飞行动力学-第15节-part2-松杆中性点 之 基础点摘要
- 1. 松杆中性点
- 2. 松浮角
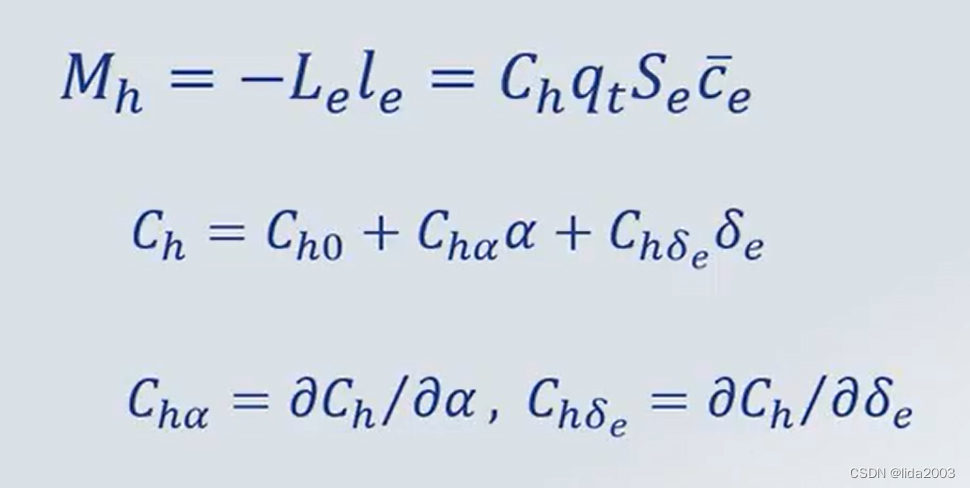
- 2. 杆力梯度
- 3. 参考资料
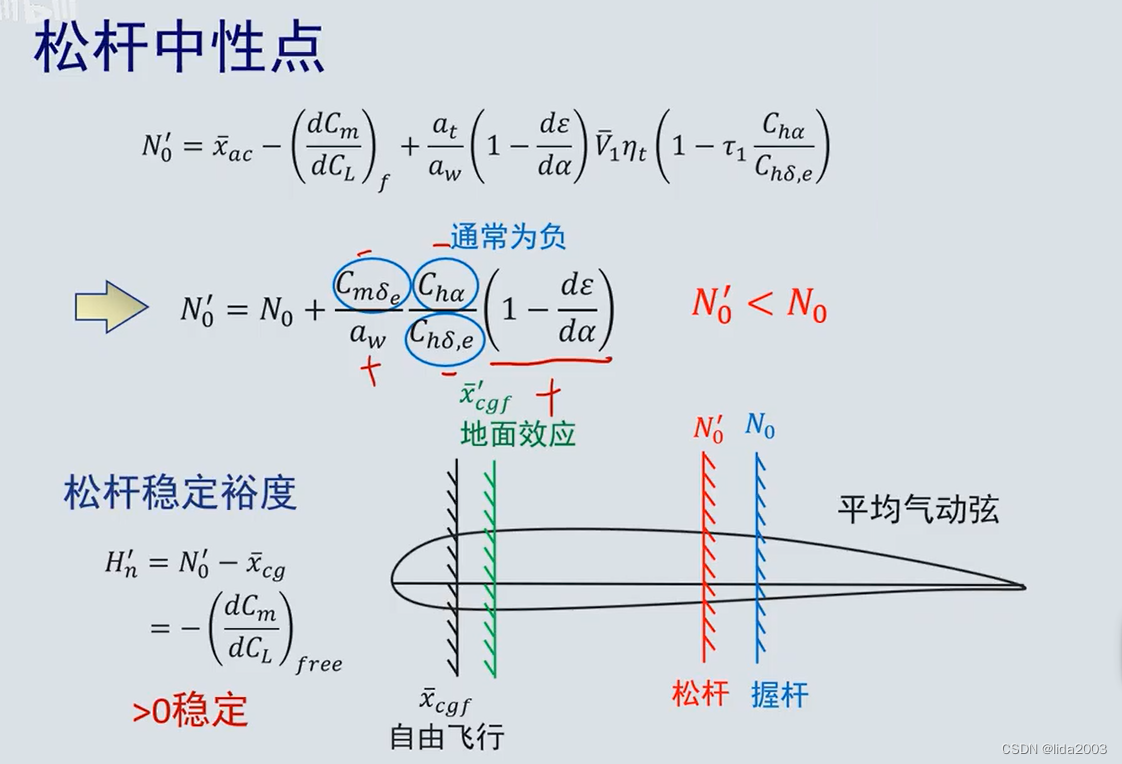
1. 松杆中性点
- stick fixed: N 0 N_0 N0,握杆,升降舵固定
- stick free: N 0 ′ N'_0 N0′,松杆,升降舵自由(在气动力作用下偏转直至铰链力矩为零)
2. 松浮角
