基础环境
- ubuntu及ROS安装,略;
- 安装完ROS以后,默认已经安装好了PCL和Eigen库;
安装Ceres
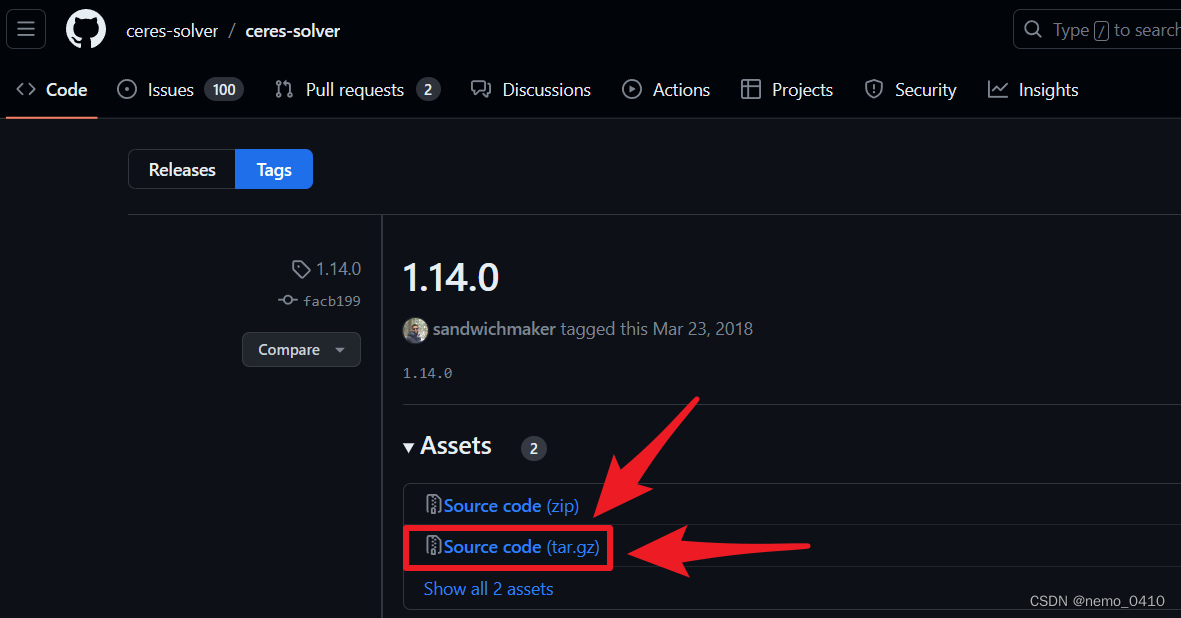
- 下载Ceres源文件:( Vmware没有网络,到下面的网址手动下载安装包 )
- https://github.com/ceres-solver/ceres-solver/releases/tag/1.14.0
sudo apt install libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libgtest-dev
- 在linux系统下,解压,cd到ceres-solver-1.14.0路径下,分别执行:
mkdir build
cd build
cmake ..
