文章目录
- 前言
- 相关代码整理:
- 相关文章:
- 基本概念
- 概率路线图(Probabilistic Road Map)
- 基本流程
- 预处理阶段
- 查询阶段
- 优缺点(pros&cons)
- 一些改进算法
- Lazy collision-checking
- Rapidly-exploring Random Tree
- 算法伪代码
- 一些改进算法
- KD-tree
- Bidirectional RRT / RRT Connect
- Optimal sampling-based path planning methods
- Rapidly-exploring Random Tree*
- Kinodynamic-RRT*
- Anytime-RRT*
- Advanced Sampling-based Methods
- Informed RRT*
- 流程
- Cross-entropy motion planning
- 其他变种
- 实践
- 作业思路
- MATLAB
- RRT
- RRT*
- Goal-bias RRT*
前言
本文部分内容参考了深蓝学院的移动机器人运动规划,依此做相关的笔记与整理。之前的文章也有对基于采样的算法进行过介绍,所以本文并不着重介绍这类算法的基本概念,主要是对之前文章的一些补充。
相关代码整理:
- https://gitee.com/lxyclara/motion-plan-homework/
- https://github.com/KailinTong/Motion-Planning-for-Mobile-Robots/blob/master
- https://gitee.com/aries-wu/Motion-plan/blob/main/
- 链接: https://pan.baidu.com/s/1UtVHRxDq771LfSGK_21wgQ?pwd=rhtp 提取码: rhtp
相关文章:
自动驾驶路径规划——基于概率采样的路径规划算法(PRM)https://blog.csdn.net/sinat_52032317/article/details/127177278
自动驾驶路径规划——基于概率采样的路径规划算法(RRT、RRT*)https://blog.csdn.net/sinat_52032317/article/details/127197120
基本概念
规划完备性概念
- Complete Planner: always answers a path planning query correctly in bounded time
- Probabilistic Complete Planner: if a solution exists, planner will eventually find it, using random sampling (e.g. Monte Carlo sampling)
- Resolution Complete Planner: same as above but based on a deterministic sampling (e.g sampling on a fixed grid).【采样更确定】
概率路线图(Probabilistic Road Map)
之前的这篇博客已经有过介绍以及代码示例:自动驾驶路径规划——基于概率采样的路径规划算法(PRM)
基本流程
一般可以分为两个阶段:预处理阶段(Learing phase/preprocess phase)和查询阶段(query phase)。
预处理阶段
- 初始化。设 G ( V , E ) G(V,E) G(V,E)为一个无向图,其中顶点集 V V V代表无碰撞的顶点集,连线集 E E E代表无碰撞路径。初始状态为空。
- 构型采样。从构型空间中采样一个无碰撞的点 a ( i ) a(i) a(i)并加入到顶点集 V V V 中。
- 领域计算。定义距离 ρ ρ ρ,对于已经存在于顶点集 V V V中的点,如果它与 a ( i ) a(i) a(i) 的距离小于 ρ ρ ρ,则将其称作点 a ( i ) a(i) a(i)的邻域点。
- 边线连接。将点 a ( i ) a(i) a(i)与其领域点相连,生成连线 τ τ τ 。
- 碰撞检测。检测连线 τ τ τ 是否与障碍物发生碰撞,如果无碰撞,则将其加入到连线集 E E E 中。
- 结束条件。当所有采样点(满足采样数量要求)均已完成上述步骤后结束,否则重复2-5。

查询阶段
采用AStar或Dijkstra等算法从起点到终点进行搜索。

优缺点(pros&cons)
更详细的特点总结在之前的博客中已经阐述过了,这里只列出几点关键的。
优点:
- 概率完备性
- 应对高维空间规划效率高
- 不易陷入局部最小值
缺点:
- 还未考虑边界值问题(运动学约束)
- 分为两阶段式的算法冗长。
一些改进算法
Lazy collision-checking
改进点:
在采点建图时不做碰撞检测处理,在后续Search阶段才进行碰撞检测处理。若检测到碰撞,删除路径中碰撞的点与边,重构路线图,再次进行搜索,直到找到一条路径。
以下是示意图



