一 部署colab环境
部署colab参考网站
相关文件:提取码:o2gn
在google drive中部署以上涉及的相关文件夹

二 对这个项目的解释
这个项目主要是对5类花的图像进行分类
采用迁移学习的方法,迁移学习resnet网络,利用原来的权重作为预训练数据,只训练最后的全连接层的权重参数
三 对代码的详细解释
import os
import matplotlib.pyplot as plt
%matplotlib inline
import numpy as np
import torch
from torch import nn
import torch.optim as optim
import torchvision
#pip install torchvision
from torchvision import transforms, models, datasets
#https://pytorch.org/docs/stable/torchvision/index.html
import imageio
import time
import warnings
import random
import sys
import copy
import json
from PIL import Image
# !pip install imageio
data_dir = './flower_data'
train_dir = data_dir + '/train'
valid_dir = data_dir + '/val'
print(os.getcwd())
print(train_dir)
/content
./flower_data/train
data_transforms = {
'train': transforms.Compose([transforms.RandomRotation(45),#随机旋转,-45到45度之间随机选
transforms.CenterCrop(224),#从中心开始裁剪
transforms.RandomHorizontalFlip(p=0.5),#随机水平翻转 选择一个概率概率
transforms.RandomVerticalFlip(p=0.5),#随机垂直翻转
transforms.ColorJitter(brightness=0.2, contrast=0.1, saturation=0.1, hue=0.1),#参数1为亮度,参数2为对比度,参数3为饱和度,参数4为色相
transforms.RandomGrayscale(p=0.025),#概率转换成灰度率,3通道就是R=G=B
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])#均值,标准差
]),
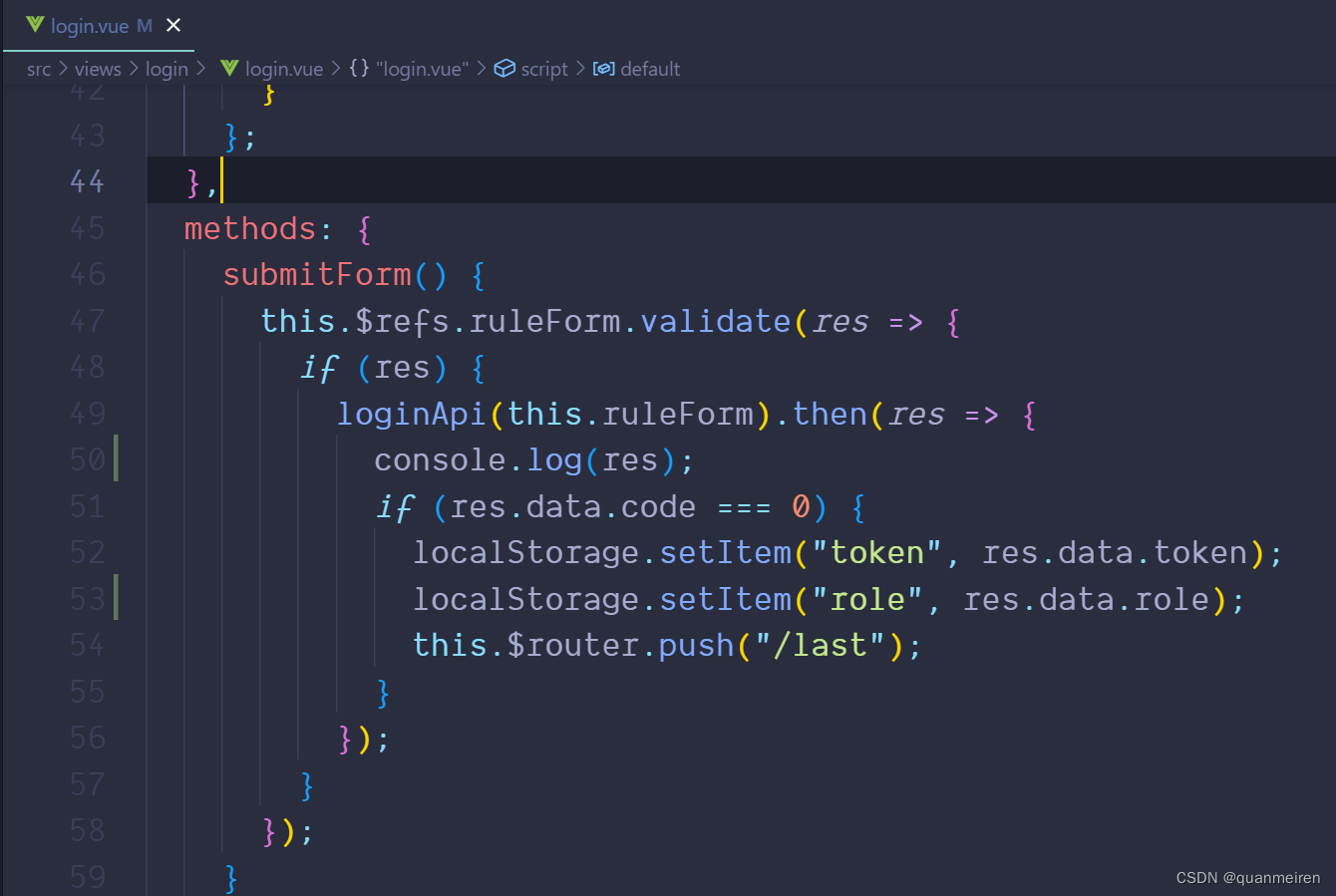
'val': transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
}
#在 Colab 文件系统的 /content/drive/ 目录下挂载您的 Google Drive
from google.colab import drive
drive.mount('/content/drive/')
Mounted at /content/drive/
# 指定当前的工作文件夹
import os
# 此处为google drive中的文件路径,drive为之前指定的工作根目录,要加上
os.chdir("/content/drive/MyDrive/app/")
batch_size = 8
##datasets.ImageFolder 函数接受两个参数:
# root:数据集的根目录,应该包含各个类别的子目录。
# transform:一个可调用对象,用于对图像进行预处理。当加载图像数据时,将对每个图像应用此转换。
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x), data_transforms[x]) for x in ['train', 'val']}
