前言:
之前做的carla与g29的联合调试,现在记录一下carla控制g29的实现流程。
一、总体通讯流程
主要实现为carla中车辆的方向盘转动带着g29跟着一起转动,使用ros通讯来实现这个过程。
二、具体实现流程
2.1首先确定g29的力反馈和转动
使用的是开源的方案:g29力反馈
$ cd catkin_ws/src
$ git clone https://github.com/ncnynl/ros-g29-force-feedback.git
$ cd ../
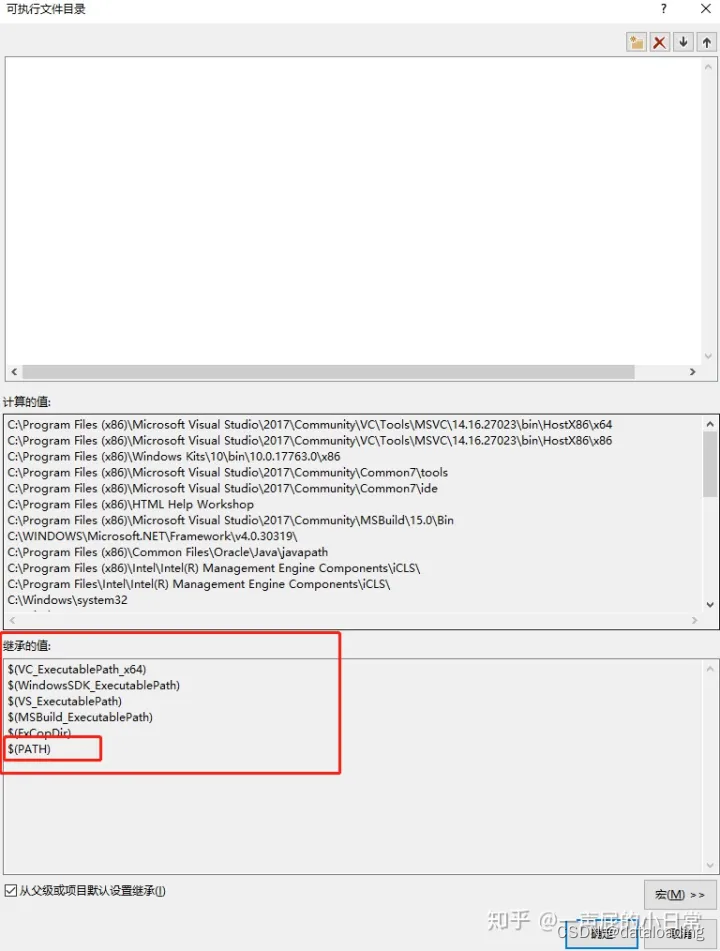
$ catkin_make编译通过后。查看打开CMakeLists.txt文件,这里的:

这里就是向g29发送控制指令的node,使用前必须现运行这个node。在运行前,需要确定g29插入usb的端口。
使用命令:
cat /proc/bus/input/devices查看g29的端口:
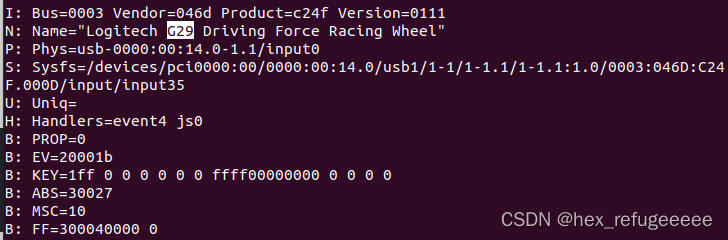
现在获取它的端口为event4 js0,分别是力反馈和方向盘转动的端口。
然后修改yaml文件,一般在config文件夹里面:

没有的话,自己创建一个。
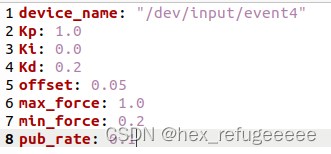
然后修改这里的device_name这里的部分。
然后将这个config写入,使用命令:
rosparam load ./src/ros-g29-force-feedback/config/g29.yaml
rosrun g29_force_feedback g29_force_feedback_node
出现下面的标志就表示g29的旋转与力反馈接口成功打开。

现在测试一下,使用命令:
source devel/setup.bash
rosrun g29_force_feedback talker.py
然后可以在talker.py里面修改相关的参数,g29msg.angle是转动的角度,g29msg.force是力反馈的力度。
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from g29_force_feedback.msg import ForceFeedback
def talker():
rospy.init_node('talker')
pub = rospy.Publisher('ff_target', ForceFeedback, queue_size=20)
# pub = rospy.Publisher('g29test', String, queue_size=20)
r = rospy.Rate(0.5)
while not rospy.is_shutdown():
# str = "angle: 0.5 force: 0.6"
g29msg = ForceFeedback()
g29msg.angle = 0
g29msg.force = 0.4
rospy.loginfo(g29msg)
pub.publish(g29msg)
#break
r.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException: pass会输出信息:
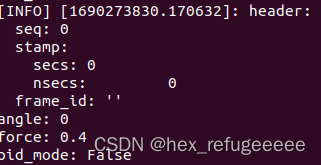
同时方向盘有转动,表示力反馈设置成功。这里的talker.py写的很清晰,就不解析了,之后也是在这个框架上简单的修改后达成carla中车辆控制g29方向盘的效果。
2.2 输出carla中车辆的转动信息
依据前面实现力反馈的包,使用ros来输出carla中车辆转动信息。需要自己根据carla中的车辆转动信息来自定义设置消息格式。我没有使用carla_ros_bridge自己写了单独的接口,具体实现参考前面写的文章:
carla和ros不通过carla_ros_bridge进行lidar发送_hex_refugeeeee的博客-CSDN博客
这里给出实现的源码:
