文章目录
- 0 引言
- 1 安装依赖
- 1.1 grid map
- 1.2 Eigen
- 1.3 kindr
- 1.4 Point Cloud Library (PCL)
- 2 编译和问题解决
- 3 运行示例
- 3.1 turtlesim3_waffle_demo
- 3.2 simple_demo 和 Ground Truth Demo
0 引言
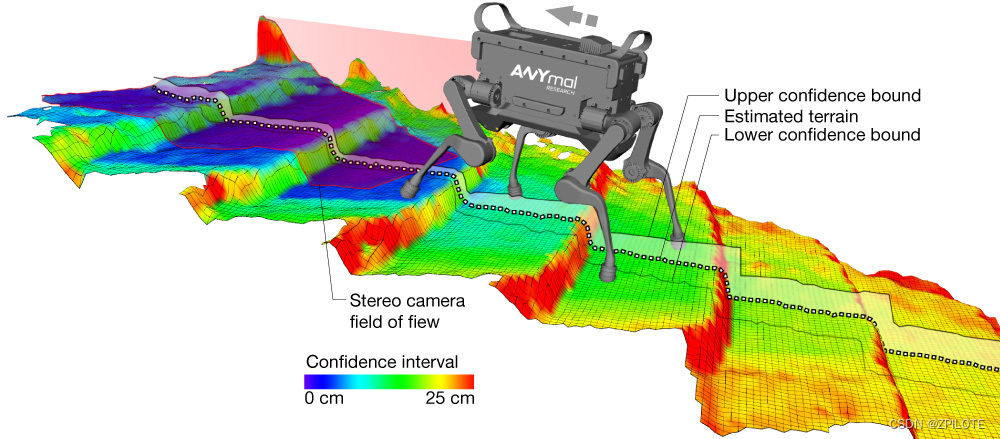
苏黎世开源的elevation mapping指的是苏黎世联邦理工学院(ETH Zurich)开发并开源的一个数字高程模型(Digital Elevation Model,DEM)处理工具,名为elevation,它可以用于处理和分析高程数据,生成高质量的数字高程模型,支持多种高程数据格式和多种高程插值方法。如下图所示,这个高程图项目让机器人在爬楼梯等方面更加稳定。
苏黎世开源的elevation mapping工程包含两个子工程elevation_mapping和elevation_mapping_demos,以下是每个子工程的简要介绍:
-
data:这个子文件夹包含了一些测试数据和示例数据,这些数据可用于测试和演示elevation mapping工具的功能和性能。 -
doc:这个子文件夹包含了elevation mapping工具的文档和说明,包括使用指南、API文档、开发者文档等等。 -
include:这个子文件夹包含了elevation mapping工具的头文件,这些头文件定义了elevation mapping工具中使用的各种数据类型、函数和类等等。 -
lib:这个子文件夹包含了elevation mapping工具所依赖的第三方库和工具,例如GDAL、Boost、zlib等等。 -
src:这个子文件夹包含了elevation mapping工具的源代码,包括数据下载和处理模块、数据处理和分析模块、数字高程模型生成和输出模块、用户接口模块等等。 -
test:这个子文件夹包含了elevation mapping工具的测试代码和测试数据,用于测试elevation mapping工具的正确性和稳定性。 -
tools:这个子文件夹包含了一些与elevation mapping工具相关的辅助工具,例如数据转换工具、可视化工具等等。
这些子工程提供了elevation mapping库的核心功能和一些demo演示功能,使得elevation mapping工具更加完善和易于使用。
👉 elevation mapping github:https://github.com/ANYbotics/elevation_mapping
·
本文系统环境:
- Ubuntu18.04
- ROS-melodic
- OpenCV3.2.0
- Eigen 3.3.4
- PCL 1.8.1
1 安装依赖
1.1 grid map
首先安装 grid map 栅格地图库:
# sudo apt-get install ros-$ROS_DISTRO-grid-map
sudo apt-get install ros-melodic-grid-map
1.2 Eigen
elevation mapping 工程需要线性代数库eigen:
sudo apt-get install libeigen3-dev
1.3 kindr
直接源码安装即可:
git clone https://github.com/ANYbotics/kindr.git
cd kindr
mkdir build && cd build
cmake .. -DUSE_CMAKE=true
sudo make install
1.4 Point Cloud Library (PCL)
本文是安装了pcl1.8大版本,可先下载 下载pcl 1.8.1 版本(点击Source code(zip)
先安装pcl1.8.1所需的依赖库:
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk7.1-qt libvtk7.1
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
然后解压下载的pcl1.8.1源码,并进入到pcl1.8.1文件夹中:
mkdir build
cd build
cmake ..