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x], batch_size=batch_size, shuffle=True) for x in ['train', 'val']}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val']}
#image_datasets['val']是一个类,classes是它的类属性,为文件的类别的名称自动生成的一个列表
class_names = image_datasets['val'].classes
class_names
['daisy', 'dandelion', 'roses', 'sunflowers', 'tulips']
image_datasets
{'train': Dataset ImageFolder
Number of datapoints: 3306
Root location: ./flower_data/train
StandardTransform
Transform: Compose(
RandomRotation(degrees=[-45.0, 45.0], interpolation=nearest, expand=False, fill=0)
CenterCrop(size=(224, 224))
RandomHorizontalFlip(p=0.5)
RandomVerticalFlip(p=0.5)
ColorJitter(brightness=(0.8, 1.2), contrast=(0.9, 1.1), saturation=(0.9, 1.1), hue=(-0.1, 0.1))
RandomGrayscale(p=0.025)
ToTensor()
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
),
'val': Dataset ImageFolder
Number of datapoints: 364
Root location: ./flower_data/val
StandardTransform
Transform: Compose(
Resize(size=256, interpolation=bilinear, max_size=None, antialias=warn)
CenterCrop(size=(224, 224))
ToTensor()
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
)}
###说明读取的凸显的像素值是在0~255之间的
from PIL import Image
# 获取第一张图像的路径
image_path, _ = image_datasets["train"].imgs[0]
# 使用 PIL 库从文件中读取图像数据
image = Image.open(image_path)
# 查看图像数据的像素值
print(np.array(image))
[[[135 135 133]
[138 138 136]
[142 142 142]
...
[153 153 153]
[156 156 156]
[148 148 148]]
[[134 134 132]
[137 137 135]
[141 141 139]
...
[153 153 153]
[156 156 156]
[148 148 148]]
[[133 133 131]
[136 136 134]
[141 141 139]
...
[153 153 153]
[155 155 155]
[146 146 146]]
...
[[ 45 48 27]
[ 44 47 26]
[ 44 47 26]
...
[130 126 125]
[130 126 125]
[129 125 124]]
[[ 44 47 26]
[ 44 47 26]
[ 44 47 26]
...
[130 126 125]
[130 126 125]
[130 126 125]]
[[ 44 47 26]
[ 44 47 26]
[ 44 47 26]
...