# 将车辆设置成自动驾驶模式
import rospy
from pub_steer.msg import Carla_steer
import carla
import random
from agents.navigation.behavior_agent import BehaviorAgent
def get_steering_wheel_angle(vehicle):
# 获取车辆的方向盘信息
control = vehicle.get_control()
steering_wheel_angle = control.steer
return steering_wheel_angle
def main():
client = carla.Client('localhost', 2000)
client.set_timeout(10.0)
world = client.get_world()
origin_settings = world.get_settings()
settings = world.get_settings()
settings.synchronous_mode = True
settings.fixed_delta_seconds = 0.05
world.apply_settings(settings)
blueprint_library = world.get_blueprint_library()
try:
# 确定起点和终点
p11 = carla.Location(229, 116, 2)
p12 = carla.Location(240, 116, 2)
p21 = carla.Location(20, 194, 2)
p22 = carla.Location(20, 198, 2)
start_point1 = carla.Transform(p11, carla.Rotation(0,90,0))
end_point1 = carla.Transform(p21, carla.Rotation(0, 0, 0))
# 创建车辆
ego_vehicle_bp = blueprint_library.find('vehicle.audi.a2')
ego_vehicle_bp.set_attribute('color', '0, 0, 0')
# ROS节点初始化
rospy.init_node('carla_steer_publisher', anonymous=True)
car_info_pub = rospy.Publisher('vehicle_steer_info', Carla_steer, queue_size=10)
# 两种模式,设置成自动驾驶模式
spawn_points = world.get_map().get_spawn_points()
random.shuffle(spawn_points)
vehicle1 = world.spawn_actor(ego_vehicle_bp, spawn_points[3])
# 设置车辆的驾驶模式
agent1 = BehaviorAgent(vehicle1, behavior='normal')
if spawn_points[0].location != agent1._vehicle.get_location():
destination = spawn_points[0]
else:
destination = spawn_points[1]
agent1.set_destination(end_point1.location)
while not rospy.is_shutdown():
world.tick()
agent1._update_information()
if (len(agent1._local_planner._waypoints_queue) < 1):
random.shuffle(spawn_points)
if spawn_points[0].location != agent1._vehicle.get_location():
