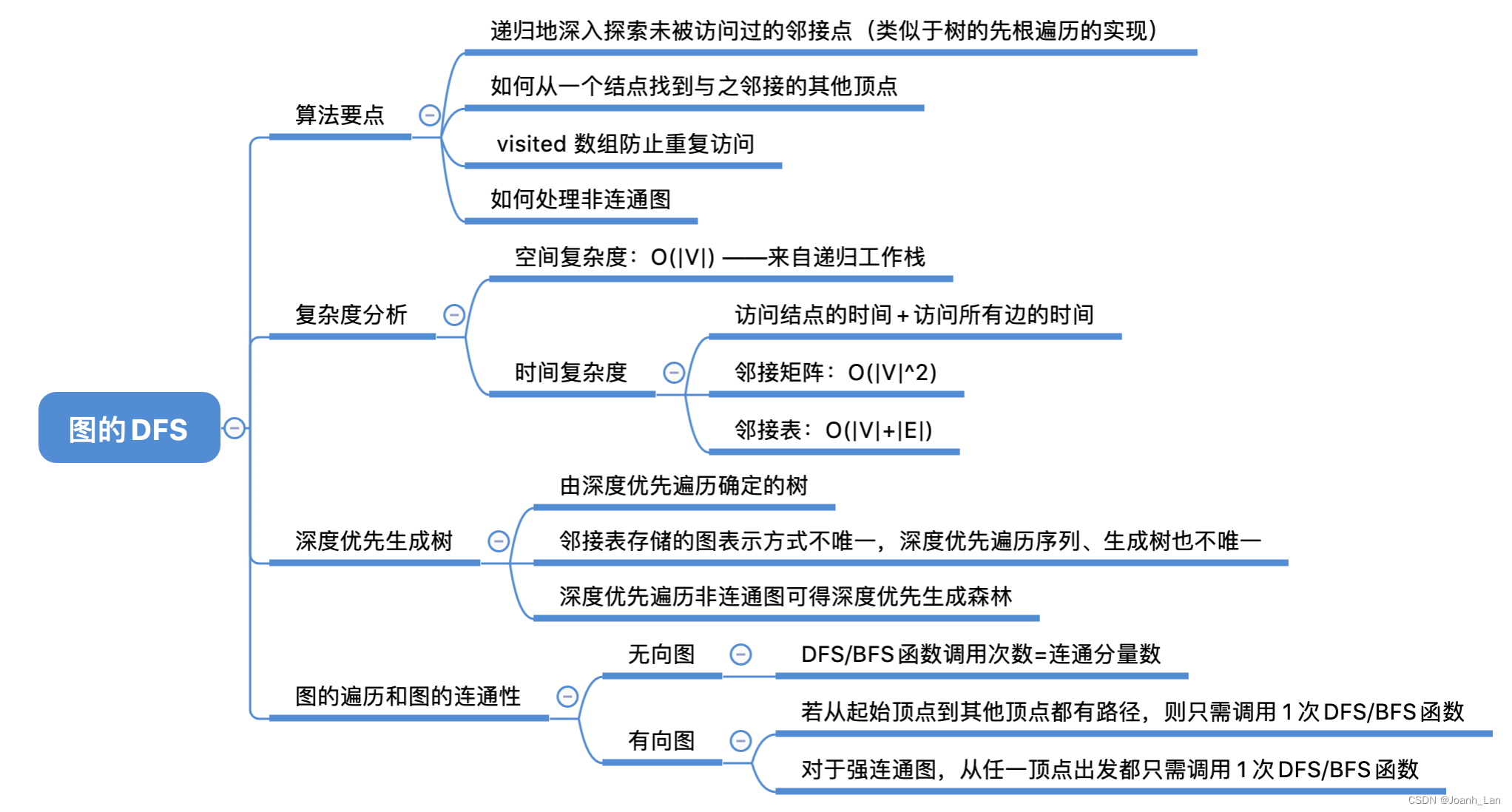
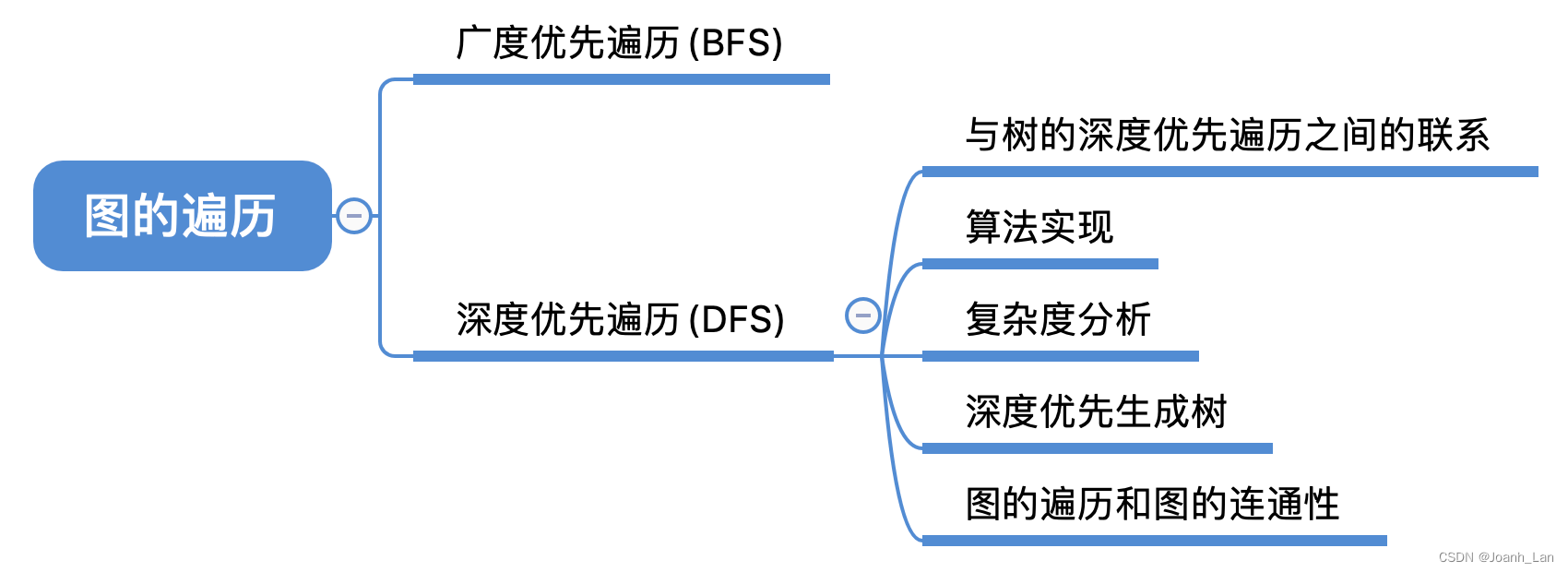
数据结构–图的遍历 DFS
树的深度优先遍历