make -j4
sudo make install
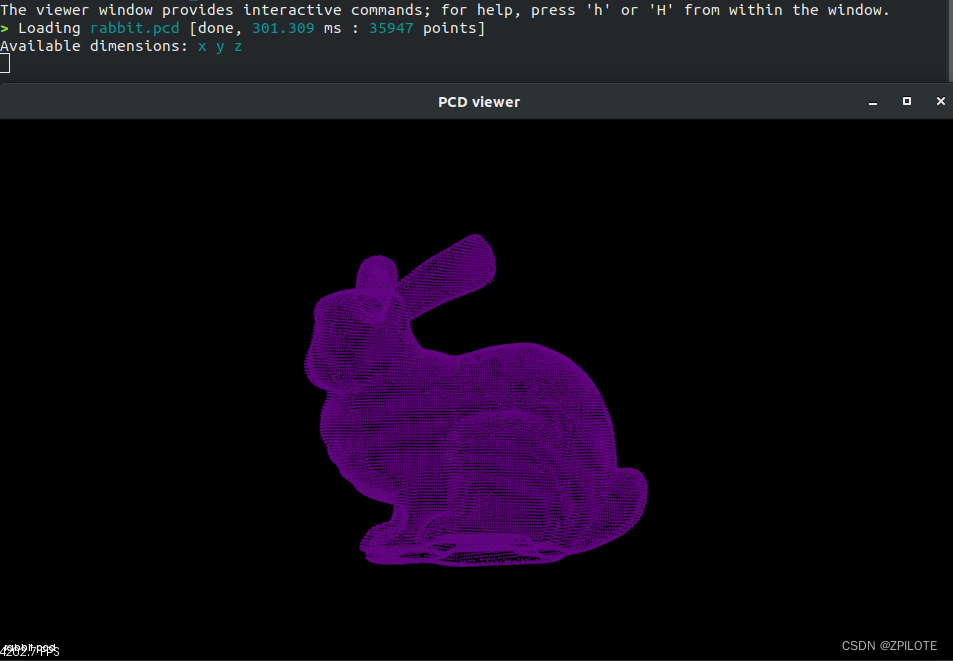
测试pcl是否安装成功的话,可用pcl_viewer xxx.pcd:
如果没有pcd文件,可去点云库PCL(Point Cloud Library)的学习资源汇总下载rabbit.pcd
pcl_viewer rabbit.pcd
2 编译和问题解决
为了最大限度地提高性能,请确保以发布(Release)模式构建:
mkdir -p ~/ele_map_ws/src
cd ~/ele_map_ws/src
git clone https://github.com/anybotics/elevation_mapping.git
git clone https://github.com/ANYbotics/kindr_ros.git
cd ..
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
catkin build
catkin build 编译后出现如下错误,kindr_ros 库的原因:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "kindr" with any of
the following names:
kindrConfig.cmake
kindr-config.cmake
解决办法:可以修改catkin build为 catkin_make 来进行编译
cd ~/ele_map_ws
rm -rf build devel logs
catkin_make -DCMAKE_BUILD_TYPE=Release
重新执行catkin_make -DCMAKE_BUILD_TYPE=Release,发现编译通过:
[ 94%] Linking CXX shared library ~/ele_map_ws/src/ele_map/devel/lib/libelevation_mapping_library.so
[ 94%] Built target elevation_mapping_library
Scanning dependencies of target elevation_mapping
[ 97%] Building CXX object elevation_mapping/elevation_mapping/CMakeFiles/elevation_mapping.dir/src/elevation_mapping_node.cpp.o
[100%] Linking CXX executable ~/ele_map_ws/src/ele_map/devel/lib/elevation_mapping/elevation_mapping
[100%] Built target elevation_mapping
3 运行示例
3.1 turtlesim3_waffle_demo
turtlesim3_waffle_demo是elevation mapping高程图功能库利用搭载realsense仿真相机的turtlebot3仿真机器人不断运动生成高程图的示例,但首先要安装turtlebot3仿真机器人:
## 安装turtlebot3 仿真机器人库
sudo apt install ros-melodic-turtlebot3*
安装需要一段时间,安装完毕后,如下命令,启动两个终端,来演示turtlesim3_waffle_demo
# 终端1,激活环境
source ~/ele_map_ws/devel/setup.bash
roslaunch elevation_mapping_demos turtlesim3_waffle_demo.launch
# 终端2,启动并控制仿真机器人
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
在第二个终端,用 s 键控制小车暂停,而 w a d x 分别对应控制小车前进 左转 右转 后退
启动后,发现rviz并没有生成高程图,而且发现终端1报错:
import rospkg
ModuleNotFoundError: No module named 'rospkg'
很明显是缺少rospkg库,直接执行pip install rospkg 安装,但是确定已经安装了,还是出现这个问题;
