Clion开发STM32之HAL库GPIO宏定义封装(最新版) Clion开发stm32之微妙延迟(采用nop指令实现) Clion开发STM32之日志模块(参考RT-Thread)
# ifndef F1XX_TEMPLATE_MODULE_DS18B20_H # define F1XX_TEMPLATE_MODULE_DS18B20_H # include "sys_core.h" typedef struct {
void ( * input_mode_set) ( void ) ;
void ( * out_mode_set) ( void ) ;
void ( * send_data) ( uint32_t status) ;
uint32_t ( * read_data) ( void ) ;
void ( * us_delay) ( uint32_t us) ;
} DS18B20_conf_t;
void DS18B20_conf_set ( DS18B20_conf_t * cnf) ;
bool DS18B20_Driver_Init ( void ) ;
void DS18B20_readId ( uint8_t * ds18b20_id) ;
float DS18B20_GetTemp_SkipRom ( void ) ;
float DS18B20_GetTemp_MatchRom ( const uint8_t * ds18b20_id) ;
# endif
# include "ds18b20/module-ds18b20.h" # define DBG_ENABLE # define DBG_SECTION_NAME "ds18b20" # define DBG_LEVEL DBG_LOG # include "sys_dbg.h" static DS18B20_conf_t * conf_ptr = NULL ;
# define DS18B20_DQ_0 conf_ptr-> send_data ( 0 ) # define DS18B20_DQ_1 conf_ptr-> send_data ( 1 ) static void DS18B20_WriteByte ( uint8_t dat) ;
static uint8_t DS18B20_ReadByte ( void ) ;
static bool DS18B20_Presence ( void ) ;
void DS18B20_conf_set ( DS18B20_conf_t * cnf) {
conf_ptr = cnf;
}
static void DS18B20_Rst ( void ) {
conf_ptr-> out_mode_set ( ) ;
DS18B20_DQ_0;
conf_ptr-> us_delay ( 750 ) ;
DS18B20_DQ_1;
conf_ptr-> us_delay ( 15 ) ;
}
bool DS18B20_Driver_Init ( void ) {
if ( conf_ptr == NULL ) return false;
conf_ptr-> out_mode_set ( ) ;
DS18B20_DQ_1;
DS18B20_Rst ( ) ;
return DS18B20_Presence ( ) ;
}
void DS18B20_readId ( uint8_t * ds18b20_id) {
if ( conf_ptr == NULL ) return ;
uint8_t uc;
DS18B20_WriteByte ( 0x33 ) ;
for ( uc = 0 ; uc < 8 ; uc++ )
ds18b20_id[ uc] = DS18B20_ReadByte ( ) ;
}
float DS18B20_GetTemp_SkipRom ( void ) {
uint8_t tpmsb = 0 , tplsb = 0 ;
short s_tem = 0 ;
float f_tem = 0 ;
DS18B20_Rst ( ) ;
DS18B20_Presence ( ) ;
DS18B20_WriteByte ( 0XCC ) ;
DS18B20_WriteByte ( 0X44 ) ;
DS18B20_Rst ( ) ;
DS18B20_Presence ( ) ;
DS18B20_WriteByte ( 0XCC ) ;
DS18B20_WriteByte ( 0XBE ) ;
tplsb = DS18B20_ReadByte ( ) ;
tpmsb = DS18B20_ReadByte ( ) ;
s_tem = tpmsb << 8 ;
s_tem = s_tem | tplsb;
if ( s_tem < 0 )
f_tem = ( ~ s_tem + 1 ) * 0.0625 ;
else
f_tem = s_tem * 0.0625 ;
return f_tem;
}
float DS18B20_GetTemp_MatchRom ( const uint8_t * ds18b20_id) {
uint8_t tpmsb, tplsb, i;
short s_tem;
float f_tem;
DS18B20_Rst ( ) ;
DS18B20_Presence ( ) ;
DS18B20_WriteByte ( 0X55 ) ;
DS18B20_Rst ( ) ;
DS18B20_Presence ( ) ;
DS18B20_WriteByte ( 0X55 ) ;
for ( i = 0 ; i < 8 ; i++ )
DS18B20_WriteByte ( ds18b20_id[ i] ) ;
DS18B20_WriteByte ( 0X44 ) ;
DS18B20_Rst ( ) ;
DS18B20_Presence ( ) ;
DS18B20_WriteByte ( 0X55 ) ;
for ( i = 0 ; i < 8 ; i++ )
DS18B20_WriteByte ( ds18b20_id[ i] ) ;
DS18B20_WriteByte ( 0XBE ) ;
tplsb = DS18B20_ReadByte ( ) ;
tpmsb = DS18B20_ReadByte ( ) ;
s_tem = tpmsb << 8 ;
s_tem = s_tem | tplsb;
if ( s_tem < 0 )
f_tem = ( ~ s_tem + 1 ) * 0.0625 ;
else
f_tem = s_tem * 0.0625 ;
return f_tem;
}
static void DS18B20_WriteByte ( uint8_t dat) {
uint8_t i, testb;
conf_ptr-> out_mode_set ( ) ;
