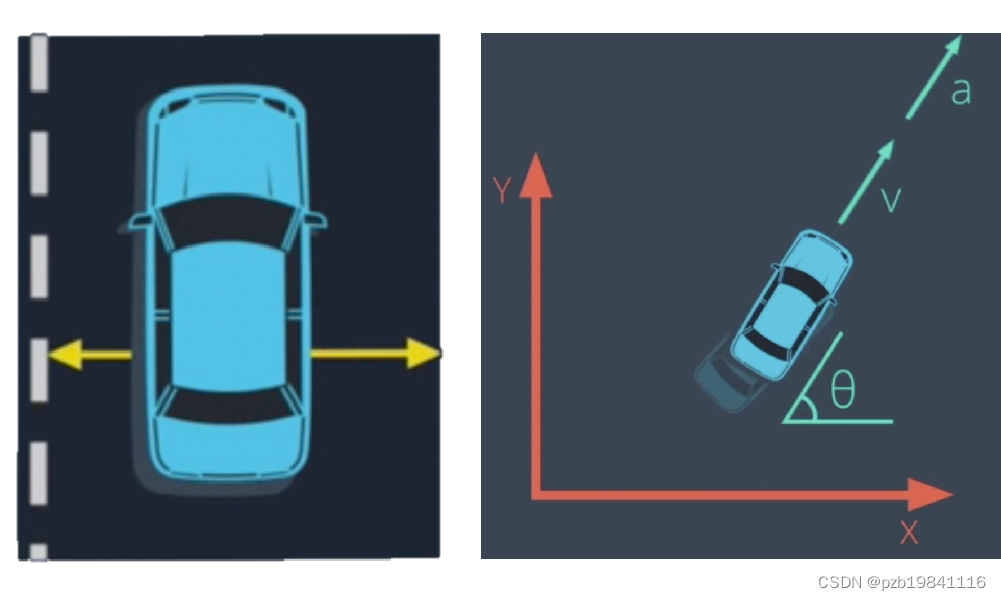
车道特征:与起点的距离、与中心线的偏离值,参考线,转弯曲率,交通法;车辆状态:车速,加速度,朝向角度,朝向角速度,车辆类型,尺寸;环境:自然环境,车道周围的环境。
车道模型的输入数据为序列,则使用的网络为RNN