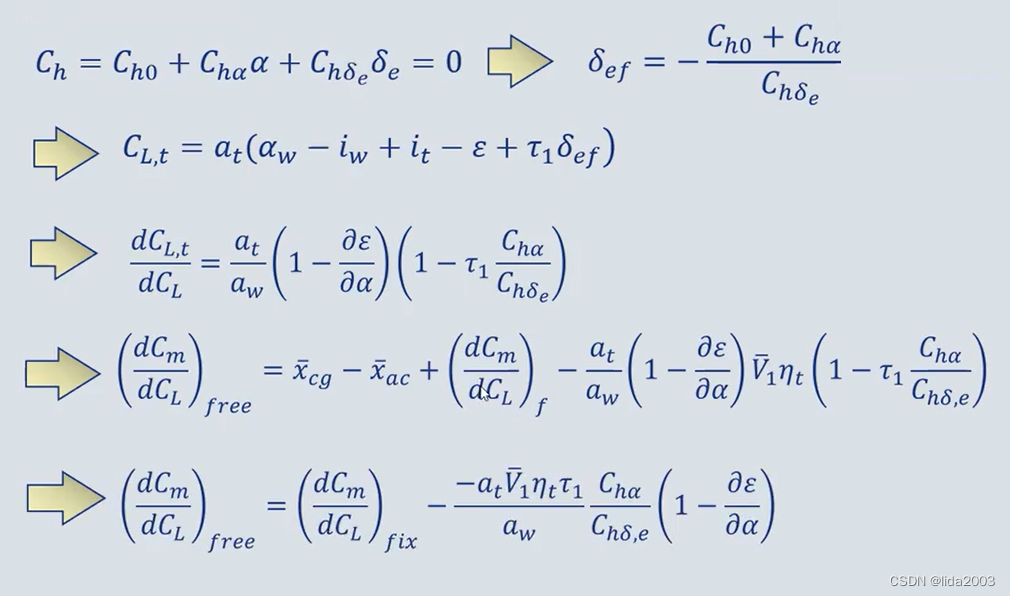 松杆静稳定性是低于握杆静稳定性的。
松杆静稳定性是低于握杆静稳定性的。
( d C m d C L ) f r e e > d C m d C L ) f i x e d (\frac {dC_m} {dC_L})_{free} > \frac {dC_m} {dC_L})_{fixed} (dCLdCm)free>dCLdCm)fixed
2. 杆力梯度
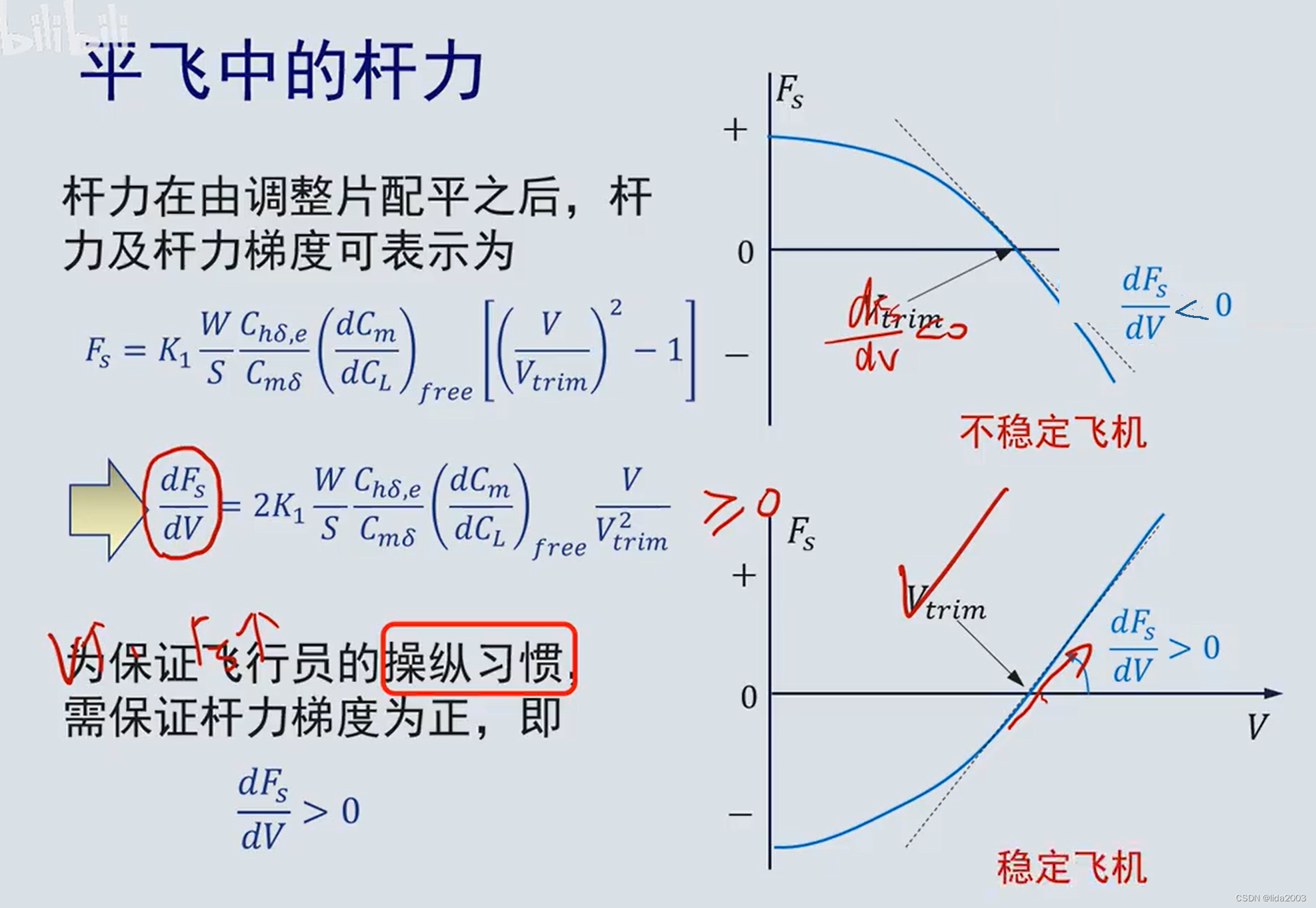
随着速度的增加,杆力增加是符合人体习惯的。
3. 参考资料
飞行动力学-第15节-part2-松杆中性点