目录
1.强化学习和深度学习的区别
2. 强化学习思路
3.baseline
4.PPO
4.1on-policy和off-policy简单理解
4.2actotcritic
5.DQN(回归问题)
4.1公式
4.2Q表
参考文献
1.强化学习和深度学习的区别
强化学习和深度学习的区别:在深度学习中,像分类问题,模型做出决策之后,我们会有一个标签,告诉模型你做的对不对,是否需要改进,再决定是否更新网络。但强化学习,并不是一个监督学习,没有标签告诉模型你做的是否正确,只是说,你每走一步我告诉你你得多少分,最后通过·总分来反应一系列决策的好坏。
从应用上看:假设输入为一个老虎,深度学习只能告诉你,这是个老虎,你可以选择跑或不跑(分类),强化学习可以告诉你怎么跑(往哪一个方向,每一步该怎么走最优)。
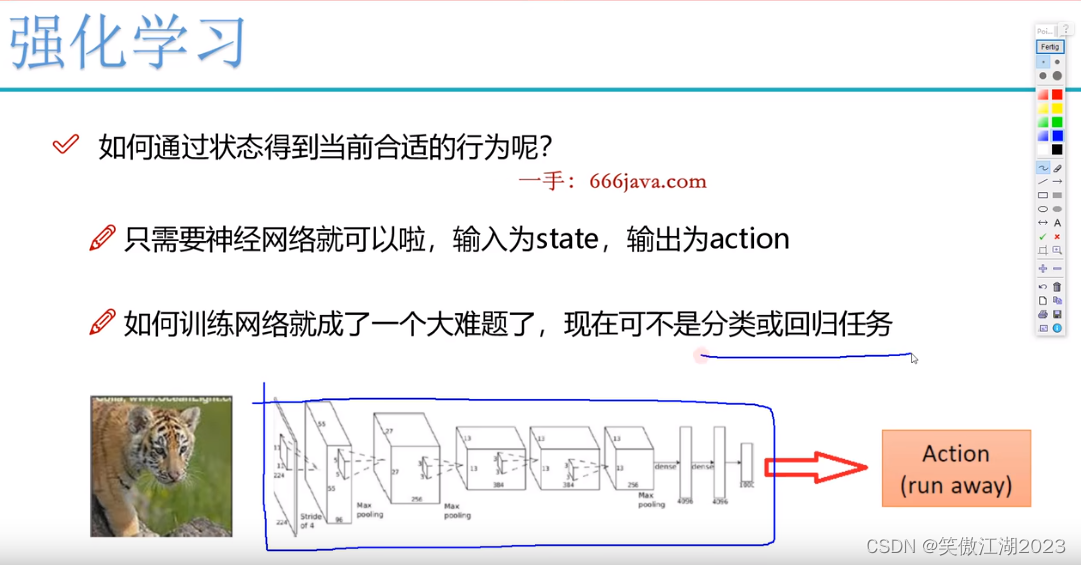
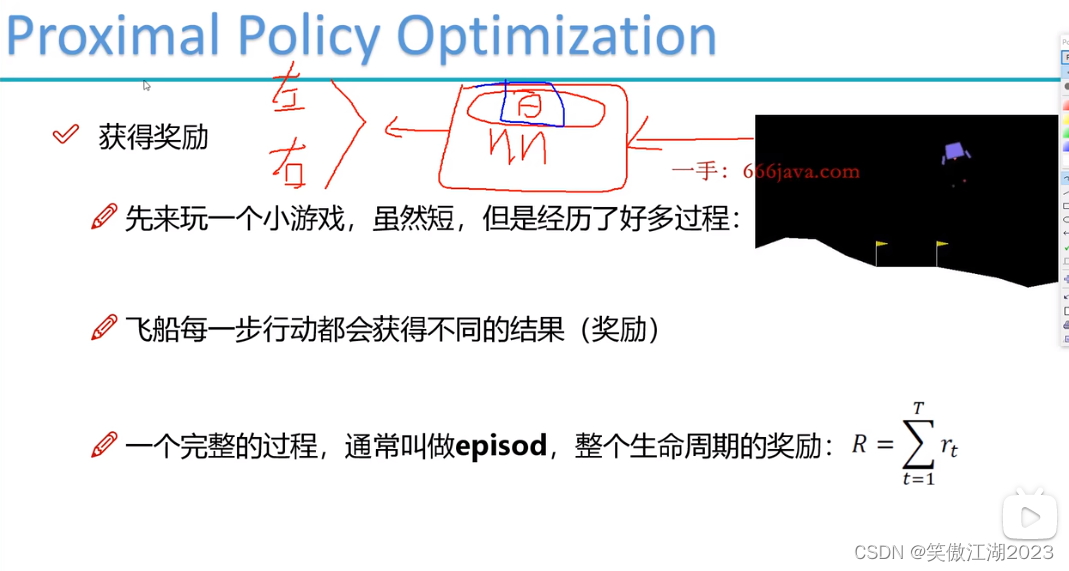