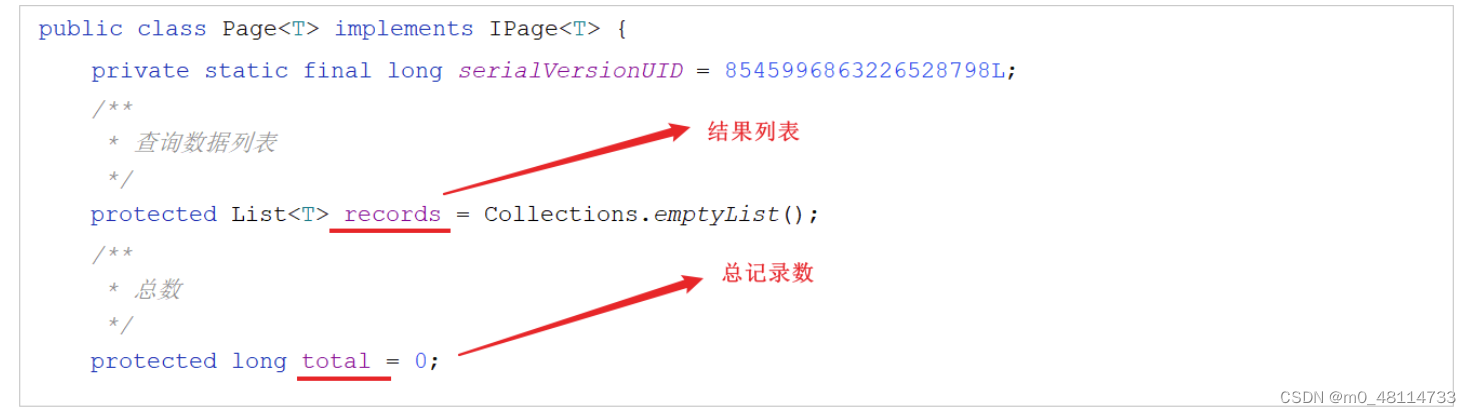
Apollo的模型

DATA PIPELINE
包括样本工程、模型优化和特征工程
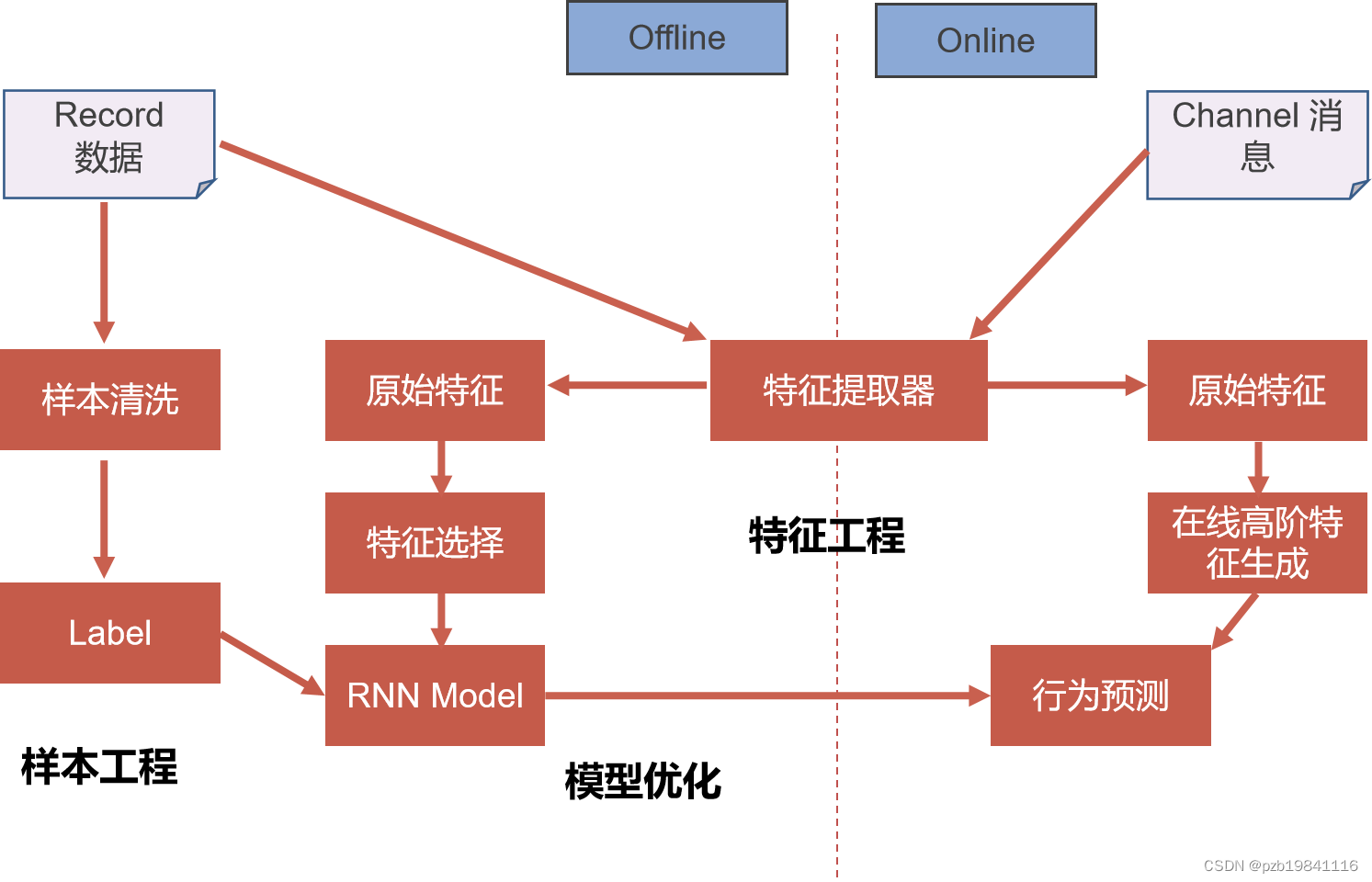
其中数据的自编码较为重要

轨迹建立的几种方法
1.卡尔曼滤波;2.多项式拟合;3.动力模型

STATE OF THE ART