//树的先根遍历
void PreOrder(TreeNode *R)
{
if(R != NULL)
{
visit(R); //访问根节点
while(R还有下一个子树T)
PreOrder(T);//先根遍历下一棵子树
}
}
图的深度优先遍历


bool visited [MAX_VERTEX_NUM]; //访问标记数组
void DFS(Graph G, int v) //从顶点v出发,深度优先遍历图
{
visit(v);//访问顶点
visited[v] = TRUE; //设已访问标记
{
for(w = FirstNeighbor(G, v); w >= 0; w = NextNeighor(G, v, w))
if(!visited[w]) //w为u的尚未访问的邻接顶点
DFS(G, w);
}
}
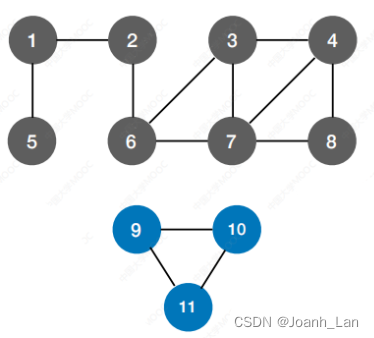
如果是⾮连通图,则⽆法遍历完所有结点
bool visited[MAX_VERTEX_NUM]; //访问标记数组
void DFSTraverse(Graph G)//对图G进行深度优先遍历
{
for(v = 0; v < G.vexnum; ++v)
visited[v] = FALSE;//初始化已访问标记数据
for(v = 0; v < G.vexnum; ++v)
if(!visited[v])DFS(G, v);//本代码中是从v=0开始遍历
}
void DFS(Graph G, int v) //从顶点v出发,深度优先遍历图G
{
visit(v);//访问顶点v
visited[v] = TRUE; //设已访问标记
for(w = FirstNeighbor(G, v); w >= 0; w = NextNeighor(G, v, w))
if(!visited[w]) //w为u的尚未访问的邻接顶点
DFS(G,w);
}
复杂度分析