destination = spawn_points[0]
else:
destination = spawn_points[1]
agent1.set_destination(destination.location)
# 设置速度限制
speed_limit1 = vehicle1.get_speed_limit()
agent1.get_local_planner().set_speed(speed_limit1)
control1 = agent1.run_step(debug=True)
vehicle1.apply_control(control1)
# 获得carla中车辆的方向盘传动信息 steering_angle
steering_angle = get_steering_wheel_angle(vehicle1)
car_info_msg = Carla_steer()
car_info_msg.steer_angle = steering_angle
print("方向盘转动:", steering_angle)
car_info_pub.publish(car_info_msg)
finally:
world.apply_settings(origin_settings)
vehicle1.destroy()
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
pass
finally:
print('\ndone.')注释写的很清晰,注意使用了自定义消息类型,我写的自定义消息类型是这个,可以根据不同的需要自己写:
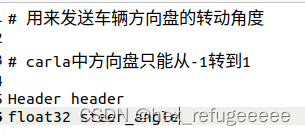
主要实现就是这些,其他的部分比较简单。
这节就将carla中车辆的转向消息通过ros自定义消息类型发送出去了,整个项目实现了2/3了。
2.3 接收carla发送的方向盘转动信息
这节就是前面提到的,根据talker.py的框架写的接收上一节中发送的方向盘转动信息。比较简单,直接给出源码。
#!/usr/bin/env python
import rospy
from g29_force_feedback.msg import Carla_steer
from g29_force_feedback.msg import ForceFeedback
pub = rospy.Publisher('ff_target', ForceFeedback, queue_size=20)
def sub_g29(data):
steer_datas = data.steer_angle
print(steer_datas)
g29msg = ForceFeedback()
g29msg.angle = steer_datas
g29msg.force = 0.4
# rospy.loginfo(g29msg)
pub.publish(g29msg)
def talker():
rospy.init_node('talker')
rospy.Subscriber('vehicle_steer_info', Carla_steer, sub_g29)
rospy.spin()
if __name__ == '__main__':
try:
talker()
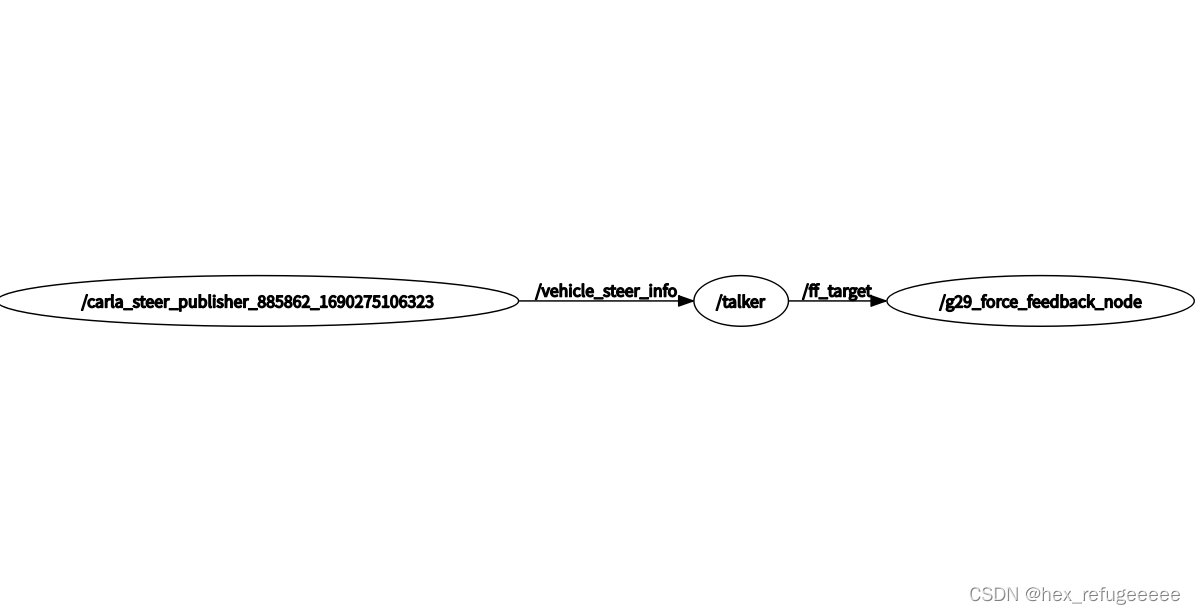
except rospy.ROSInterruptException: pass到这里基本上所有的实现就完成了,rqt:
视频效果还是比较明显的,就是力反馈的设置需要调试,使得它归零的时候会左右摇摆:
Carla中车辆反向控制g29_哔哩哔哩_bilibili


![[论文阅读笔记24]Social-STGCNN: A Social Spatio-Temporal GCNN for Human Traj. Pred.](https://img-blog.csdnimg.cn/97e4dd85d7b14e3685f06e2db9b6b213.png)