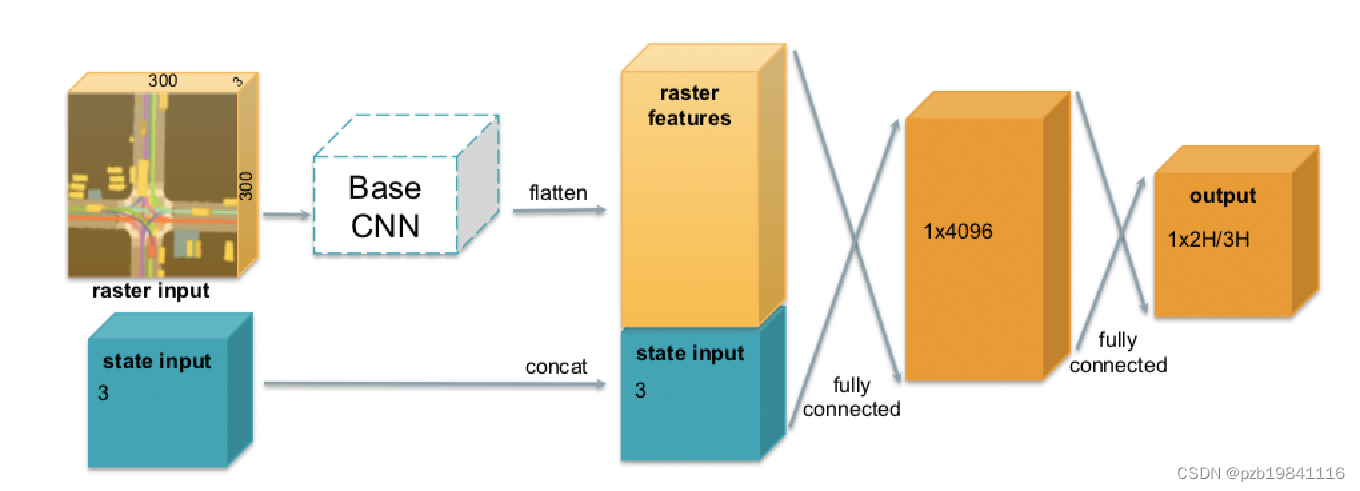
Uber提出的模型。基于CNN的方法,实现图生成和轨迹生成。
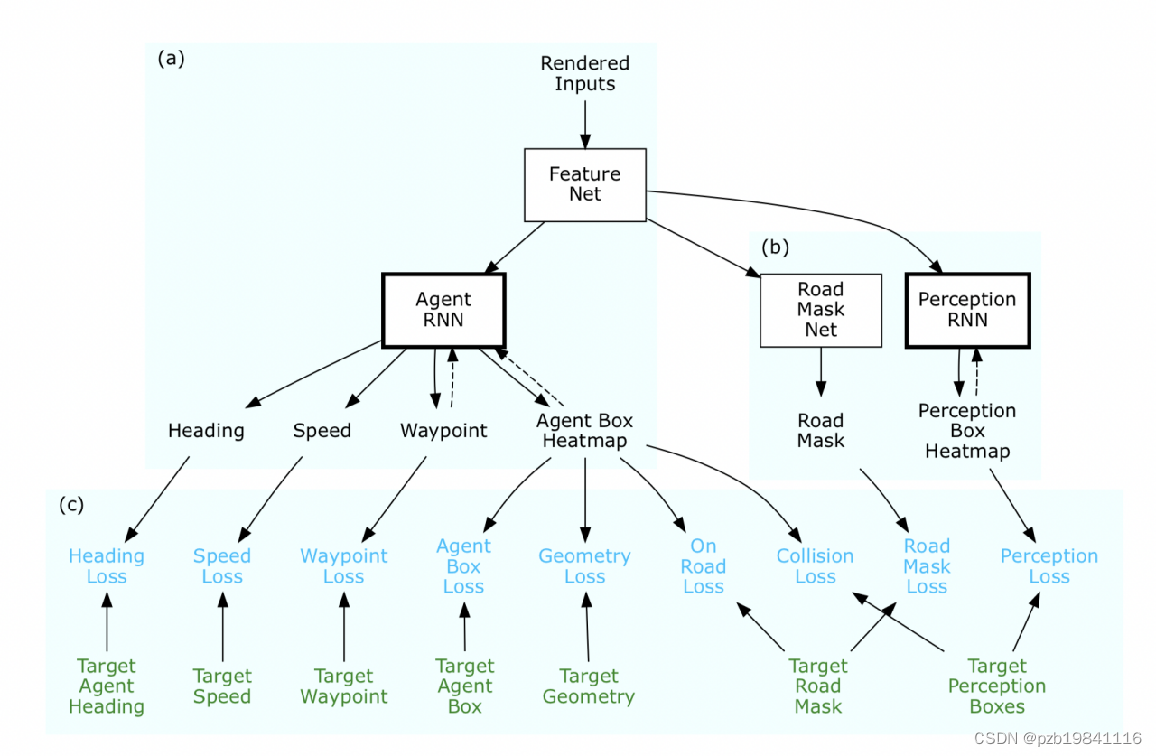
Waymo提出的ChauffeurNet。中级到中级的学习,多任务受限的学习,结合了预测与规划两部分工作。