for ( i = 0 ; i < 8 ; i++ ) {
testb = dat & 0x01 ;
dat = dat >> 1 ;
if ( testb) {
DS18B20_DQ_0;
conf_ptr-> us_delay ( 8 ) ;
DS18B20_DQ_1;
conf_ptr-> us_delay ( 58 ) ;
} else {
DS18B20_DQ_0;
conf_ptr-> us_delay ( 70 ) ;
DS18B20_DQ_1;
conf_ptr-> us_delay ( 2 ) ;
}
}
}
static uint8_t DS18B20_ReadBit ( void ) {
uint8_t dat;
conf_ptr-> out_mode_set ( ) ;
DS18B20_DQ_0;
conf_ptr-> us_delay ( 10 ) ;
conf_ptr-> input_mode_set ( ) ;
if ( conf_ptr-> read_data ( ) == 1 )
dat = 1 ;
else
dat = 0 ;
conf_ptr-> us_delay ( 45 ) ;
return dat;
}
static uint8_t DS18B20_ReadByte ( void ) {
uint8_t i, j, dat = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
j = DS18B20_ReadBit ( ) ;
dat = ( dat) | ( j << i) ;
}
return dat;
}
static bool DS18B20_Presence ( void ) {
uint8_t pulse_time = 0 ;
conf_ptr-> input_mode_set ( ) ;
while ( conf_ptr-> read_data ( ) && pulse_time < 100 ) {
pulse_time++ ;
conf_ptr-> us_delay ( 1 ) ;
}
if ( pulse_time >= 100 )
return 1 ;
else
pulse_time = 0 ;
while ( ! conf_ptr-> read_data ( ) && pulse_time < 240 ) {
pulse_time++ ;
conf_ptr-> us_delay ( 1 ) ;
}
if ( pulse_time >= 240 )
return false;
else
return true;
}
# include "app_conf.h" # define APP_CONF_ENABLE_DS18B20 ( 1 ) # if APP_CONF_ENABLE_DS18B20 # include "ds18b20/module-ds18b20.h" # define DBG_ENABLE # define DBG_SECTION_NAME "DS18B20" # define DBG_LEVEL DBG_LOG # include "sys_dbg.h" static DS18B20_conf_t ds18b20_conf;
static stm_pin_define_t * ds18b20_pin_ptr = NULL ;
static void out_mode_set ( void ) { stm32_pin_define_mode_set ( ds18b20_pin_ptr, pin_mode_output) ; }
static void input_mode_set ( void ) { stm32_pin_define_mode_set ( ds18b20_pin_ptr, pin_mode_input) ; }
static void send_data ( uint32_t status) { stm32_pin_define_set ( ds18b20_pin_ptr, status) ; }
static uint32_t read_data ( void ) { return stm32_pin_define_read ( ds18b20_pin_ptr) ; }
static void DS18B20_pre_init ( ) {
ds18b20_pin_ptr = stm_get_pin ( PE6) ;
ds18b20_conf. us_delay = bsp_us_delay_nop;
ds18b20_conf. out_mode_set = out_mode_set;
ds18b20_conf. input_mode_set = input_mode_set;
ds18b20_conf. send_data = send_data;
ds18b20_conf. read_data = read_data;
DS18B20_conf_set ( & ds18b20_conf) ;
}
sys_pre_init_export ( DS18B20, DS18B20_pre_init) ;
static void DS18B20_init ( ) {
while ( ! DS18B20_Driver_Init ( ) ) {
} ;
LOG_D ( "DS18B20_Driver_Init ok" ) ;
}
sys_init_export ( DS18B20, DS18B20_init) ;
static void DS18B20_after_init ( ) {
uint8_t uc, ucDs18b20Id[ 8 ] ;
DS18B20_readId ( ucDs18b20Id) ;
os_ps ( "DS18B20_readId:" ) ;
for ( int i = 0 ; i < 8 ; ++ i) {
os_ps ( "%X" , ucDs18b20Id[ i] ) ;
}
os_ps ( "\r\n" ) ;
while ( true) {
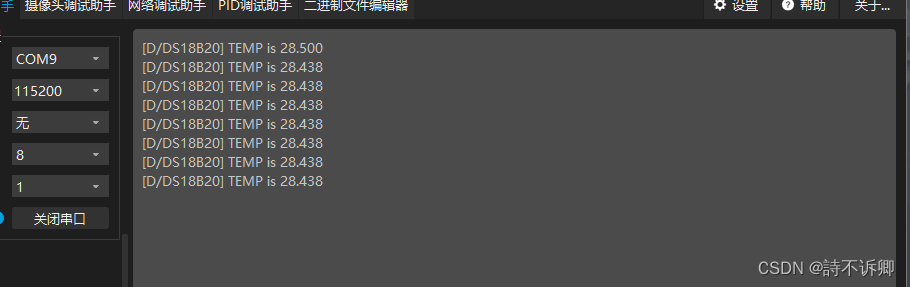
float temp = DS18B20_GetTemp_MatchRom ( ucDs18b20Id) ;
LOG_D ( "TEMP is %0.3f" , temp) ;
HAL_Delay ( 1000 ) ;
}
}
sys_after_init_export ( DS18B20, DS18B20_after_init) ;
# endif
![[PAT甲级] 1001 A+B Format [Python3]](https://img-blog.csdnimg.cn/913358b4449540378b8f2c4e9a31a062.png)






![[AWD靶场搭建]](https://s2.loli.net/2023/07/27/7EYnfT6N5J9rLBk.png)