思考片刻后,针对python3,也安装rospkg,直接执行pip3 install rospkg 安装,这次安装后,问题不再出现。
重新启动后,又出现新的问题:
"~/ele_map_ws/src/elevation_mapping/elevation_mapping_demos/scripts/tf_to_pose_publisher.py", line 5, in <module>
import tf
File "/opt/ros/melodic/lib/python2.7/dist-packages/tf/__init__.py", line 30, in <module>
from tf2_ros import TransformException as Exception, ConnectivityException, LookupException, ExtrapolationException
File "/opt/ros/melodic/lib/python2.7/dist-packages/tf2_ros/__init__.py", line 38, in <module>
from tf2_py import *
File "/opt/ros/melodic/lib/python2.7/dist-packages/tf2_py/__init__.py", line 38, in <module>
from ._tf2 import *
ImportError: dynamic module does not define module export function (PyInit__tf2)
...
[ERROR] [1690378396.561700432, 1.420000000]: Could not get pose information from robot for time 0.273000. Buffer empty?
[ERROR] [1690378414.259410433, 18.109000000]: Could not get pose information from robot for time 17.450000. Buffer empty?
...
可以定位到是由于~/ele_map_ws/src/elevation_mapping/elevation_mapping_demos/scripts/tf_to_pose_publisher.py该python脚本出现的问题,再联想上一个问题,针对python3,安装pip3 install rospkg才解决问题,打开tf_to_pose_publisher.py脚本,发现默认用的是python3,但ROS melodic默认用的是python2,而Ubuntu20.04的ROS noetic默认用的是python3。
所以直接修改/tf_to_pose_publisher.py脚本中的第一行#!/usr/bin/env python3为#!/usr/bin/env python2.
重新启动后,问题成功解决;
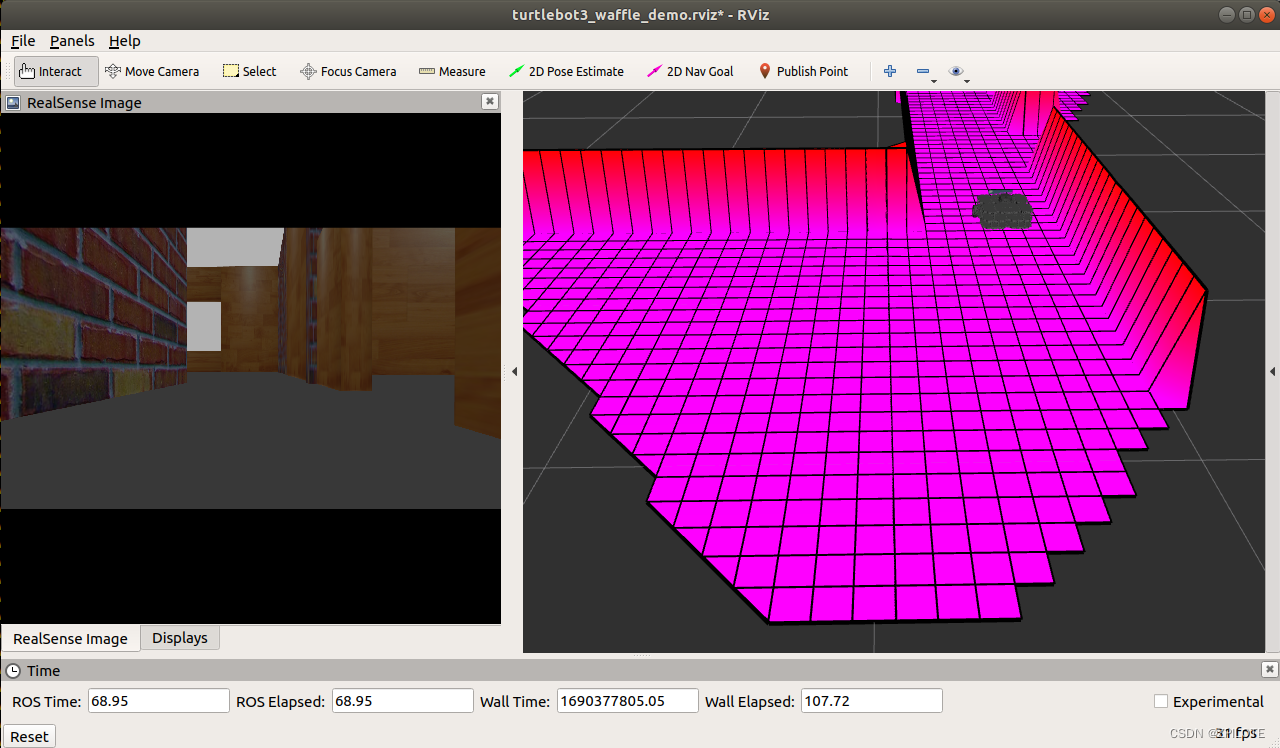
如下所示在rviz中即可看到控制的小车在运动,仿真realsense相机朝前方实时画面,右边在运动到走道附近也会生成elevation mapping高程图:
3.2 simple_demo 和 Ground Truth Demo
Ground Truth Demo是elevation mapping高程图功能的真值示例演示,但首先要编译point_cloud_io库:
cd ~/ele_map_ws/src
git clone https://github.com/ANYbotics/point_cloud_io.git
cd ..
catkin_make -DCMAKE_BUILD_TYPE=Release
编译时point_cloud_io遇到新问题:
~/ele_map_ws/src/point_cloud_io/src/Read.cpp:11:10: fatal error: filesystem: No such file or directory
解决办法:
首先修改~/ele_map_ws/src/point_cloud_io/src/Read.cpp文件:
// 修改1: #include <filesystem> 替换成 #include <experimental/filesystem>
