基于工具坐标系的移动偏转。
基于TCP旋转的特点在于,具有1个固定端点,多个活动端的特点。
我们在建立TCP左边偏移的时候,可以将2个点近似的模拟在同一个坐标系下
基于TCP偏转的特点在于,工作的时候,示教点与工作点的位置相近,并且示教与工作时必然有一个点是出于固定状态,另一个点处于移动。
初始状态:
我们已知示教点1和点2的坐标,已知示教的2点距离,已知工作点1和点2的坐标,机器人示教POS角度。
第一步:我们近似的将2个点放在同一坐标系下
第二步:计算出工作点1与工作点2的X的偏移量和Y的偏移量。
第三步:将机器人的示教点1移动到工作点1中。
第四步:由拟合的工作线计算工作线的角度
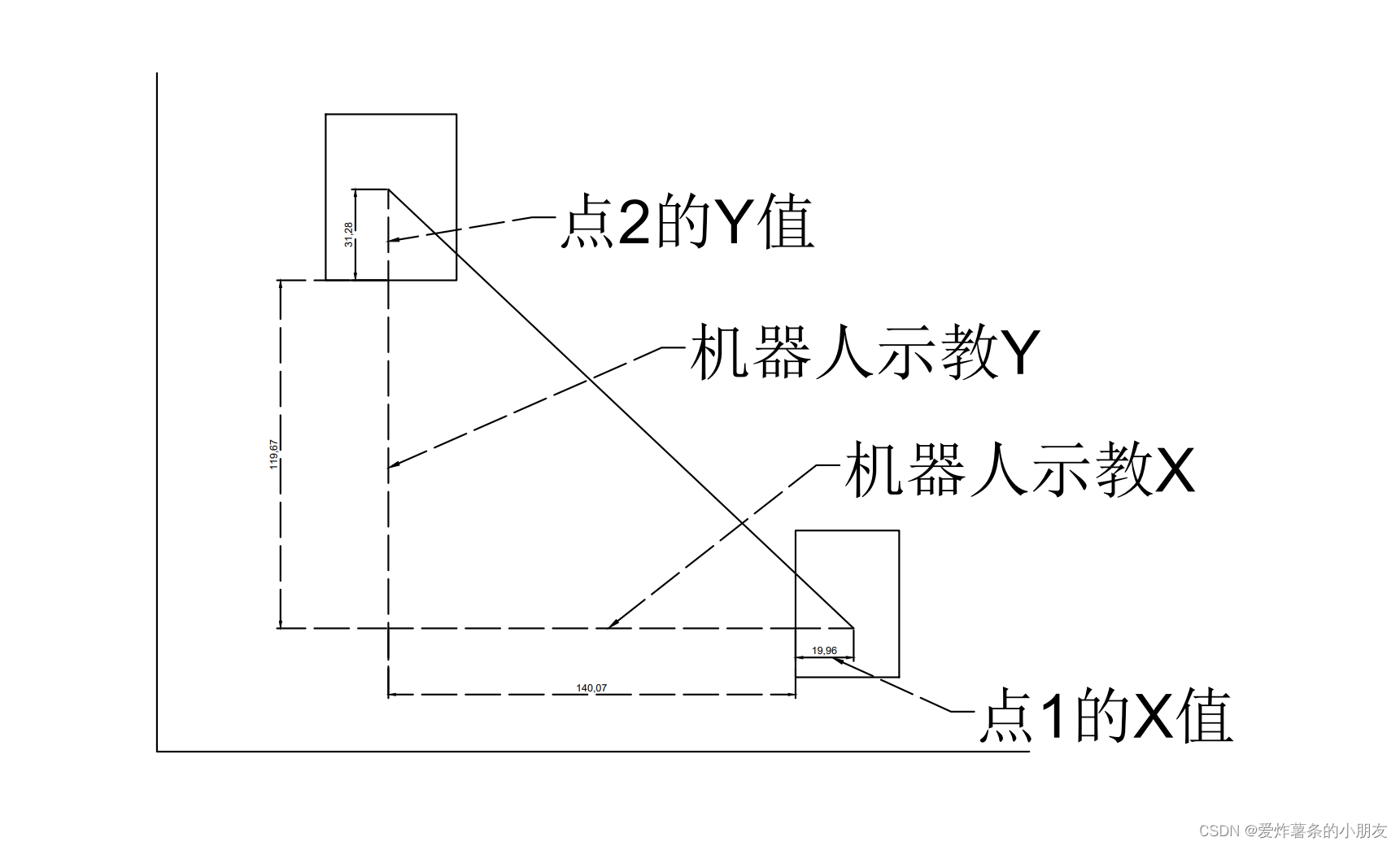
由上图所示:我们的拍照的位置是在示教的时候就已经确定下来的。所以我们在示教时可以直接获得机器人示教Y和机器人的示教X。将机器人的示教X+点1的X值(示坐标轴来定)=X边;将机器人的示教Y+点2的Y值(示坐标轴来定)=Y边。这时候工作角度θ=arctan(Y边/X边)。