从下图进一步理解强化学习和深度学习的区别:下图游戏的目的是让小飞船平稳落地,假设我们用深度学习解决这个问题,我们发现将图像输入神经网络后,模型要输出左移还是右移的决策,这是一个二分类问题,但问题这个交互式任务,是没有标签的,在输出左移还是右移的决策之后,模型不知道和谁对比,证明左移对还是右移对。
2. 强化学习思路
强化学习思路:以上图小飞船为例,将小飞船状态state1作为输入,进入模型,得到action1(左移或右移)和这一步的R1(奖励或者惩罚),以及state2(做完action1的下一个状态)。再将state2作为输入,得到action2(左移或右移)和这一步的R2(奖励或者惩罚),以及state3(做完action2的下一个状态)。再将state3作为输入...。以次类推,指导满足停止条件(比方说走了1000步)。
理解强化学习模型:下图就是强化学习模型,可以参照前馈网络理解,就是网络的另一种表达方式或者说结构,R(奖励)是为了得到最优的模型
。
![]() 表示每一次训练周期所记录的数据。
表示每一次训练周期所记录的数据。
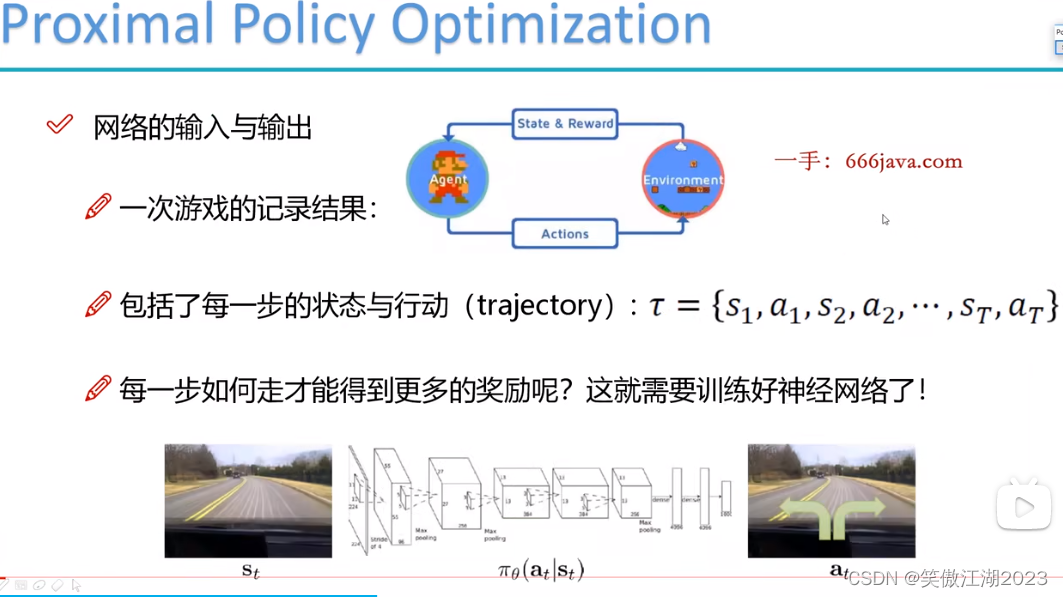
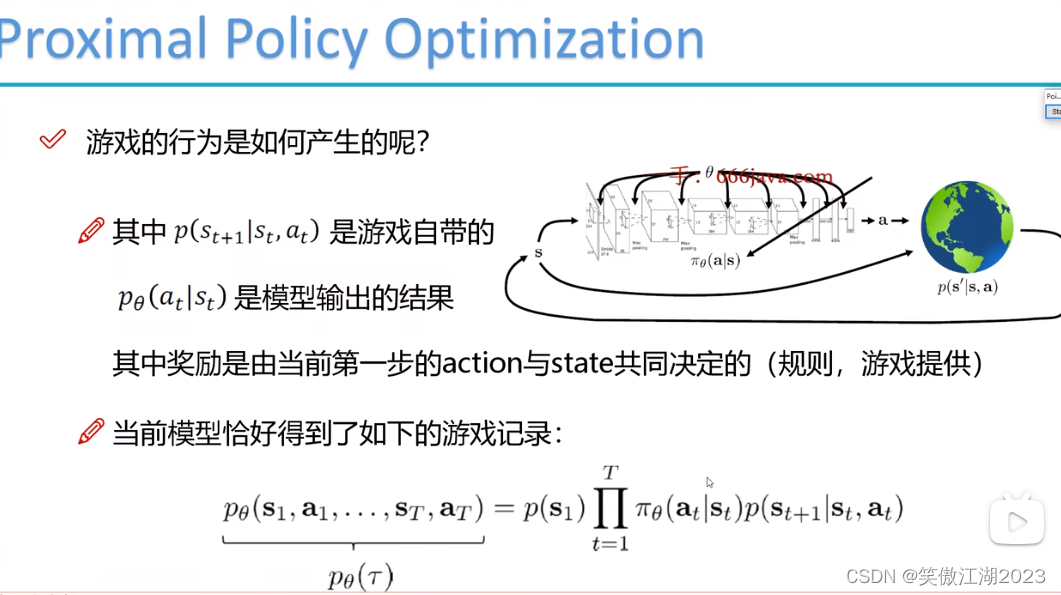
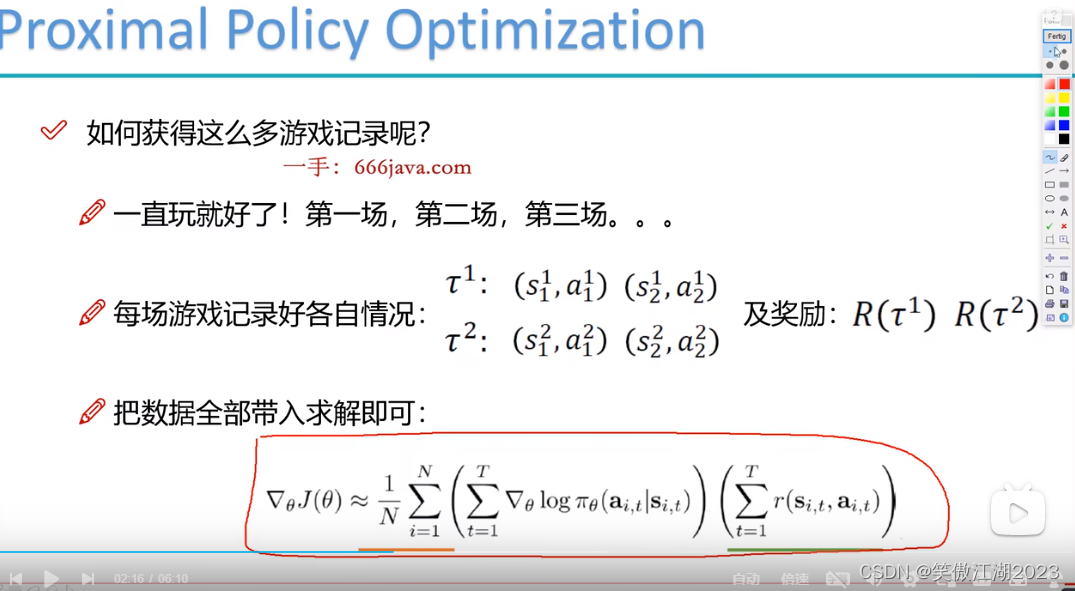
从游戏中理解一下模型中的数据:下图第一个p表示在状态为st时,有动作at得到下一个状态st+1,第二个p表示有状态st时得到下一个at的概率,而奖励R需要去设计,在模型中我们需要的数据s不需要我们设计,是交互后自然产生的,a是我们需要设计的,但设计之后a是固定的选择,不需要变化,但第二个p也就是选择哪一个动作的概率需要我们决定,这里需要一个概率转移函数,最后设计什么样的规则怎么给奖励的选择也是多样的,这里需要一个奖励函数。最后理解一下游戏记录下右侧的函数,意思是输入为s1时,每一个t所对应的动作,及这个动作所带来的对应的st+1,