// #include <filesystem>
#include <experimental/filesystem>
// 修改2:两处std::filesystem 替换成 std::experimental::filesystem
bool Read::readFile(const std::string& filePath, const std::string& pointCloudFrameId) {
// if (std::filesystem::path(filePath).extension() == ".ply") {
if (std::experimental::filesystem::path(filePath).extension() == ".ply") {
// Load .ply file.
pcl::PointCloud<pcl::PointXYZRGBNormal> pointCloud;
if (pcl::io::loadPLYFile(filePath, pointCloud) != 0) {
return false;
}
// Define PointCloud2 message.
pcl::toROSMsg(pointCloud, *pointCloudMessage_);
}
#ifdef HAVE_VTK
// else if (std::filesystem::path(filePath).extension() == ".vtk") {
else if (std::experimental::filesystem::path(filePath).extension() == ".vtk") {
// Load .vtk file.
pcl::PolygonMesh polygonMesh;
pcl::io::loadPolygonFileVTK(filePath, polygonMesh);
CMakeLists.txt 中添加-lstdc++fs
target_link_libraries(read
${catkin_LIBRARIES}
-lstdc++fs
)
重新编译不再报错,编译完成后,如下,启动两个终端,来演示simple_demo 和Ground Truth Demo
# 终端1,激活环境
source ~/ele_map_ws/devel/setup.bash
roslaunch elevation_mapping_demos simple_demo.launch
或者Ground Truth Demo
# 终端2,激活环境
source ~/ele_map_ws/devel/setup.bash
roslaunch elevation_mapping_demos ground_truth_demo.launch
启动后,都提示 [ WARN] [1690391331.761879154] : Parameter 'point_cloud_topic' is deprecated, please use 'input_sources' instead的问题,其实就是配置文件中的点云topic需要更改成数据中的点云topic,手边暂时没数据就不试了,后续有空再补。
simple_demo 和Ground Truth Demo分别在以下两个文件中修改:
~/ele_map_ws/src/elevation_mapping/elevation_mapping_demos/config/robots/simple_demo_robot.yaml~/ele_map_ws/src/elevation_mapping/elevation_mapping_demos/config/robots/ground_truth_demo.yaml
至此,成功编译安装elevation mapping高程图,并安装turtlebot3机器人仿真库,搭配turtlebot3机器人运行示例熟悉elevation mapping,同时也熟悉了一个Ground Truth Demo,进一步熟悉elevation mapping.
Reference:
- https://github.com/ANYbotics/elevation_mapping
- https://blog.csdn.net/BIT_HXZ/article/details/127297351
⭐️👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍🌔