| 项目名称 | 实验四 3D建模与仿真 | 成绩 | ||||||
| 内容:自定义机器人3D模型,创建一个URDF文件、xacro文件、ROS2[Kinetic/Melodic/Noetic]仿真 | ||||||||
| 实验记录(70分) 从头开始构建使用 URDF 的可视化机器人模型: 先尝试两个案例:01和07,输入如下命令:
在执行这条指令时候遇到问题如下:
图 报错 路径不准确,需要到对应功能包路径下,执行相应的指令。 请注意,上面的 roslaunch 行假设是从 urdf_tutorial 包目录执行它(即:urdf 目录是当前工作目录的直接子目录)。如果不是这种情况,01-myfirst.urdf 的相对路径将无效,一旦 roslaunch 尝试将 urdf 加载到参数服务器,就会收到错误。
同样可以打开07案例:
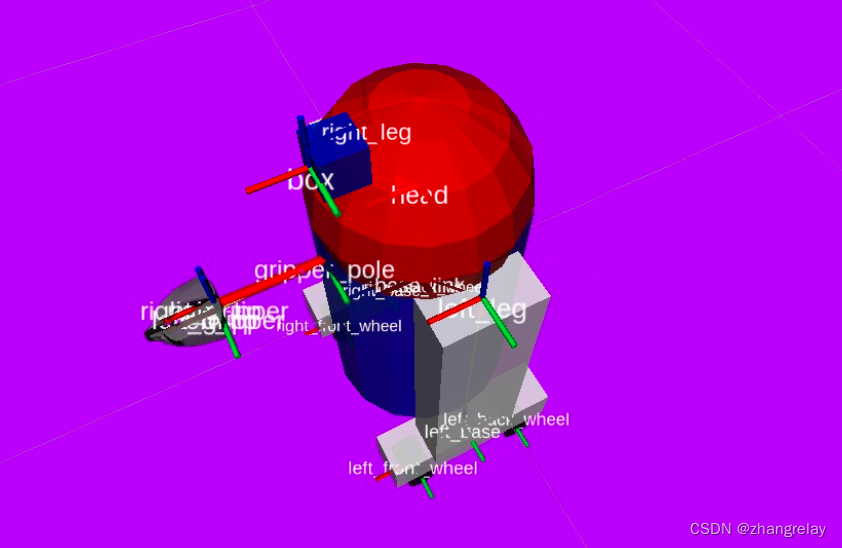
调整机器人模型,透明度,背景色等。
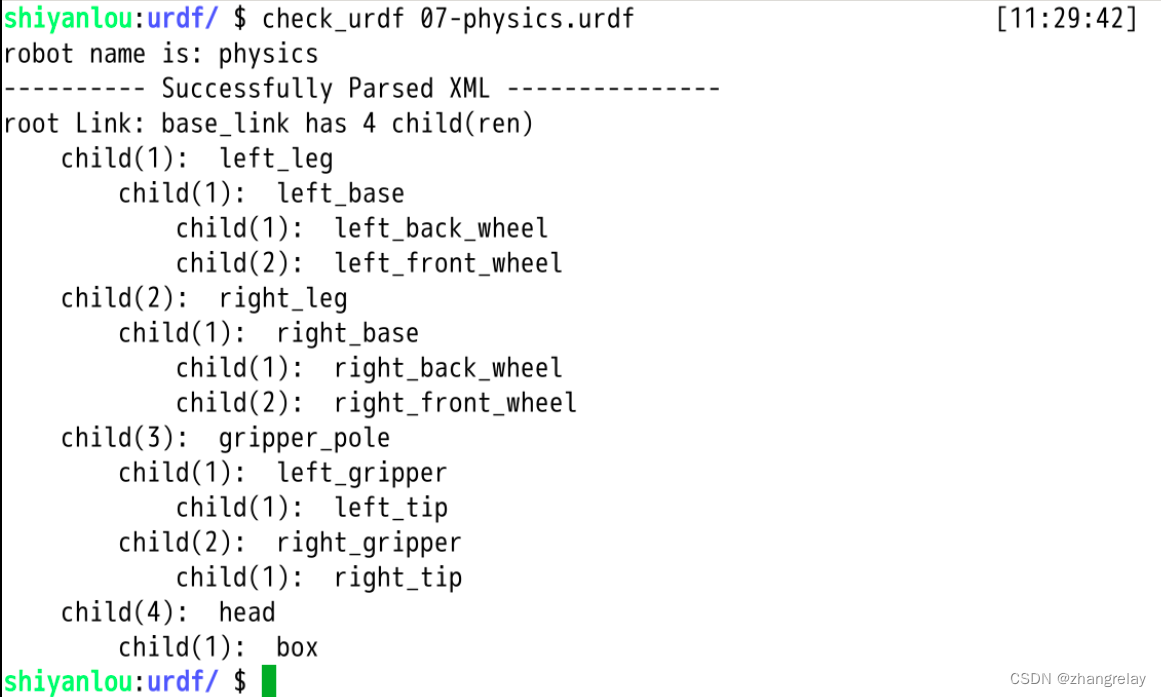
图 机器人模型显示 使用: Check_urdf
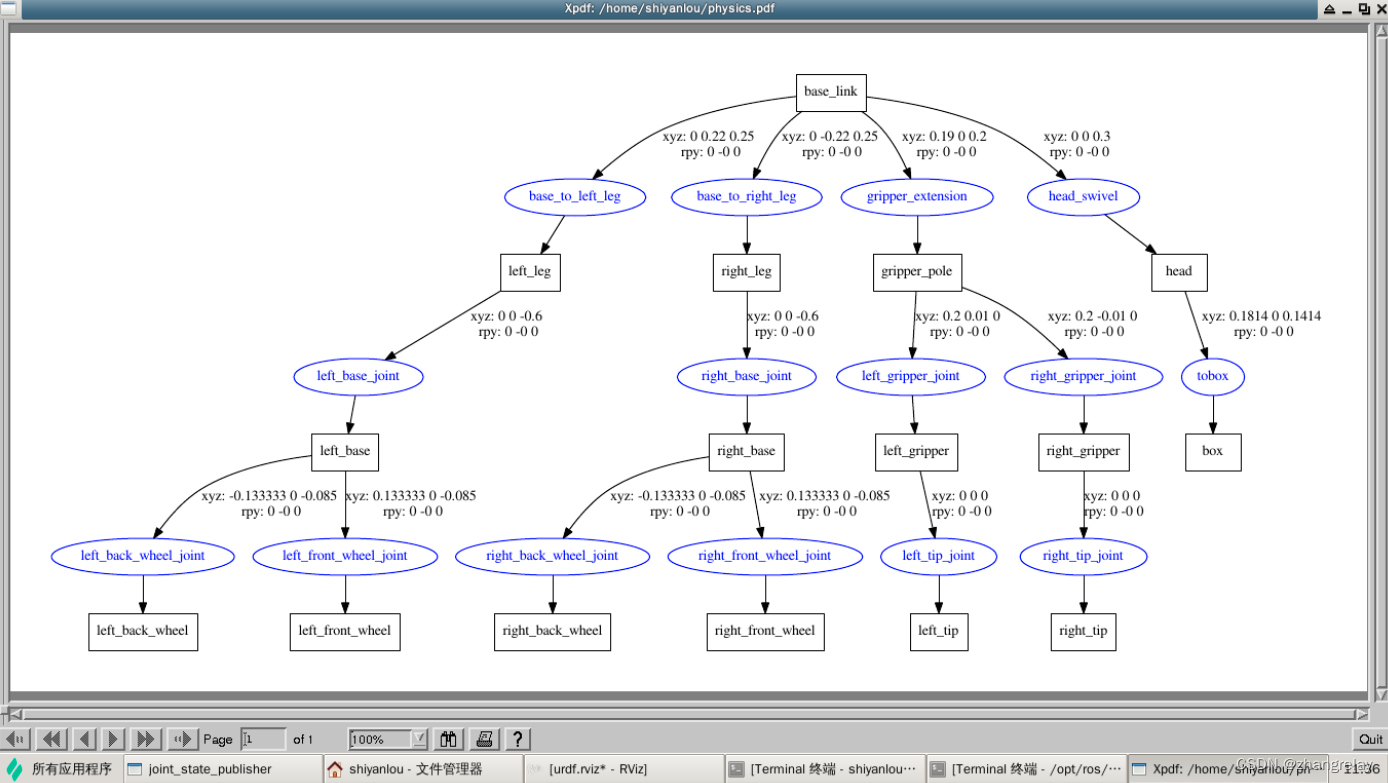
图 机器人各关节坐标系关联图 设置机器人颜色:
修改头为红色:
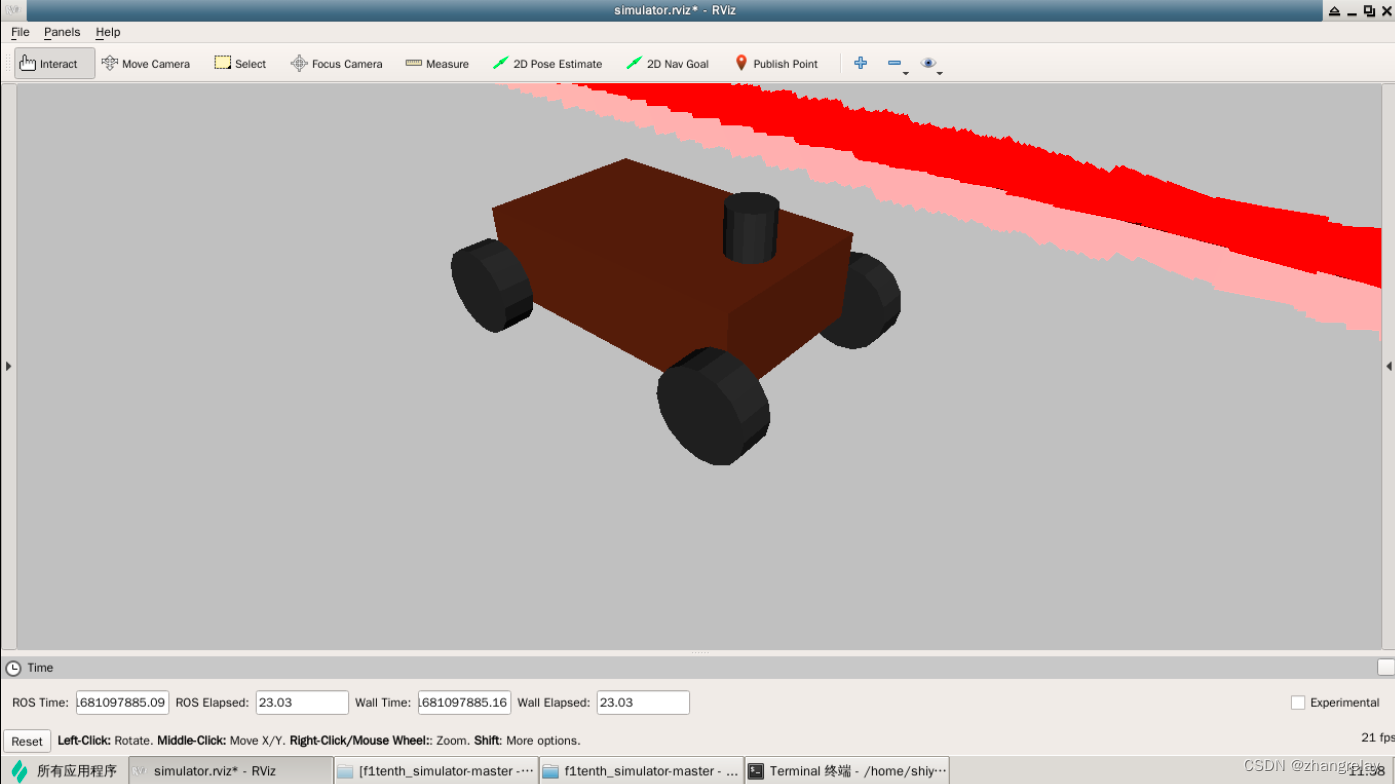