[132 128 127]
[132 128 127]
[132 128 127]]]
dataloaders
{'train': <torch.utils.data.dataloader.DataLoader at 0x7891d09dfa90>,
'val': <torch.utils.data.dataloader.DataLoader at 0x7891d09dfa00>}
class_names
['daisy', 'dandelion', 'roses', 'sunflowers', 'tulips']
dataset_sizes
{'train': 3306, 'val': 364}
#将类的数字与名称对应起来,在训练测试的数据集中,是按照从0~n-1的顺序,对类名进行排序的
cat_to_name={
"0":"daisy",
"1":"dandelion",
"2":"roses",
"3":"sunflowers",
"4":"tulips"
}
cat_to_name
{'0': 'daisy',
'1': 'dandelion',
'2': 'roses',
'3': 'sunflowers',
'4': 'tulips'}
def im_convert(tensor):
""" 展示数据"""
#这行代码将输入张量从 GPU 转移到 CPU,然后创建一个副本并从计算图中分离。
image = tensor.to("cpu").clone().detach()
#这行代码将张量转换为NumPy数组,并删除所有大小为1的维度。(大小为1的维度指的是形状为1的那个数据)
image = image.numpy().squeeze()
#这行代码将图像数据的维度从 (channels, height, width) 转置为 (height, width, channels)。
image = image.transpose(1, 2, 0)
#这行代码使用之前用于标准化图像数据的均值和标准差对图像数据进行反向标准化,以恢复原始的像素值。
image = image * np.array((0.229, 0.224, 0.225)) + np.array((0.485, 0.456, 0.406)) # 还原回去
#这行代码将图像数据中的所有像素值裁剪到 [0, 1] 范围内(计算机中像素值在 0 和 1 之间的值表示不同深浅的灰色,所以需要进行转化)
image = image.clip(0, 1)
return image
#这行代码使用 matplotlib.pyplot.figure 函数创建了一个新的图像显示区域,其大小为 20x12 英寸。
fig=plt.figure(figsize=(20, 12))
columns = 4
rows = 2
#这行代码使用 iter 函数从验证集的数据加载器中获取一个数据迭代器
dataiter = iter(dataloaders['val'])
#这行代码使用 next 函数从数据迭代器中获取一批图像数据和对应的类别标签。
inputs, classes = next(dataiter)
<Figure size 2000x1200 with 0 Axes>
for i in range(5):
print([classes[i]])
# cat_to_name[str(int())]
[tensor(2)]
[tensor(0)]
[tensor(1)]
[tensor(1)]
[tensor(1)]
for idx in range (columns*rows):
#xticks=[] 和 yticks=[] 表示不显示子图的 x 轴和 y 轴刻度
#ig.add_subplot 是 Matplotlib 库中用于在图形中添加子图的函数。它接受多个参数,其中前三个参数分别表示子图的行数、列数和索引
ax = fig.add_subplot(rows, columns, idx+1, xticks=[], yticks=[])
print(class_names[classes[idx]],classes[idx])
ax.set_title(class_names[classes[idx]])
plt.imshow(im_convert(inputs[idx]))
plt.show()
roses tensor(2)
sunflowers tensor(3)
tulips tensor(4)
dandelion tensor(1)
sunflowers tensor(3)
daisy tensor(0)
dandelion tensor(1)
dandelion tensor(1)

model_name = 'resnet' #可选的比较多 ['resnet', 'alexnet', 'vgg', 'squeezenet', 'densenet', 'inception']
#是否用人家训练好的特征来做
feature_extract = True
# 是否用GPU训练
train_on_gpu = torch.cuda.is_available()
if not train_on_gpu:
print('CUDA is not available. Training on CPU ...')
else:
print('CUDA is available! Training on GPU ...')
#用于指定张量运算设备的函数
# "cuda:0",表示使用第一个 CUDA 设备;"cpu",表示使用 CPU。
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
CUDA is available! Training on GPU ...