Rapidly-exploring Random Tree
之前的这篇博客已经有过介绍以及代码示例:自动驾驶路径规划——基于概率采样的路径规划算法(RRT、RRT*)
算法伪代码

一些改进算法
KD-tree
参考:https://blog.csdn.net/junshen1314/article/details/51121582
利用kd-tree查找最近的节点(每次找中位数)


Bidirectional RRT / RRT Connect
Bidirectional RRT / RRT Connect之前的这篇博客已经有过介绍:自动驾驶路径规划——基于概率采样的路径规划算法(RRT、RRT*)



Optimal sampling-based path planning methods
Rapidly-exploring Random Tree*
这部分同样可以参考自动驾驶路径规划——基于概率采样的路径规划算法(RRT、RRT*)
算法伪代码:

Kinodynamic-RRT*
考虑机器人的运动学约束

论文:Kinodynamic RRT*: Optimal Motion Planning for Systems with Linear Differential Constraints
https://arxiv.org/abs/1205.5088

Anytime-RRT*
在机器人运动过程中,一直在更新RRT*

Anytime Motion Planning using the RRT*https://ieeexplore.ieee.org/document/5980479
Advanced Sampling-based Methods
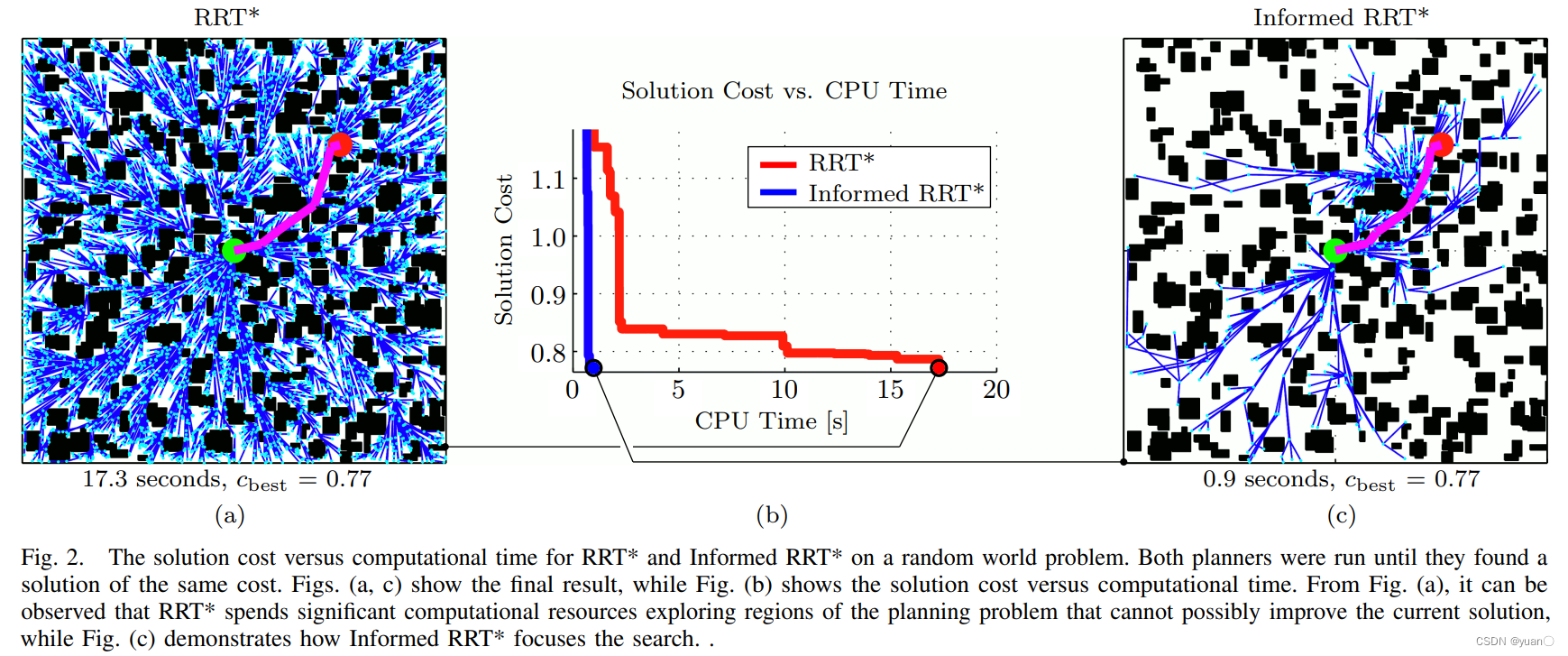
Informed RRT*
Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic
https://ieeexplore.ieee.org/abstract/document/6942976
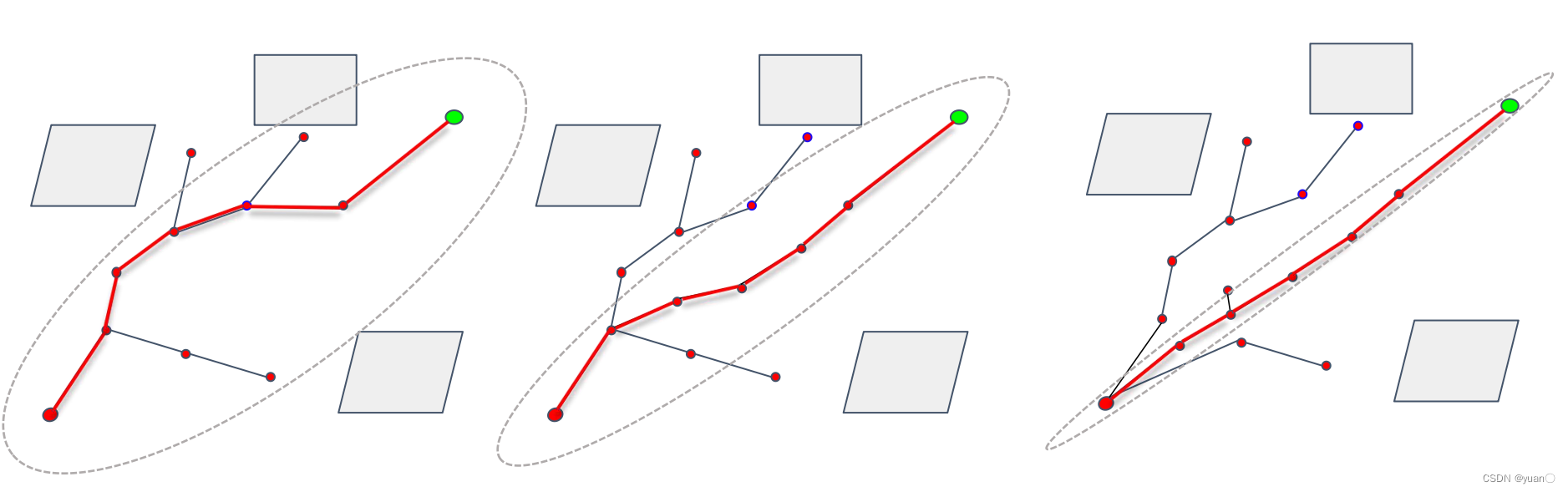
流程
当生成路径之后,以红色的点到绿色的点这段路径的长度(红色部分)为半长轴的两倍(2a),以红色点和绿色点作为焦点,生成椭圆。在椭圆的范围内进行采样与规划,重新生成路径后再次重复以上步骤。informed RRT*提升了规划速度,减少CPU运算时间,同时路径更为平滑。
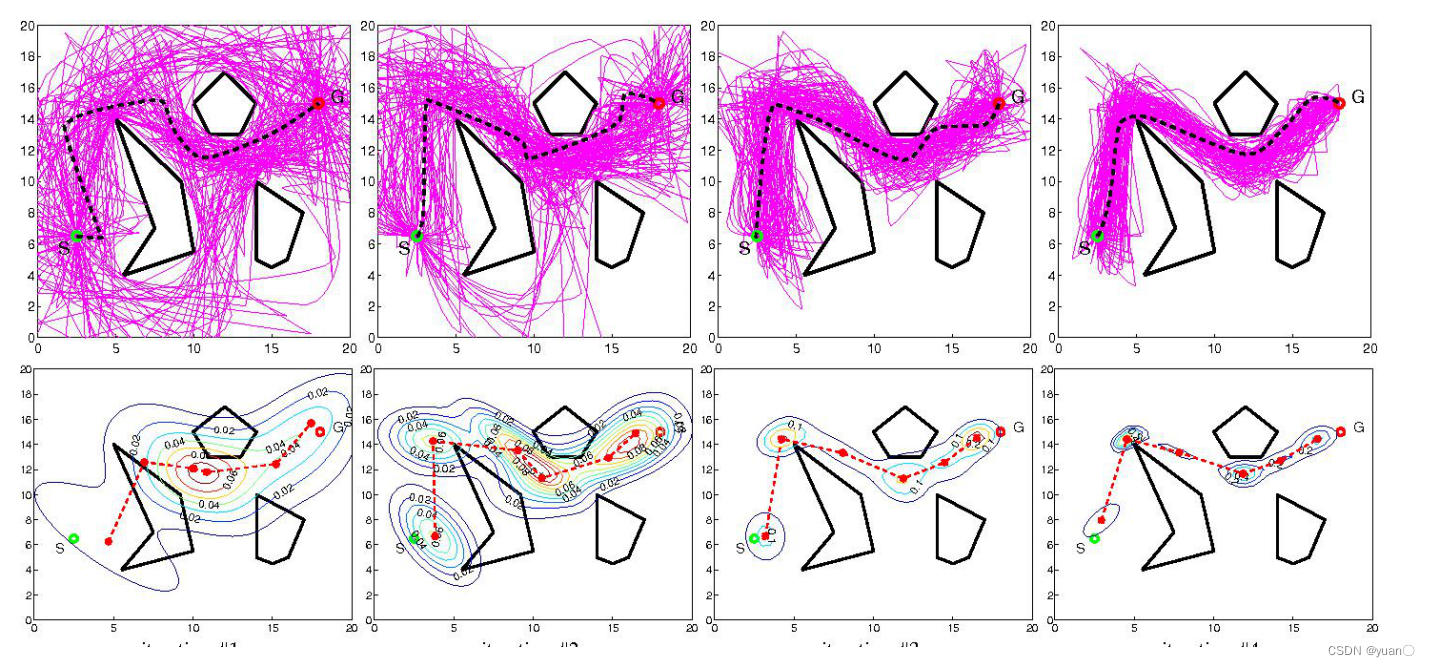
Cross-entropy motion planning
Cross-entropy motion planninghttps://ieeexplore.ieee.org/document/6301069
首先得到一个路径
然后以路径中的每个点作为一个高斯模型的中心,在多高斯模型中采样,得到多条路径。
然后对多条路径做均值,重新构建多高斯模型。