图 头换成红色 使用f1tenth模型(以coffee色为例): 包含一键配置和环境修改。
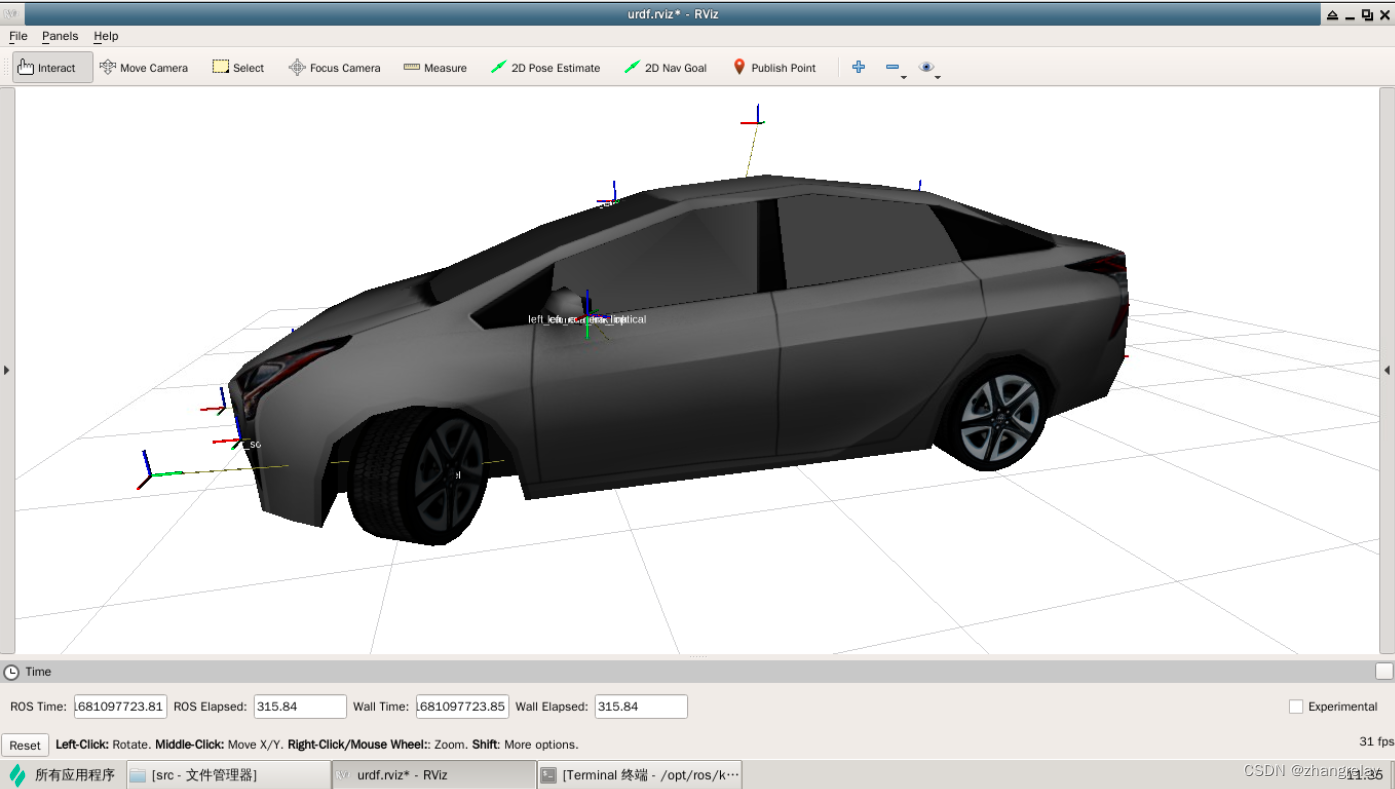
图 车身调整为咖啡色 过渡到真实汽车模型:
图 真实汽车三维模型 | ||||||||
| 思考题(30分):
Urdf和xacro都可以用来描述机器人模型,但是xacro具有更强的扩展性和可读性,并且可以使用变量和条件语句来动态生成模型。对于调整模型颜色,xacro更为方便,通过添加XML标签可以直接指定颜色属性,而在Urdf中需要编辑URDF文件的XML标签,较为繁琐。
三维机器人模型:urdf(xacro)标准化机器人描述格式(Unified Robot Description Format,URDF)是一种用于描述机器人及其部分结构、关节、自由度等的XML格式文件。每次在ROS中看到3D机器人都会有URDF文件与之对应,例如PR2(Willow Garage)或者Robonaut(NASA)。 可视化:rviz,ROS中的rviz或rqt_rviz工具。它集成了能够完成3D数据处理的OpenGL界面,能够将传感器数据在模型化世界(world)中展示,过程是先使用传感器坐标系读取测量值,再将这些读数按照之间的相对位置在正确的位置绘制。 