#则该函数将遍历模型的所有参数,并将它们的 requires_grad 属性设置为 False。这意味着在训练过程中,这些参数不会更新。
def set_parameter_requires_grad(model, feature_extracting):
if feature_extracting:
for param in model.parameters():
param.requires_grad = False
model_ft = models.resnet152()
model_ft
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(6): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(7): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(6): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(7): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(8): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(9): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(10): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(11): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(12): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(13): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(14): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(15): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(16): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(17): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(18): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(19): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(20): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(21): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(22): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(23): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(24): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(25): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(26): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(27): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(28): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(29): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(30): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(31): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(32): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(33): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(34): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(35): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
def initialize_model(model_name, num_classes, feature_extract, use_pretrained=True):
# 选择合适的模型,不同模型的初始化方法稍微有点区别
model_ft = None
input_size = 0
if model_name == "resnet":
""" Resnet152
"""
# 最后,将输入大小设置为 224。
# 创建一个预训练的 ResNet-152 模型,并将其赋值给变量 model_ft。use_pretrained 参数决定是否使用预训练的权重。
model_ft = models.resnet152(pretrained=use_pretrained)
# 接下来,调用 set_parameter_requires_grad 函数,该函数接受两个参数:model_ft 和 feature_extract。如果 feature_extract 为真,则该函数将遍历模型的所有参数,并将它们的 requires_grad 属性设置为 False。
# 这意味着在训练过程中,这些参数不会更新。
set_parameter_requires_grad(model_ft, feature_extract)
# 然后,获取模型的全连接层(fc)的输入特征数,并将其赋值给变量 num_ftrs。接着,
num_ftrs = model_ft.fc.in_features
#用一个新的顺序容器(nn.Sequential)替换模型的全连接层。
# 这个顺序容器包含两个层:一个线性层(nn.Linear),它将输入特征数从 num_ftrs 减少到 5;
# 以及一个对数 Softmax 层(nn.LogSoftmax),它沿着维度 1 对输入进行归一化。
#新创建的层的梯度默认是需要更新的。所以,最后需要更新的梯度就是修改后的全连接层的梯度和偏置
model_ft.fc = nn.Sequential(nn.Linear(num_ftrs, 5),
nn.LogSoftmax(dim=1))
#在某些情况下,使用 LogSoftmax 可以提高数值稳定性(先softmax,在取对数)
input_size = 224
elif model_name == "alexnet":
""" Alexnet
"""
model_ft = models.alexnet(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
num_ftrs = model_ft.classifier[6].in_features
model_ft.classifier[6] = nn.Linear(num_ftrs,num_classes)
input_size = 224
elif model_name == "vgg":
""" VGG11_bn
"""
model_ft = models.vgg16(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
num_ftrs = model_ft.classifier[6].in_features
model_ft.classifier[6] = nn.Linear(num_ftrs,num_classes)
input_size = 224
elif model_name == "squeezenet":
""" Squeezenet
"""
model_ft = models.squeezenet1_0(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
model_ft.classifier[1] = nn.Conv2d(512, num_classes, kernel_size=(1,1), stride=(1,1))
model_ft.num_classes = num_classes
input_size = 224
elif model_name == "densenet":
""" Densenet
"""
model_ft = models.densenet121(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
num_ftrs = model_ft.classifier.in_features
model_ft.classifier = nn.Linear(num_ftrs, num_classes)
input_size = 224
elif model_name == "inception":
""" Inception v3
Be careful, expects (299,299) sized images and has auxiliary output
"""
model_ft = models.inception_v3(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
# Handle the auxilary net
num_ftrs = model_ft.AuxLogits.fc.in_features
model_ft.AuxLogits.fc = nn.Linear(num_ftrs, num_classes)
# Handle the primary net
num_ftrs = model_ft.fc.in_features
model_ft.fc = nn.Linear(num_ftrs,num_classes)
input_size = 299
else:
print("Invalid model name, exiting...")
exit()
return model_ft, input_size
model_ft, input_size = initialize_model(model_name, 5, feature_extract, use_pretrained=True)
#GPU计算
model_ft = model_ft.to(device)
# 模型保存
filename='checkpoint.pth'
# 是否训练所有层
#这段代码的作用是确定哪些参数需要在训练过程中更新。
# 如果 feature_extract 为真,则只有那些 requires_grad 属性为真的参数才会被更新;
# 否则,所有参数都会被更新。
params_to_update = model_ft.parameters()
print("Params to learn:")
if feature_extract:
params_to_update = []
#您可以遍历这个迭代器,获取模型中所有命名参数的名称和值。
#每次迭代都会返回一个元组,其中第一个元素是参数的名称,第二个元素是参数的值(即一个张量)。您可以使用这些信息来访问、修改或保存模型中的参数。
for name,param in model_ft.named_parameters():
if param.requires_grad == True:
params_to_update.append(param)
print("\t",name)
else:
for name,param in model_ft.named_parameters():
if param.requires_grad == True:
print("\t",name)
/usr/local/lib/python3.10/dist-packages/torchvision/models/_utils.py:208: UserWarning: The parameter 'pretrained' is deprecated since 0.13 and may be removed in the future, please use 'weights' instead.