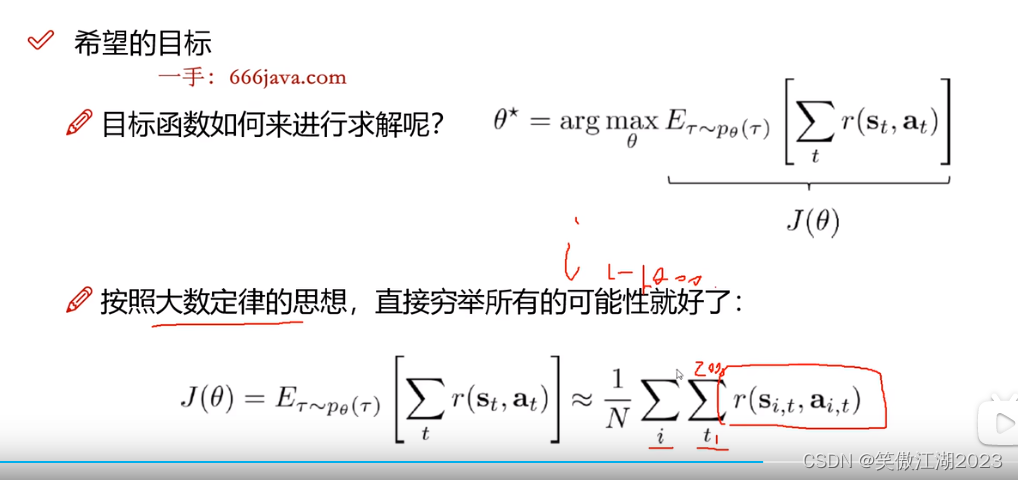
理解强化学习的目标函数:在强化学习中目标函数为奖励最大值的期望,θ为需要更新的权重,为什么不直接用最大值,而用最大值的期望呢,简单理解,这样做泛化效果更好,进一步可以理解为,同样的权重但是无法保证同样的action,更无法保证同样的奖励(这就类似于,一个人让他重走一遍人生,即便所有的权重(人生大小事的选择相同)他的结果可能不一样)。进一步我们看,最下面的公式的右侧来替代奖励期望的计算,其中N代表epoch(每一个epoch代表一轮游戏),i=1-epoch,t是一个epoch里面每一个动作,r代表奖励。这个公式意思是将所有训练数据动作奖励叠加求平均,来近似奖励期望。
最后我们得到强化学习梯度计算公式:将所有训练数据带入即可更新θ。
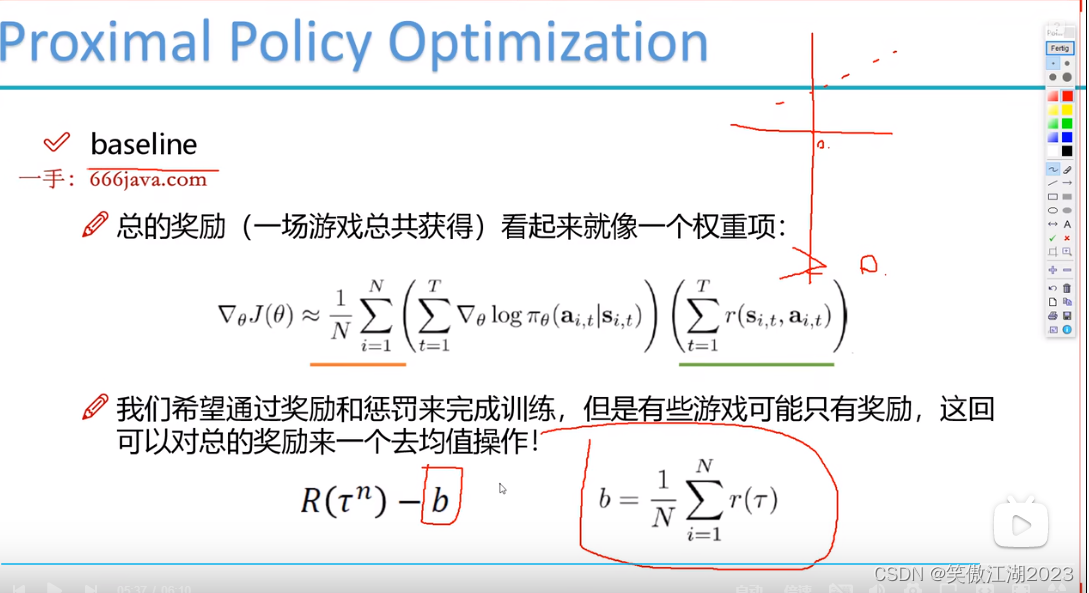