make
make test
sudo make install
配置 A-LOAM
- 同样没有网。。。手动下载 ALOAM 源代码
- 创建 aloam_ws/src/ 中粘贴并解压
- 运行以下命令:
cd ~/aloam_ws
catkin_make
- source
- 首先在根目录中找到.bashrc文件,打开以后,aloam_ws/devel/setup.bash 的路径,添加到最后一行。
- 然后更新bashrc内容:
source ~/.bashrc
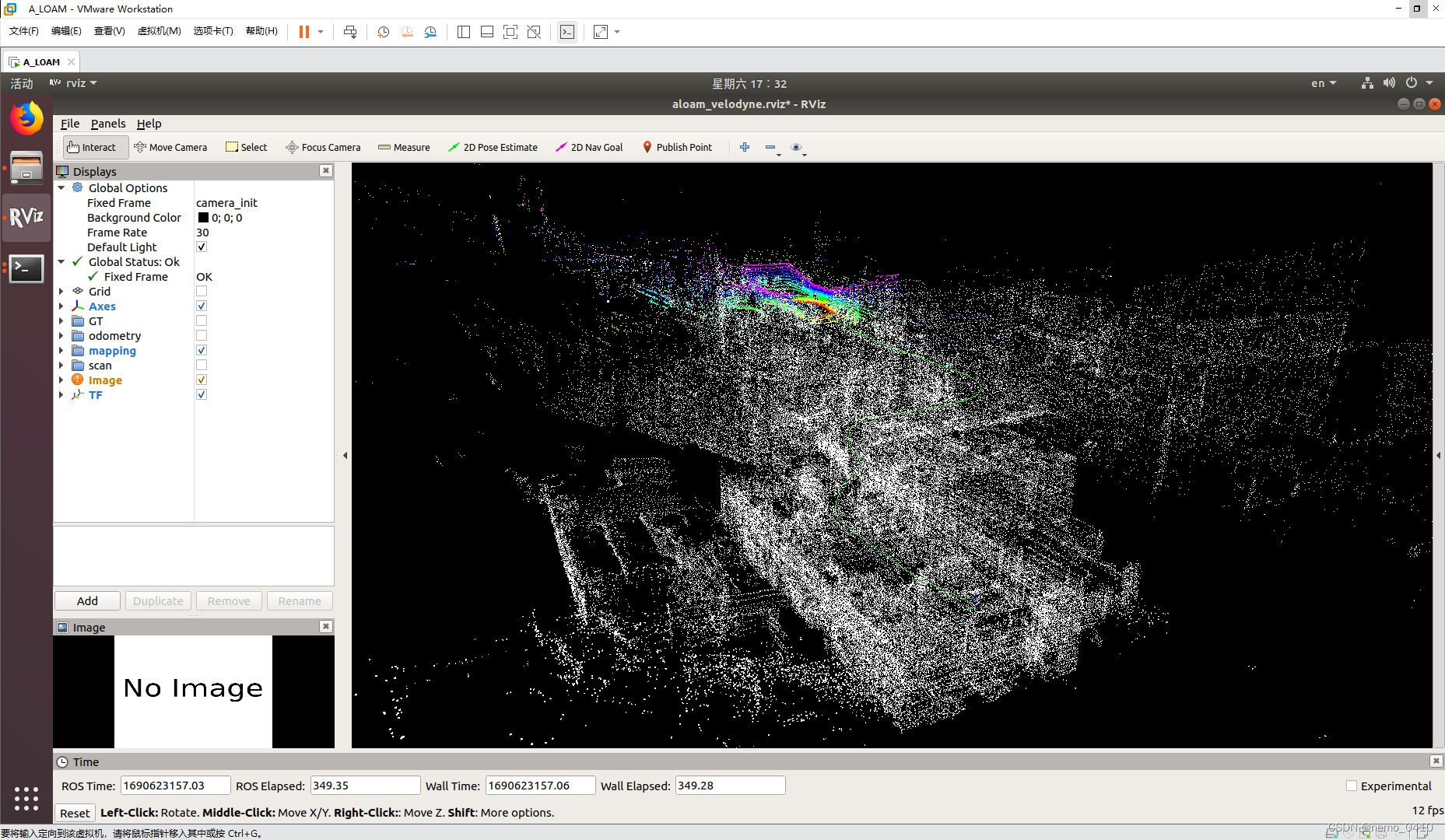
测试 ALOAM
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play nsh_indoor_outdoor.bag
https://drive.google.com/file/d/1s05tBQOLNEDDurlg48KiUWxCp-YqYyGH/view
坑
- 从win像虚拟机传导bag时,要传输压缩版本,到linux下面再解压缩,否则会fetal报错。



![P1535 [USACO08MAR] Cow Travelling S(dfs+剪枝 or 记忆化搜索)](https://img-blog.csdnimg.cn/a4db5aab80ee4a0fb939c524bb97912e.png)