warnings.warn(
/usr/local/lib/python3.10/dist-packages/torchvision/models/_utils.py:223: UserWarning: Arguments other than a weight enum or `None` for 'weights' are deprecated since 0.13 and may be removed in the future. The current behavior is equivalent to passing `weights=ResNet152_Weights.IMAGENET1K_V1`. You can also use `weights=ResNet152_Weights.DEFAULT` to get the most up-to-date weights.
warnings.warn(msg)
Downloading: "https://download.pytorch.org/models/resnet152-394f9c45.pth" to /root/.cache/torch/hub/checkpoints/resnet152-394f9c45.pth
100%|██████████| 230M/230M [00:01<00:00, 210MB/s]
Params to learn:
fc.0.weight
fc.0.bias
#优化器设置
optimizer_ft = optim.Adam(params_to_update, lr=1e-2)
#optim.lr_scheduler.StepLR是学习率调度器,用于在训练过程中按照固定步长调整学习率。
#optimizer_ft 是要调整学习率的优化器。
#step_size 指定了每隔多少个 epoch 调整一次学习率。
#gamma 指定了每次调整时学习率的衰减系数(衰减为原来的)
#动态调整学习率:
#动态调整学习率是一种常用的优化技巧,它可以帮助模型更快地收敛,同时避免陷入局部最优解。
scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)#学习率每7个epoch衰减成原来的1/10
#最后一层已经LogSoftmax()了,所以不能nn.CrossEntropyLoss()来计算了,nn.CrossEntropyLoss()相当于logSoftmax()和nn.NLLLoss()整合
criterion = nn.NLLLoss()
def train_model(model, dataloaders, criterion, optimizer, num_epochs=15, is_inception=False,filename=filename):
since = time.time()
print('start')
print('start time:{}'.format(since))
best_acc = 0
"""
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc']
model.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
model.class_to_idx = checkpoint['mapping']
"""
model.to(device)
val_acc_history = []
train_acc_history = []
train_losses = []
valid_losses = []
#这行代码创建了一个名为 LRs 的列表,并将其初始化为优化器的第一个参数组的学习率。
LRs = [optimizer.param_groups[0]['lr']]
best_model_wts = copy.deepcopy(model.state_dict())
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# 训练和验证
for phase in ['train', 'val']:
if phase == 'train':
model.train() # 训练
else:
model.eval() # 验证
running_loss = 0.0
running_corrects = 0
# 把数据都取个遍
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# 清零
optimizer.zero_grad()
# 只有训练的时候计算和更新梯度
with torch.set_grad_enabled(phase == 'train'):
if is_inception and phase == 'train':
#is_inception 参数是一个布尔值,它指示模型是否为 Inception 模型。
# 这个参数的作用是控制训练过程中损失函数的计算方式。
#Inception 模型与其他模型不同,它在训练阶段会输出两个预测结果:一个主输出和一个辅助输出。
# 这两个输出都需要计算损失,并将它们相加以获得最终的损失。
#因此,当 is_inception 参数为 True 时,train_model 函数会计算两个输出(主输出和辅助输出)并将它们的损失相加;
# 否则只计算一个输出并计算损失
outputs, aux_outputs = model(inputs)
loss1 = criterion(outputs, labels)
loss2 = criterion(aux_outputs, labels)
loss = loss1 + 0.4*loss2
else:#resnet执行的是这里
outputs = model(inputs)
loss = criterion(outputs, labels)
_, preds = torch.max(outputs, 1)
# 训练阶段更新权重
if phase == 'train':
loss.backward()
optimizer.step()
# 计算损失
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
#len(dataloaders[phase].dataset) 返回的是数据集中样本的数量
epoch_loss = running_loss / len(dataloaders[phase].dataset)
epoch_acc = running_corrects.double() / len(dataloaders[phase].dataset)
time_elapsed = time.time() - since
print('Time elapsed {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
# 得到最好那次的模型
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
state = {
'state_dict': model.state_dict(),
'best_acc': best_acc,
'optimizer' : optimizer.state_dict(),
}
torch.save(state, filename)
if phase == 'val':
val_acc_history.append(epoch_acc)
valid_losses.append(epoch_loss)
scheduler.step(epoch_loss)
if phase == 'train':
train_acc_history.append(epoch_acc)
train_losses.append(epoch_loss)
print('Optimizer learning rate : {:.7f}'.format(optimizer.param_groups[0]['lr']))
LRs.append(optimizer.param_groups[0]['lr'])
print()
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# 训练完后用最好的一次当做模型最终的结果
model.load_state_dict(best_model_wts)
return model, val_acc_history, train_acc_history, valid_losses, train_losses, LRs
model_ft,val_acc_history, train_acc_history, valid_losses, train_losses, LRs = train_model(
model_ft,
dataloaders,
criterion,
optimizer_ft,
num_epochs=15,
is_inception=(model_name=="inception"))
start
start time:1689599511.8162656
Epoch 0/14
----------
Time elapsed 1m 8s
train Loss: 1.9054 Acc: 0.7275
Time elapsed 2m 33s
val Loss: 1.2659 Acc: 0.8022
/usr/local/lib/python3.10/dist-packages/torch/optim/lr_scheduler.py:152: UserWarning: The epoch parameter in `scheduler.step()` was not necessary and is being deprecated where possible. Please use `scheduler.step()` to step the scheduler. During the deprecation, if epoch is different from None, the closed form is used instead of the new chainable form, where available. Please open an issue if you are unable to replicate your use case: https://github.com/pytorch/pytorch/issues/new/choose.