仿真:Gazebo、V-Rep、Webots。 要在ROS中对机器人进行仿真,需要使用Gazebo。Gazebo(http://gazebosim.org/)是一种适用于复杂室内和室外环境的多机器人仿真环境。它能够在三维环境中对多个机器人、传感器及物体进行仿真,生成实际传感器的反馈以及物体之间的物理交互。 CoppeliaSim is the name of our new robot simulator. CoppeliaSim is 100% compatible with V-REP. It runs faster and has more features than V-REP. | ||||||||


蓝桥云课ROS机器人实验报告-04三维建模与仿真的大纲可能包括以下内容:
- ROS仿真环境介绍:介绍ROS仿真环境的概念、优点、常用工具和流程。
- Gazebo介绍:介绍Gazebo仿真器的概念、特点、使用方法和优势,以及与ROS的集成。
- 创建机器人模型:介绍如何使用Gazebo和ROS创建机器人的仿真模型,包括机器人的几何结构、运动学模型、动力学模型等。
- 机器人控制:介绍如何使用ROS控制机器人在仿真环境中运动和感知,以及与仿真模型进行交互。
- 传感器模拟:介绍如何使用Gazebo和ROS模拟机器人的传感器,如激光雷达、摄像头、GPS等,并采集传感器的数据。