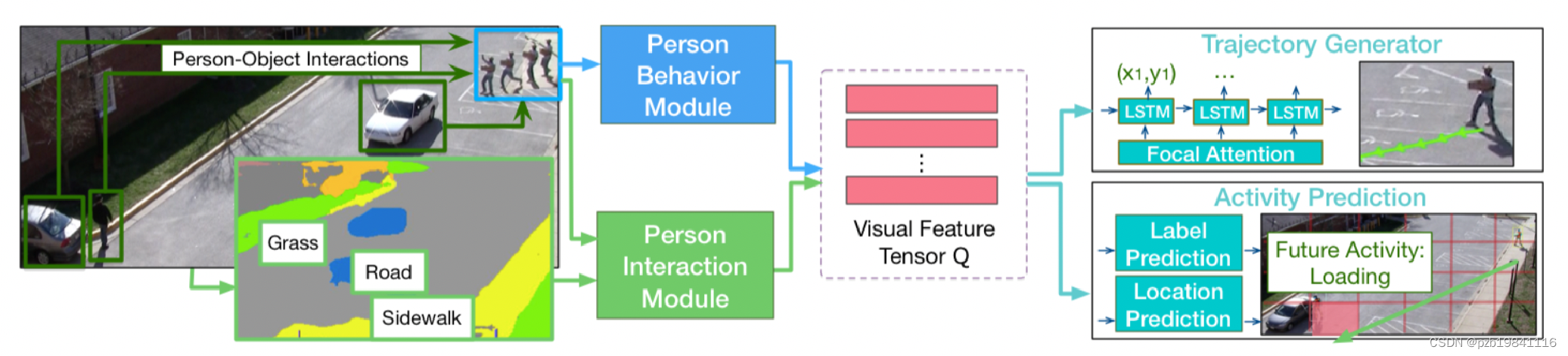
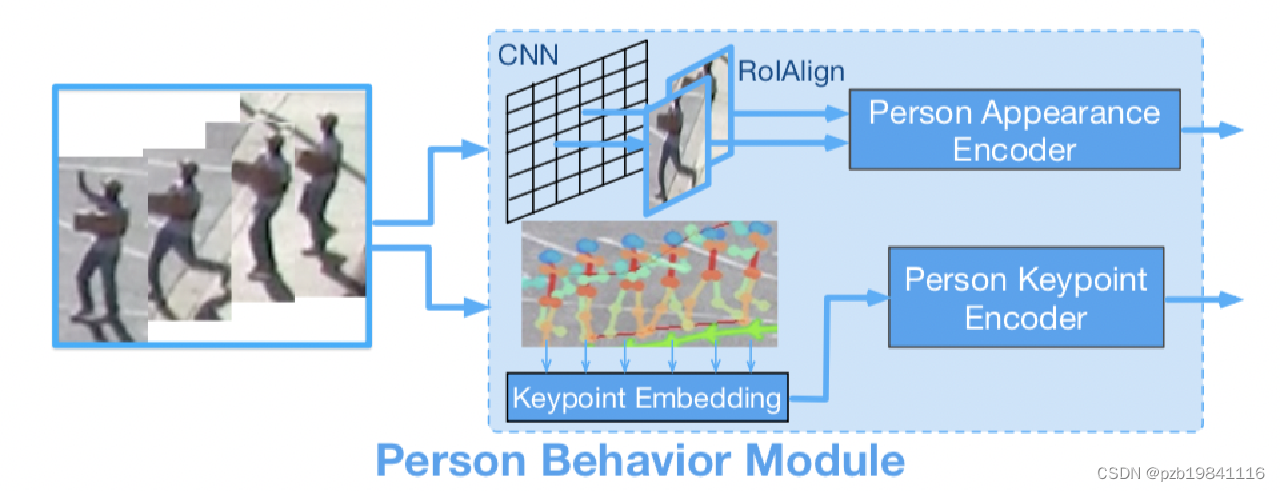
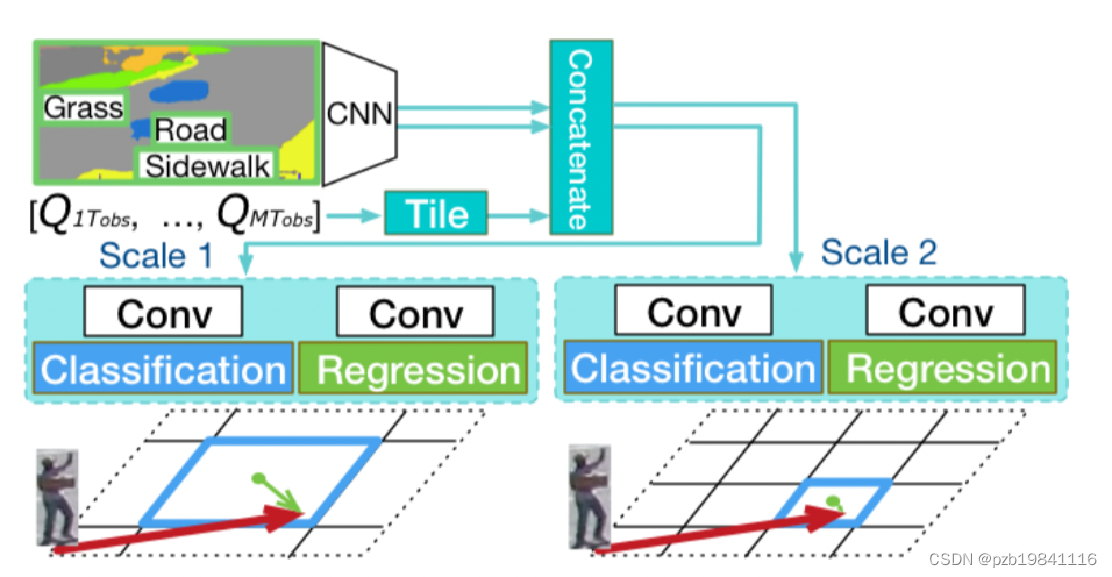
行人预测
特点是高度的随机性、较低的交通约束、自由度高没什么运动约束。