warnings.warn(EPOCH_DEPRECATION_WARNING, UserWarning)
Optimizer learning rate : 0.0100000
Epoch 1/14
----------
Time elapsed 3m 42s
train Loss: 2.0493 Acc: 0.7441
Time elapsed 3m 47s
val Loss: 1.1252 Acc: 0.8489
Optimizer learning rate : 0.0100000
Epoch 2/14
----------
Time elapsed 4m 56s
train Loss: 1.8354 Acc: 0.7613
Time elapsed 5m 1s
val Loss: 1.4777 Acc: 0.8214
Optimizer learning rate : 0.0100000
Epoch 3/14
----------
Time elapsed 6m 8s
train Loss: 2.5023 Acc: 0.7435
Time elapsed 6m 14s
val Loss: 1.2857 Acc: 0.8571
Optimizer learning rate : 0.0100000
Epoch 4/14
----------
Time elapsed 7m 26s
train Loss: 2.5558 Acc: 0.7498
Time elapsed 7m 31s
val Loss: 1.6471 Acc: 0.8297
Optimizer learning rate : 0.0100000
Epoch 5/14
----------
Time elapsed 8m 39s
train Loss: 2.1794 Acc: 0.7750
Time elapsed 8m 44s
val Loss: 3.2248 Acc: 0.7720
Optimizer learning rate : 0.0100000
Epoch 6/14
----------
Time elapsed 9m 51s
train Loss: 2.0586 Acc: 0.7743
Time elapsed 9m 56s
val Loss: 2.0742 Acc: 0.8352
Optimizer learning rate : 0.0100000
Epoch 7/14
----------
Time elapsed 11m 4s
train Loss: 2.4212 Acc: 0.7650
Time elapsed 11m 9s
val Loss: 1.8923 Acc: 0.8242
Optimizer learning rate : 0.0100000
Epoch 8/14
----------
Time elapsed 12m 16s
train Loss: 2.3816 Acc: 0.7662
Time elapsed 12m 22s
val Loss: 1.4925 Acc: 0.8544
Optimizer learning rate : 0.0100000
Epoch 9/14
----------
Time elapsed 13m 28s
train Loss: 2.5423 Acc: 0.7641
Time elapsed 13m 34s
val Loss: 2.5128 Acc: 0.8104
Optimizer learning rate : 0.0100000
Epoch 10/14
----------
Time elapsed 14m 41s
train Loss: 2.2726 Acc: 0.7725
Time elapsed 14m 46s
val Loss: 2.7966 Acc: 0.7830
Optimizer learning rate : 0.0100000
Epoch 11/14
----------
Time elapsed 15m 53s
train Loss: 1.9939 Acc: 0.7916
Time elapsed 15m 59s
val Loss: 1.2285 Acc: 0.8489
Optimizer learning rate : 0.0100000
Epoch 12/14
----------
Time elapsed 17m 5s
train Loss: 2.3146 Acc: 0.7743
Time elapsed 17m 10s
val Loss: 1.0918 Acc: 0.8901
Optimizer learning rate : 0.0100000
Epoch 13/14
----------
Time elapsed 18m 19s
train Loss: 2.2697 Acc: 0.7831
Time elapsed 18m 25s
val Loss: 1.5753 Acc: 0.8434
Optimizer learning rate : 0.0100000
Epoch 14/14
----------
Time elapsed 19m 31s
train Loss: 2.2527 Acc: 0.7837
Time elapsed 19m 37s
val Loss: 1.6497 Acc: 0.8462
Optimizer learning rate : 0.0100000
Training complete in 19m 37s
Best val Acc: 0.890110
for param in model_ft.parameters():
param.requires_grad = True
# 再继续训练所有的参数,学习率调小一点
optimizer = optim.Adam(params_to_update, lr=1e-4)
scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
# 损失函数
criterion = nn.NLLLoss()
# Load the checkpoint
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc']