所以我们可以得到机器人需要的偏移角度=示教角度-工作角度。
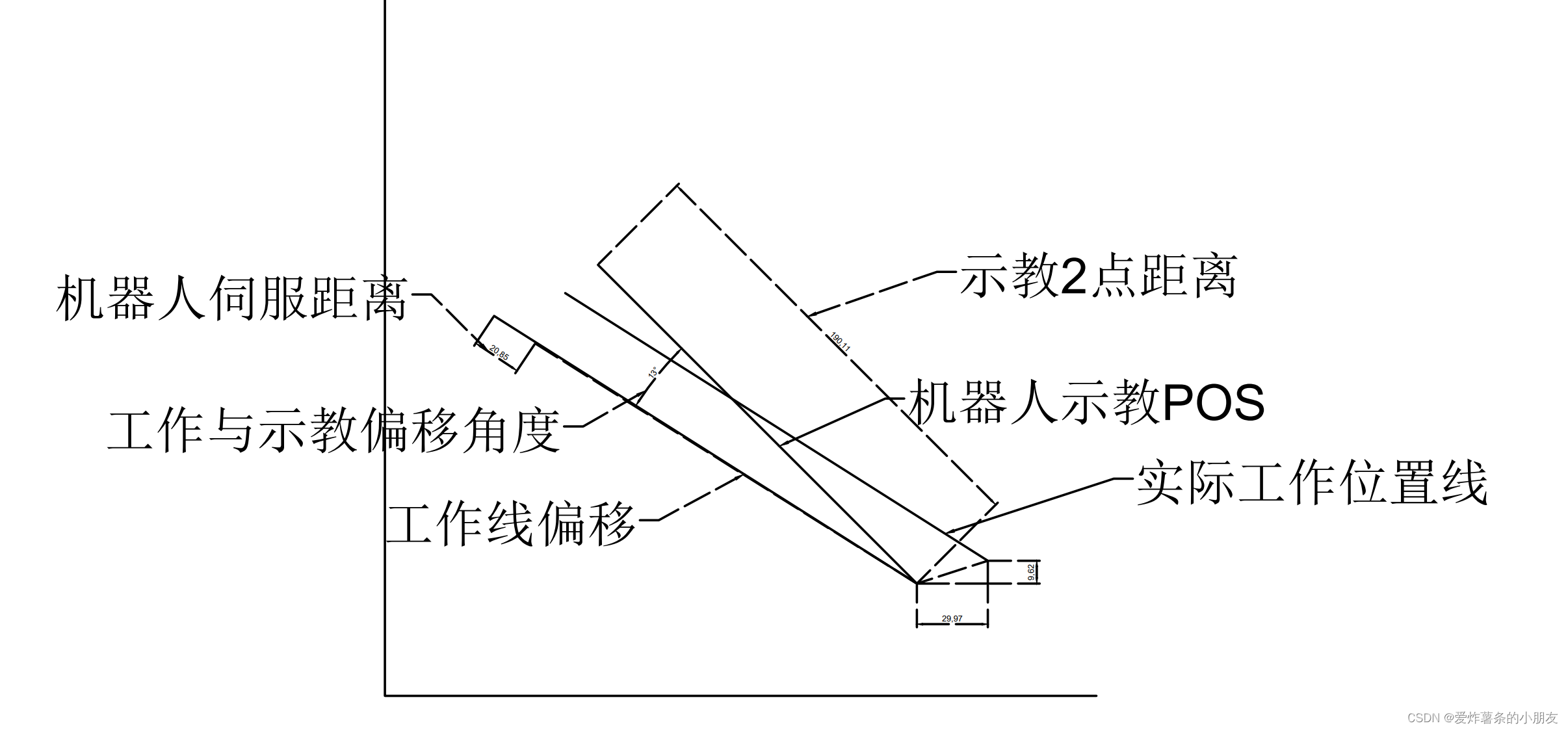
第五步:我们将工作线按偏移角度进行旋转后,可以开始计算机器手的伺服偏移距离。
由于我们的初始的伺服距离就是当前机器人姿态下(POS)的示教伺服距离,在实际工作距离中由于部分原因导致2点距离并不是一定相等的,所以要计算出机器人的伺服偏移距离。
我们工作线的长度可以使用三角函数直接求得。工作距离=根号2(X边平方+Y边平方)。
伺服距离=工作距离-机器人示教距离。
最终,我们要输出的数据为:机器人伺服距离,机器人偏移角度,点1与示教点1的偏移X和Y值。


![[附源码]计算机毕业设计基于vue+mysql开发的考试系统Springboot程序](https://img-blog.csdnimg.cn/3c4d26c146324d7db9fb6c118af1b571.png)