文章目录
- 前言
- 一、相关文件
- 二、cubemx配置
- 三、代码
- 变量
- 初始化
- 主循环
- 总结
前言
文件
记录使用dmp库来读取mpu6050的角度。
这是参考文件
参考1–主要参考
github参考
参考2
参考三
一、相关文件
相关文件在这里下载(未填,不过可以在上面的git中下载)
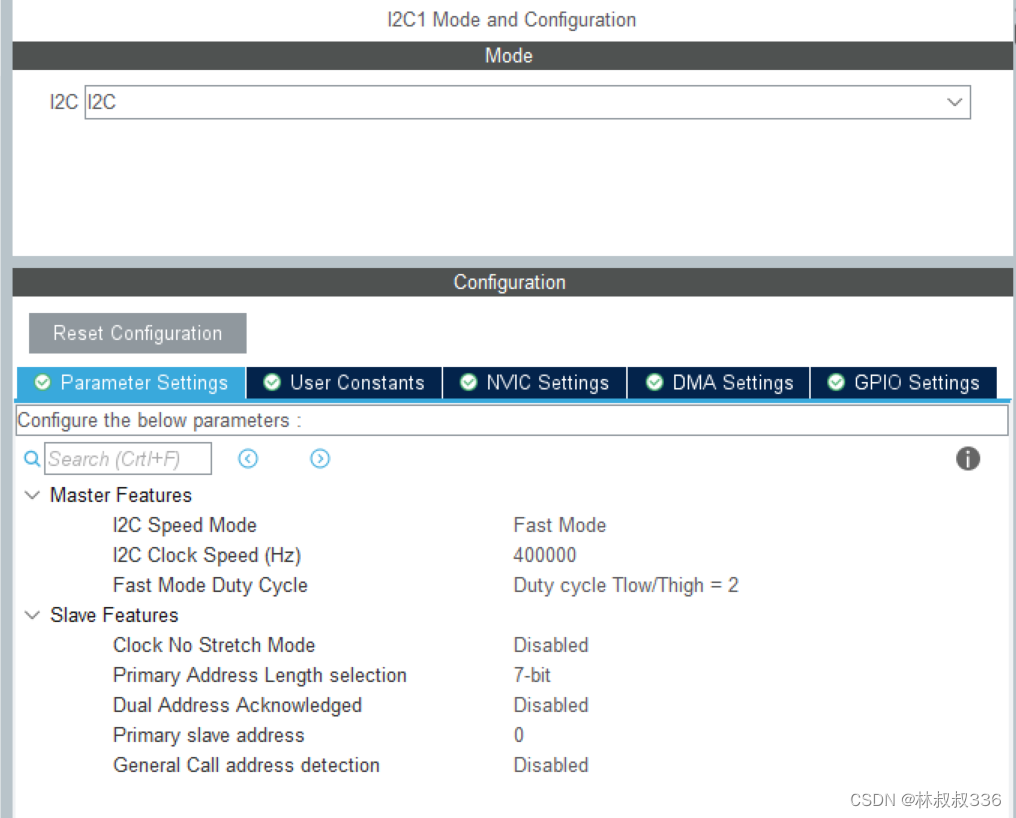
二、cubemx配置
三、代码
变量
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temp; //温度
初始化
while(MPU_Init()); //初始化MPU6050
while(mpu_dmp_init())
{
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
// delay_ms(200);
}
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
主循环
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature(); //得到温度值
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
}
总结
over