代表工作:
李飞飞团队在这方面的建树颇丰,发了很多顶会。
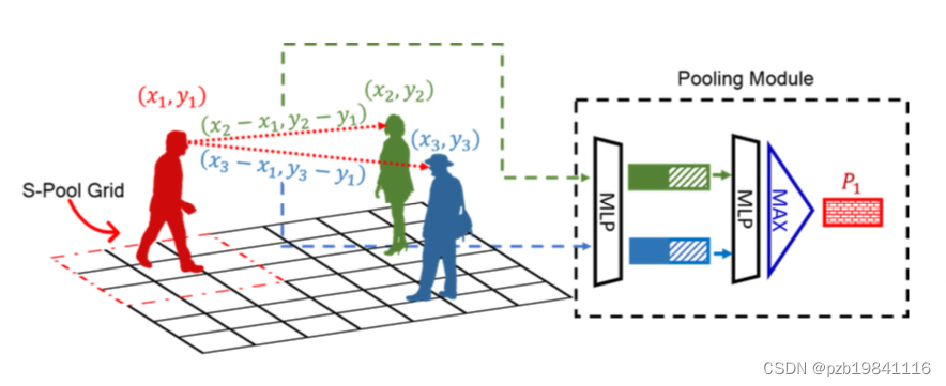
Social LSTM,提出了Social-pooling

Social GAN。引入了GAN模型,设计出了人-人之间的交互。

另外一篇文章,引入了多任务学习,网格地图,并融合了感知与预测