model_ft.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
#model_ft.class_to_idx = checkpoint['mapping']
model_ft,val_acc_history,train_acc_history,valid_losses,train_losses,LRs =
train_model(model_ft,
dataloaders,
criterion,
optimizer,
num_epochs=10,
is_inception=(model_name=="inception"))
model_ft, input_size = initialize_model(model_name, 5, feature_extract, use_pretrained=True)
# GPU模式
model_ft = model_ft.to(device)
# 保存文件的名字
filename='checkpoint.pth'
# 加载模型
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc']
model_ft.load_state_dict(checkpoint['state_dict'])
<All keys matched successfully>
def imshow(image, ax=None, title=None):
"""展示数据"""
#创建图形和子图
if ax is None:
fig, ax = plt.subplots()
# 颜色通道还原
image = np.array(image).transpose((1, 2, 0))
# 预处理还原
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
image = std * image + mean
#用于将数组中的元素限制在指定范围内,参数为:要处理的数组、最小值和最大值。
image = np.clip(image, 0, 1)
ax.imshow(image)
ax.set_title(title)
return ax
image_path = '909277823_e6fb8cb5c8_n.jpg'
img = process_image(image_path)
imshow(img)
<Axes: >

def process_image(image_path):
# 读取测试数据
img = Image.open(image_path)
#如果图像的原始尺寸小于给定的最大尺寸,则不会进行任何调整。
# Resize,thumbnail方法只能进行缩小,所以进行了判断
#只是将较短的边缩放到256
#同时:根据图像的宽高比计算新的宽度,以保证图像不会变形
if img.size[0] > img.size[1]:
#由于 10000 远大于图像的原始宽度,因此实际上只有高度会被调整为 256 像素。
#宽度会根据图像的宽高比自动调整,以保证图像不会变形
img.thumbnail((10000, 256))
else:
img.thumbnail((256, 10000))
# Crop操作(矩形,对角线线上的点,(a,b),(c,d))
left_margin = (img.width-224)/2
bottom_margin = (img.height-224)/2
right_margin = left_margin + 224
top_margin = bottom_margin + 224
img = img.crop((left_margin, bottom_margin, right_margin,
top_margin))
# 相同的预处理方法
img = np.array(img)/255
mean = np.array([0.485, 0.456, 0.406]) #provided mean
std = np.array([0.229, 0.224, 0.225]) #provided std
img = (img - mean)/std
#将图像归一化,然后标准化
# 注意颜色通道应该放在第一个位置
img = img.transpose((2, 0, 1))
return img
# 得到一个batch的测试数据
dataiter = iter(dataloaders['val'])
images, labels = next(dataiter)
model_ft.eval()
if train_on_gpu:
output = model_ft(images.cuda())
else:
output = model_ft(images)
labels
tensor([1, 2, 4, 0, 3, 0, 3, 0])
labels[2]
tensor(4)
_, preds_tensor = torch.max(output, 1)
preds = np.squeeze(preds_tensor.numpy()) if not train_on_gpu else np.squeeze(preds_tensor.cpu().numpy())
preds
array([1, 2, 4, 0, 3, 1, 3, 0])
fig=plt.figure(figsize=(20, 20))
columns =4
rows = 2
for idx in range (columns*rows):
ax = fig.add_subplot(rows, columns, idx+1, xticks=[], yticks=[])
plt.imshow(im_convert(images[idx]))
ax.set_title("{} ({})".format(class_names[(preds[idx])], class_names[(labels[idx].item())]),
color=("green" if class_names[(preds[idx])]==class_names[(labels[idx].item())] else "red"))
plt.show()