空间复杂度:来⾃函数调⽤栈,最坏情况,递归深度为 O ( ∣ V ∣ ) \color{red}空间复杂度:来⾃函数调⽤栈,最坏情况,递归深度为O(|V|) 空间复杂度:来⾃函数调⽤栈,最坏情况,递归深度为O(∣V∣)

空间复杂度:最好情况, O ( 1 ) \color{purple}空间复杂度:最好情况,O(1) 空间复杂度:最好情况,O(1)

时间复杂度=访问各结点所需时间+探索各条边所需时间
邻接矩阵
\color{red}邻接矩阵
邻接矩阵存储的图:
访问 |V| 个顶点需要O(|V|)的时间
查找每个顶点的邻接点都需要O(|V|)的时间,⽽总共有|V|个顶点
时间复杂度=
O
(
∣
V
∣
2
)
\color{red}O(|V|^2)
O(∣V∣2)
邻接表
\color{red}邻接表
邻接表存储的图:
访问 |V| 个顶点需要O(|V|)的时间
查找各个顶点的邻接点共需要O(|E|)的时间,
时间复杂度=
O
(
∣
V
∣
+
∣
E
∣
)
\color{red}O(|V|+|E|)
O(∣V∣+∣E∣)
注:
同⼀个图的
邻接矩阵
\color{red}邻接矩阵
邻接矩阵表示⽅式
唯⼀
\color{red}唯⼀
唯⼀,因此
深度优先遍历序列唯⼀
\color{red}深度优先遍历序列唯⼀
深度优先遍历序列唯⼀
同⼀个图
邻接表
\color{red}邻接表
邻接表表示⽅式
不唯⼀
\color{red}不唯⼀
不唯⼀,因此
深度优先遍历序列不唯⼀
\color{red}深度优先遍历序列不唯⼀
深度优先遍历序列不唯⼀
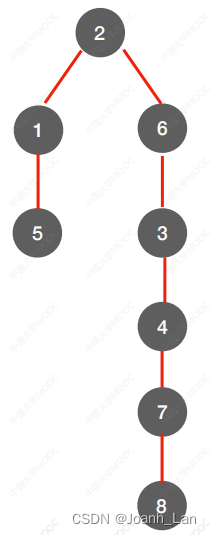
深度优先⽣成树

同⼀个图的邻接矩阵表示⽅式唯⼀,因此深度优先遍历序列唯⼀,深度优先⽣成树也唯⼀
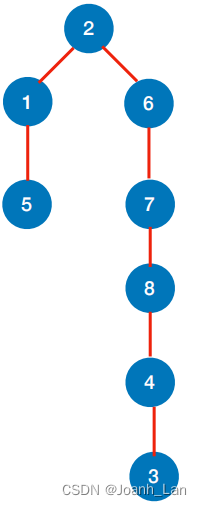
同⼀个图邻接表表示⽅式不唯⼀,因此深度优先遍历序列不唯⼀,深度优先⽣成树也不唯⼀
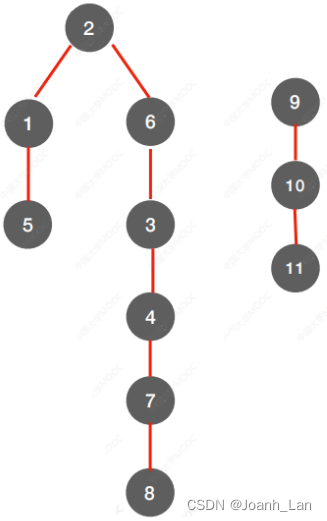
深度优先⽣成森林
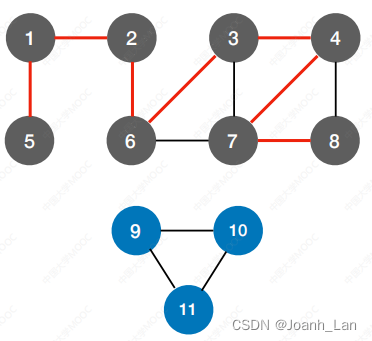
图的遍历与图的连通性

对
⽆向图
\color{red}⽆向图
⽆向图进⾏BFS/DFS遍历
调⽤BFS/DFS函数的次数=连通分量数
对于 连通图 \color{red}连通图 连通图,只需调⽤1次 BFS/DFS
对
有向图
\color{red}有向图
有向图进⾏BFS/DFS遍历
调⽤BFS/DFS函数的次数要具体问题具体分析
若起始顶点到其他各顶点都有路径,则只需调⽤1次
BFS/DFS 函数
对于 强连通图 \color{red}强连通图 强连通图,从任⼀结点出发都只需调⽤1次 BFS/DFS
知识回顾与重要考点