其他变种
• Lower Bound Tree RRT (LBTRRT)[a]
• Sparse Stable RRT[b]
• Transition-based RRT (T-RRT)[c]
• Vector Field RRT[d]
• Parallel RRT (pRRT)[e]
• Etc.[f]
[1] An Overview of the Class of Rapidly-Exploring Random Trees
[2] http://msl.cs.uiuc.edu/rrt/
[a] https://arxiv.org/pdf/1308.0189.pdf
[b] http://pracsyslab.org/sst_software
[c] http://homepages.laas.fr/jcortes/Papers/jaillet_aaaiWS08.pdf
[d] https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6606360
[e] https://robotics.cs.unc.edu/publications/Ichnowski2012_IROS.pdf
[f] https://github.com/zychaoqun
实践
[1] https://ompl.kavrakilab.org/
[2] https://moveit.ros.org/
[3] https://industrial-training-master.readthedocs.io/en/melodic/_source/session4/Motion-Planning-CPP.html
作业思路
[1] 第3章作业思路讲解1
[2] 第3章作业思路讲解2
MATLAB
RRT

RRT*

Goal-bias RRT*

PS:相关代码整理完后附上




![读书笔记-《ON JAVA 中文版》-摘要21第十九章 类型信息-2]](https://img-blog.csdnimg.cn/ab86a394f0774e33ba5f33b20ee2de1d.png)