3.baseline
在设置奖励时会发现,有些情况下无法设置惩罚,所以采用了baseline概念,就是对所有奖励求平均值,再用所有奖励减去平局值,负的为惩罚,正的为奖励。
4.PPO
4.1on-policy和off-policy简单理解
简单理解为,像 小飞船落地,训练一千次,on-policy用这一千次的数据更新一次θ,而off-policy可以充分利用这一千次数据,进行多次更新。PPO算法就是基于off-policy。

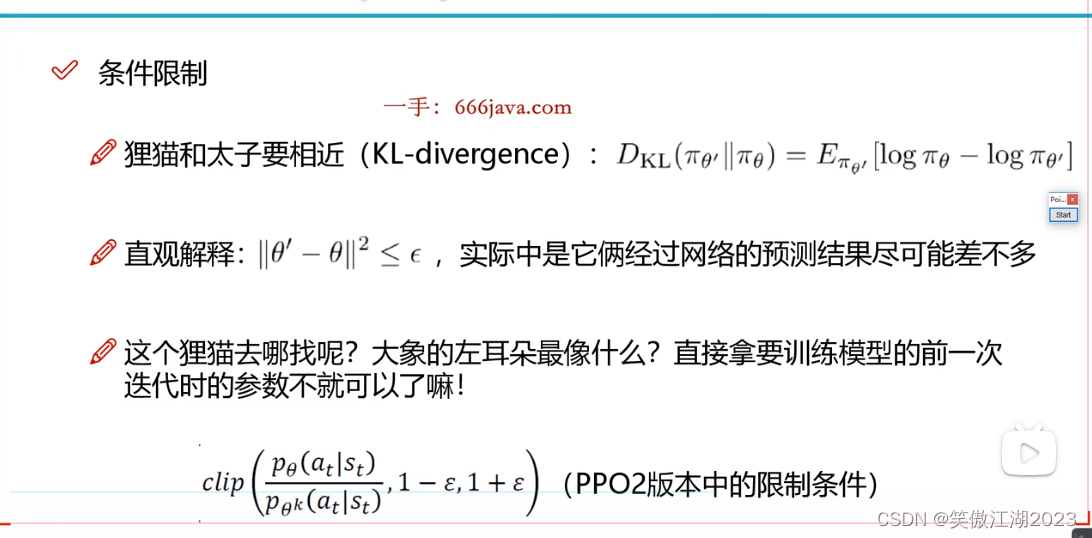
怎么找打工的:简单理解,当前为θ2,打工的就是θ1,当前为θ10打工的就是θ9,因为想要的打工的是和自己最相近的,要满足两者之差小于,所以认为前一个和自己最像,再用前一个的θ得到的数据,训练当前θ,就是说用θ1的训练数据训练θ2,θ2保存在θ中,再用θ2的训练数据训练θ3,再将θ3替代原θ2保存在θ中,一直跌倒到最后。