- 数据可视化:介绍如何使用ROS的可视化工具,如rqt_plot、rqt_image等,将机器人的状态和传感器数据可视化。
- 实验练习:学生需要根据给定的机器人硬件设备和控制需求,设计机器人的仿真模型和控制程序,并在Gazebo和ROS环境中进行仿真和调试。
以上是蓝桥云课ROS机器人实验报告-04三维建模与仿真大纲的一个大致框架,具体内容可能会根据实验的目的和实际情况进行调整。
蓝桥云课ROS机器人实验报告-04三维建模与仿真进阶实验流程可能包括以下步骤:
- 导入机器人硬件设备的CAD模型:使用CAD软件(如SolidWorks、AutoCAD等)导入机器人的硬件设备的CAD模型,并导出为STL文件格式。
- 创建机器人仿真环境:在Gazebo中创建一个新的仿真环境,并设置仿真器的物理引擎、时间步长、传感器等参数。
- 导入机器人模型:将机器人的CAD模型导入到Gazebo中,并设置机器人的几何结构、运动学模型、动力学模型等。
- 编写机器人控制程序:使用ROS编写机器人的控制程序,包括机器人的运动控制、传感器数据采集等。
- 模拟传感器数据:在Gazebo中模拟机器人的传感器数据,如激光雷达、摄像头、GPS等,并将传感器数据输出到ROS中。
- 可视化机器状态和传感器数据:使用ROS的可视化工具,如rqt_plot、rqt_image等,将机器人的状态和传感器数据可视化。
