目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览


2.算法运行软件版本
matlab2022a
3.部分核心程序
..........................................................................
% 单向运动法
% 单向运动法
% 加载调用函数集
clc;
addpath(genpath('原单向运动估计'));
for i = 1:Numbers - kk
fprintf('%2.2f',100*i/Numbers);
fprintf('%%');
fprintf('\n');
frame1 = double(rgb2gray(pixel(:,:,:,i)));
frame2 = double(rgb2gray(pixel(:,:,:,i+kk)));%由于原视频的采样率较高,为了防止两帧完全相同的情况,这里间隔大于1
%运动估计
%运动补偿
image_compsation = func_single_motion_estimation(frame1,frame2,BLOCK_SIZEs);
%计算PSNR
psnr(i) = func_PSNR(double(rgb2gray(pixel(:,:,:,i+kk-1))),image_compsation);
end
save PSNR_mat\psnr1.mat psnr
clear frame1 frame2 motion_Vector image_compsation psnr
%双向运动法
%双向运动法
%加载调用函数集
clc;
addpath(genpath('原双向运动估计'));
for i = 1:Numbers - kk
fprintf('%2.2f',100*i/Numbers);
fprintf('%%');
fprintf('\n');
frame1 = double(rgb2gray(pixel(:,:,:,i)));
frame2 = double(rgb2gray(pixel(:,:,:,i+kk)));%由于原视频的采样率较高,为了防止两帧完全相同的情况,这里间隔大于1
%运动估计
%运动补偿
image_compsation = func_Bi_directional_motion_estimation(frame1,frame2,BLOCK_SIZE);
%计算PSNR
psnr(i) = func_PSNR(double(rgb2gray(pixel(:,:,:,i+kk-1))),image_compsation);
end
save PSNR_mat\psnr2.mat psnr
clear frame1 frame2 motion_Vector image_compsation psnr
%改进后的双向运动法
%改进后的双向运动法
%加载调用函数集
clc;
addpath(genpath('改进后的算法'));
for i = 1:Numbers - kk
fprintf('%2.2f',100*i/Numbers);
fprintf('%%');
fprintf('\n');
frame1 = double(rgb2gray(pixel(:,:,:,i)));
frame2 = double(rgb2gray(pixel(:,:,:,i+kk)));%由于原视频的采样率较高,为了防止两帧完全相同的情况,这里间隔大于1
%运动估计
%运动补偿
image_compsation = func_advance_Bi_directional_motion_estimation(frame1,frame2,BLOCK_SIZEs,BLOCK_SIZE);
%计算PSNR
psnr(i) = func_PSNR(double(rgb2gray(pixel(:,:,:,i+kk-1))),image_compsation);
end
save PSNR_mat\psnr3.mat psnr
clear frame1 frame2 motion_Vector image_compsation psnr
%对比不同算法的PSNR性能
figure
load PSNR_mat\psnr1.mat
plot(psnr,'b-o');hold on;
load PSNR_mat\psnr2.mat
plot(psnr,'k-o');hold on;
load PSNR_mat\psnr3.mat
plot(psnr,'r-o');hold on;
xlabel('帧数');
ylabel('PSNR');
legend('单向运动估计','双向运动估计','改进后的双向运动估计');
grid on;
end
if sel == 0
%对比不同算法的PSNR性能
figure
load PSNR_mat\psnr1.mat
plot(psnr,'b-o');hold on;
load PSNR_mat\psnr2.mat
plot(psnr,'k-o');hold on;
load PSNR_mat\psnr3.mat
plot(psnr,'r-o');hold on;
xlabel('帧数');
ylabel('PSNR');
legend('单向运动估计','双向运动估计','改进后的双向运动估计');
grid on;
end
13_009m
4.算法理论概述
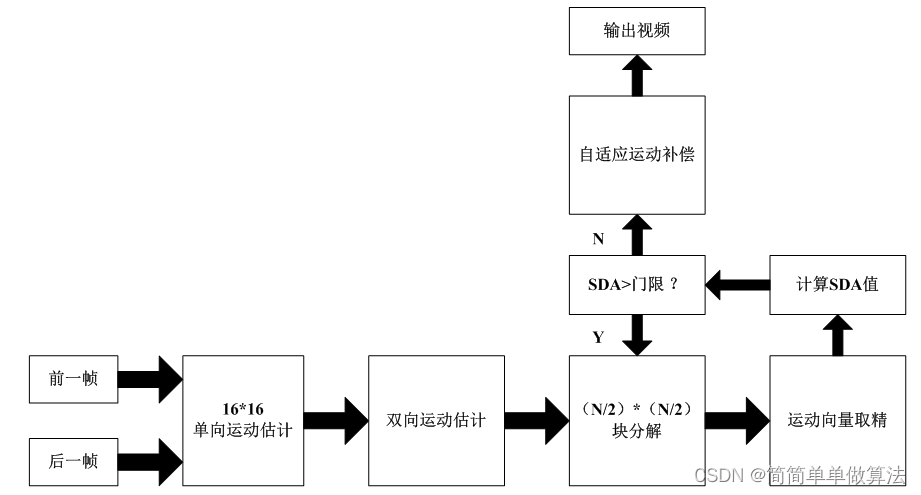
基于自适应运动补偿的双向运动估计算法是一种用于视频或图像序列中运动估计的方法。它通过估计前向运动和反向运动场来提高运动估计的精度。该算法采用自适应运动补偿的策略,对预测图像和参考图像之间的像素块进行比较,从而获得准确的运动向量。
整个算法基本结构如下:
假设我们有两幅图像,分别为预测图像P(x, y)和参考图像R(x, y)。我们的目标是找到每个像素块的运动向量(u, v),使得预测图像P通过运动向量(u, v)与参考图像R的对应像素块匹配。
该算法的数学原理涉及以下公式:
相似度度量: 使用均方误差(Mean Squared Error, MSE)或其他相似度度量函数来衡量像素块之间的差异。
运动向量计算: 对于每个像素块,通过最小化相似度度量来计算运动向量(u, v),使得P(x + u, y + v)与R(x, y)最匹配。
自适应运动补偿: 引入自适应性,根据图像内容和运动场的复杂程度,调整像素块的大小和搜索范围,以获得更精确的运动向量。
算法的实现过程可以分为以下几个步骤:
将预测图像和参考图像分成大小相同的像素块。
对于每个像素块,在参考图像中搜索与之最匹配的块,并计算运动向量(u, v)。
根据自适应策略,调整像素块的大小和搜索范围,并重新计算运动向量。
将得到的运动场进行双向一致性检查,进一步提高运动估计的准确性。
该算法在视频编码、视频压缩、运动补偿、图像稳定等领域具有广泛的应用。它可以提高视频编码的效率和质量,减少视频数据的传输带宽,改善视频稳定性和视觉感知。
在实现该算法时,可能会面临以下难点:
计算复杂度: 运动估计算法需要在图像序列中搜索匹配块,这可能导致较高的计算复杂度,特别是对于高分辨率的图像或视频。
运动一致性: 双向运动估计需要保证前向和反向运动场之间的一致性,这对算法的实现和调优提出了挑战。
自适应策略: 实现自适应运动补偿需要合理的参数设置和策略选择,以适应不同场景和图像内容的变化。
5.算法完整程序工程
OOOOO
OOO
O