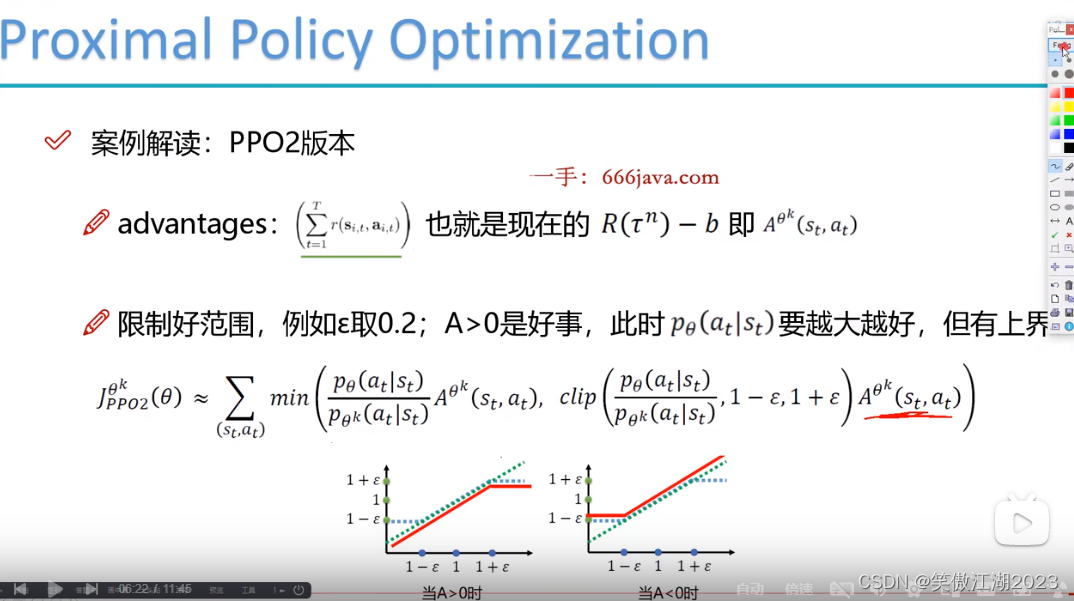
PPO2版本:如下图所示,限制条件做了改变,分子为当前θ,分母为打工θ。
4.2actotcritic
actor:当一个状态进来时确定选什么动作。分类任务,用神经网络解决。
critic:对actor选择的动作,评价好坏,输出的是一个value(值)。回归任务,用神经网络解决,全连接即可,不是卷积,上同。
进一步理解critic的作用:看下图b之前是作为奖励均值使用了,这里用critic的value替代,可以这样理解,当critic对actor选择的动作不满意时给他一个不好的评价,这个动作相对应的R-value可能会得到负值。
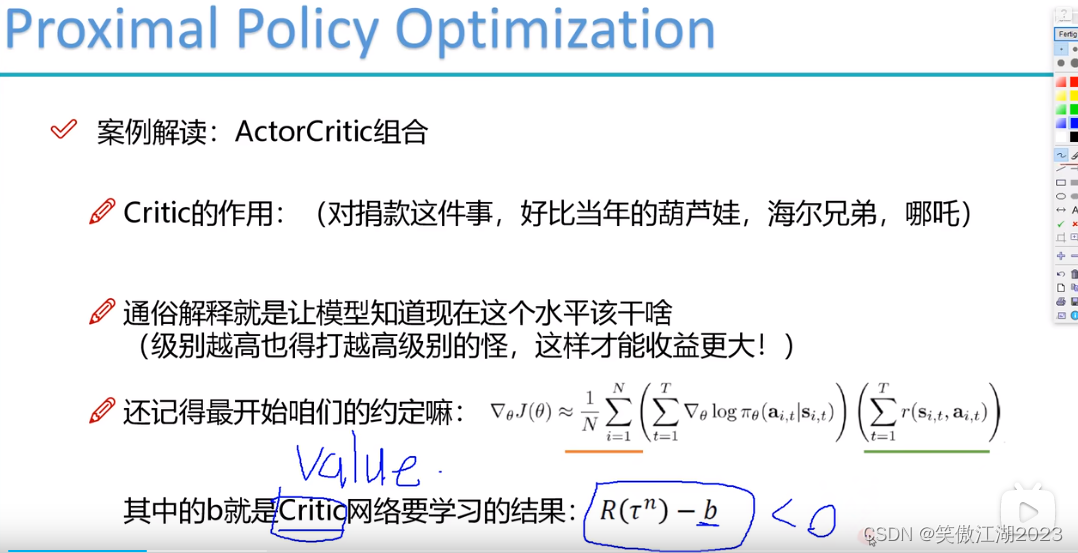
PPO2版本:R-b用A替代表示。下式求解时分两种情况,第一种A大于0时,希望分子越来越大,第二种A小于0时,希望分子越来越小。
5.DQN(回归问题)
4.1公式
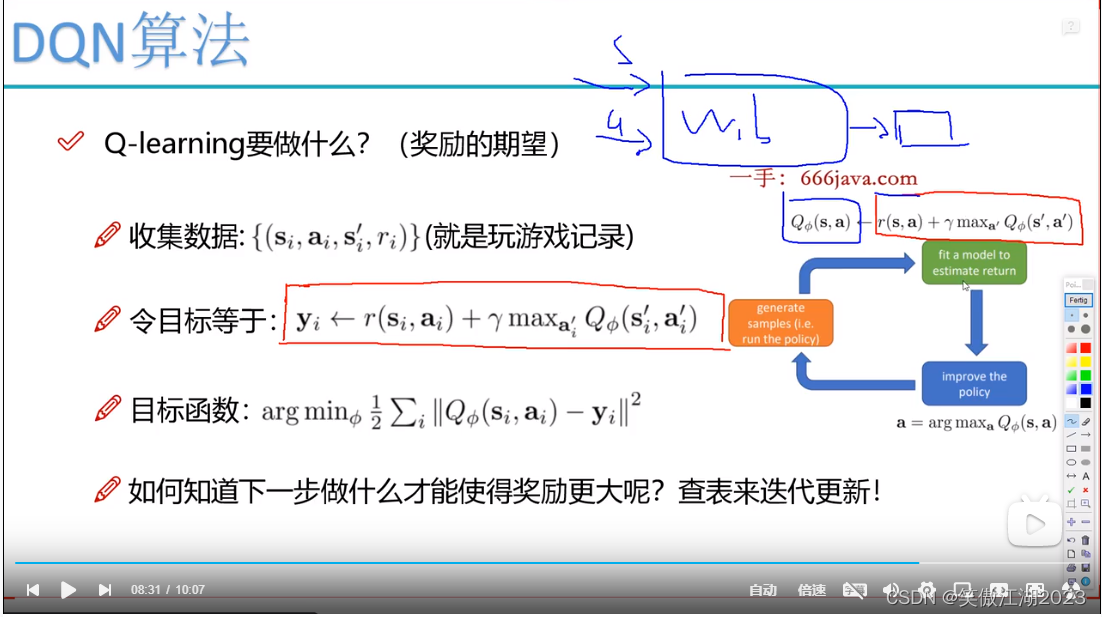
yi中r表示当前状态下,该动作的奖励,加上下一个状态下最好的动作(这半句需进一步理解)。Q可以理解为一个神经网络函数,输入是s和a。
蓝框的Q用神经网络表示,得到估计值,红框是真实值,可以理解为标签值,那么这就变成了回归任务,目的就是学习Q中的w和b。进一步得到目标函数。注意到max的Q也是一个网络。
4.2Q表
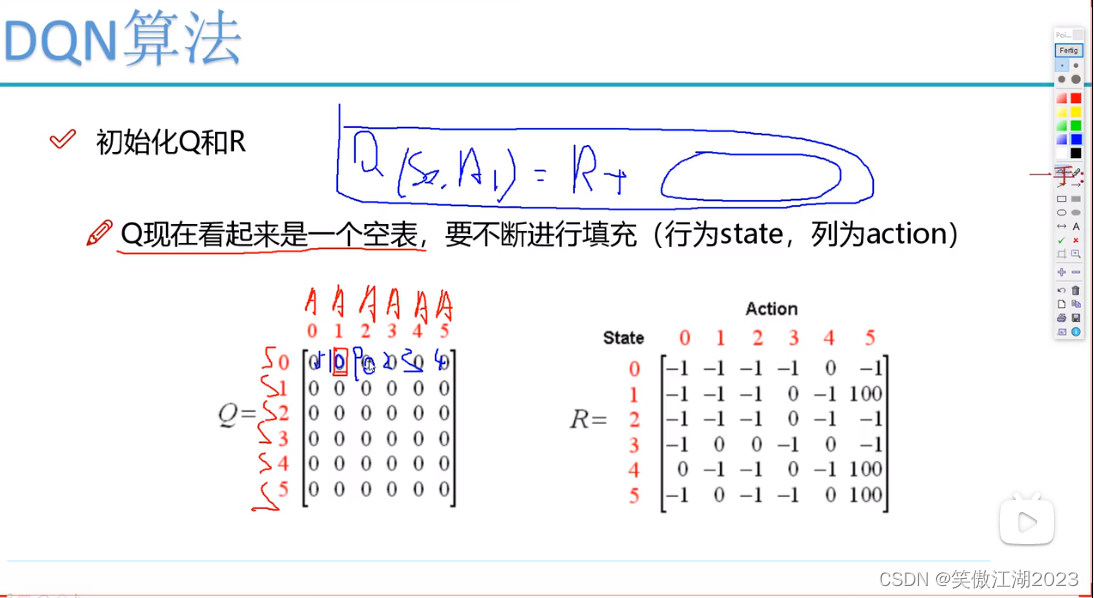
假设下列是一个已经学习过的Q表,当处在状态s0时,看相应的几个A(a),找到最大值,对应A(a)2,作为选择动作,然后进入s1状态,继续往下。注意Q和R不同。
蓝色框对应上面一手下面的公式,<-应该是=。注意这个R是设计好的奖励规则。
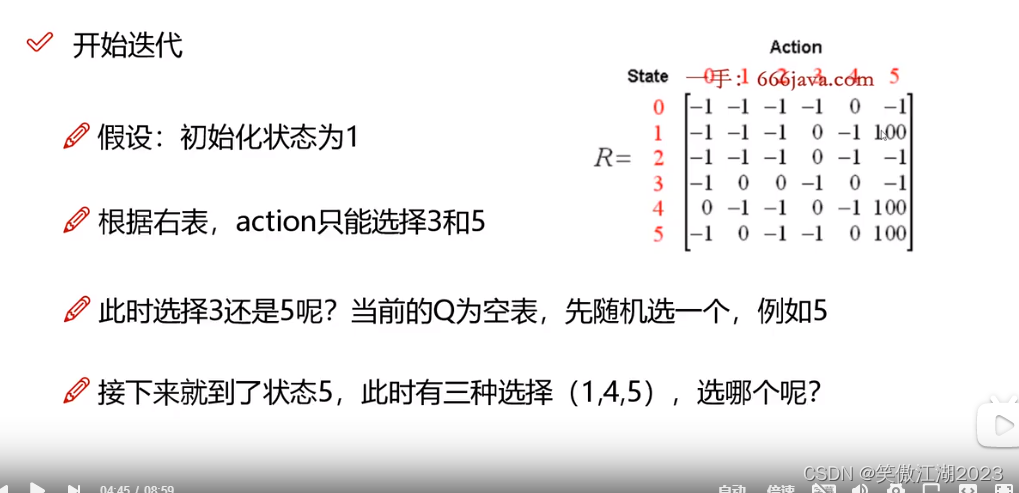
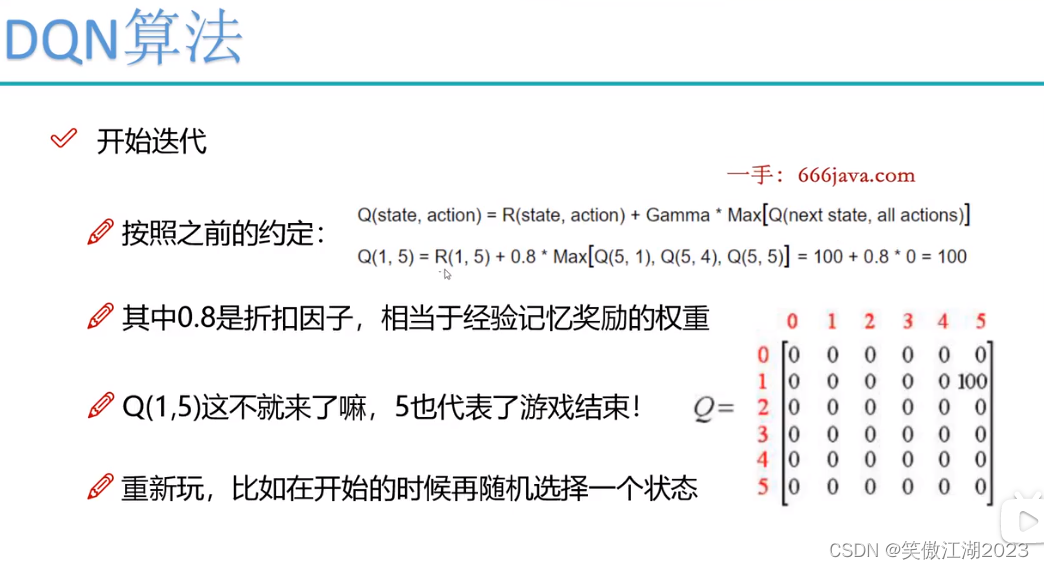