- 调试和优化:根据实验结果进行调试和优化,包括机器人的控制策略、传感器数据的处理等。
- 实验评估:对实验结果进行评估,包括机器人的运动精度、传感器数据的准确性等。
以上是蓝桥云课ROS机器人实验报告-04三维建模与仿真进阶实验流程的一个大致框架,具体步骤和流程可能会根据实验的目的和实际情况进行调整。
蓝桥云课ROS机器人实验报告-04三维建模与仿真核心要点总结如下:
- ROS仿真环境介绍:介绍ROS仿真环境的概念、优点、常用工具和流程。
- Gazebo介绍:介绍Gazebo仿真器的概念、特点、使用方法和优势,以及与ROS的集成。
- 创建机器人模型:介绍如何使用Gazebo和ROS创建机器人的仿真模型,包括机器人的几何结构、运动学模型、动力学模型等。
- 机器人控制:介绍如何使用ROS控制机器人在仿真环境中运动和感知,以及与仿真模型进行交互。
- 传感器模拟:介绍如何使用Gazebo和ROS模拟机器人的传感器,如激光雷达、摄像头、GPS等,并采集传感器的数据。
- 数据可视化:介绍如何使用ROS的可视化工具,如rqt_plot、rqt_image等,将机器人的状态和传感器数据可视化。
以上是蓝桥云课ROS机器人实验报告-04三维建模与仿真核心要点的总结,掌握这些内容可以帮助学生在ROS中创建机器人仿真模型,并进行控制和传感器数据的模拟和可视化。