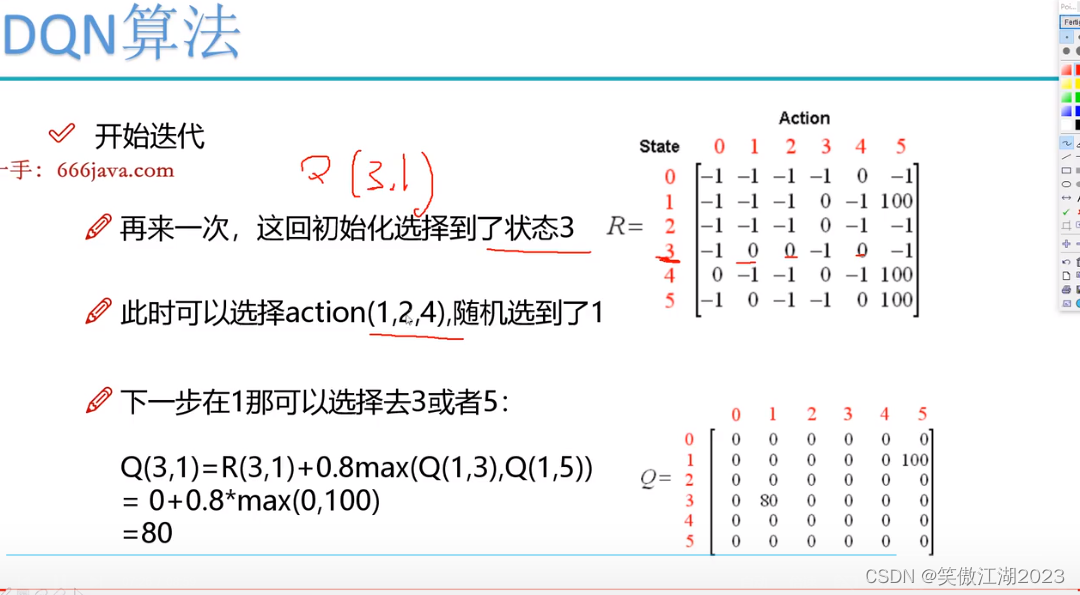
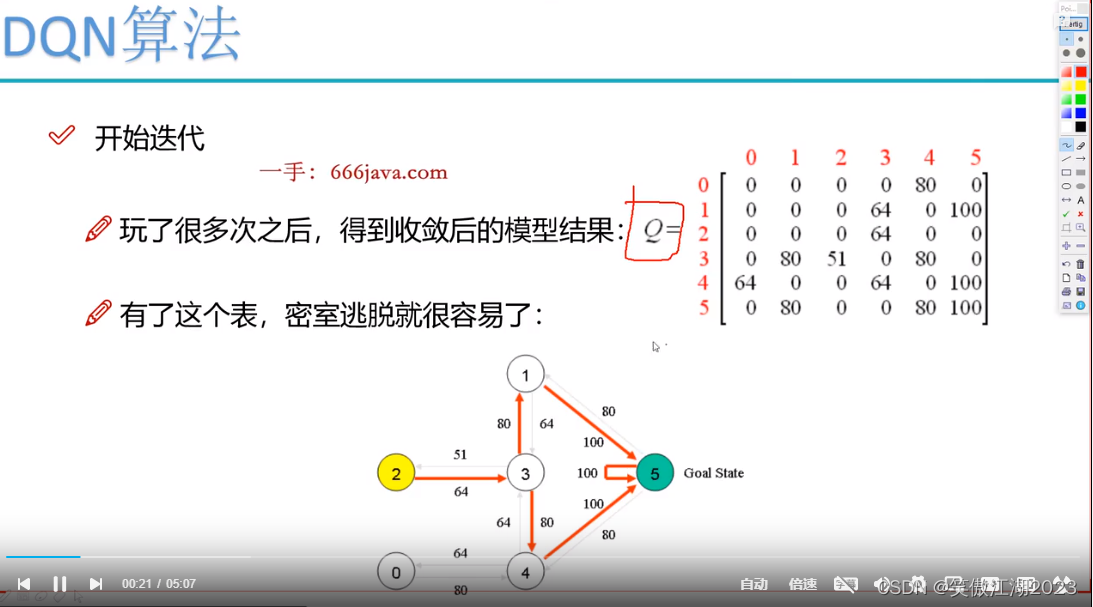
开始迭代:令上图Q全为0,R不变开始迭代,如下图所示,假设初始为s1,此时Q为0,按照R应该选择R(1,5),此时Q(1,5)=R(1,5)+0.8*Max[Q(5,1),Q(5,4),Q(5,5)]=100+0.8*0=100。注意到[Q(5,1),Q(5,4),Q(5,5)]中选最大值,那么为什么选他们,因为在R中1,4,5是可以走的选项。那么此时Q表中就有了第一个值,然后开始第二次更新,从s3开始,如下图所示,得到另一个Q值,以此类推,进行训练。最终得到图(2.2)的Q表,图中的导线图上的Q值可以理解为神经网络的权重。在实际中,需要穷举得到可用的Q表,但不现实,所以用神经网络替代Q表的效果。
参考文献
1.4-得到动作结果.mp4_哔哩哔哩_bilibili