本篇文章主要介绍在安装完ROS后,在进行MATLAB与ROS联合仿真之前,需要进行的一些环境搭建以及准备工作,主要分为 创建ROS工作空间及功能包、必备功能包安装、安装Gazebo11、导入实验功能包至工作空间、安装Visual_Studio_Code(选做)、常用便捷工具安装(选做) 六部分。
本部分内容共分为上下两篇,上篇包括创建ROS工作空间及功能包和必备功能包安装这两部分,下篇包括、安装Gazebo11、导入实验功能包至工作空间、安装Visual_Studio_Code(选做)、常用便捷工具安装(选做)这四部分。

第一部分 创建ROS工作空间及功能包
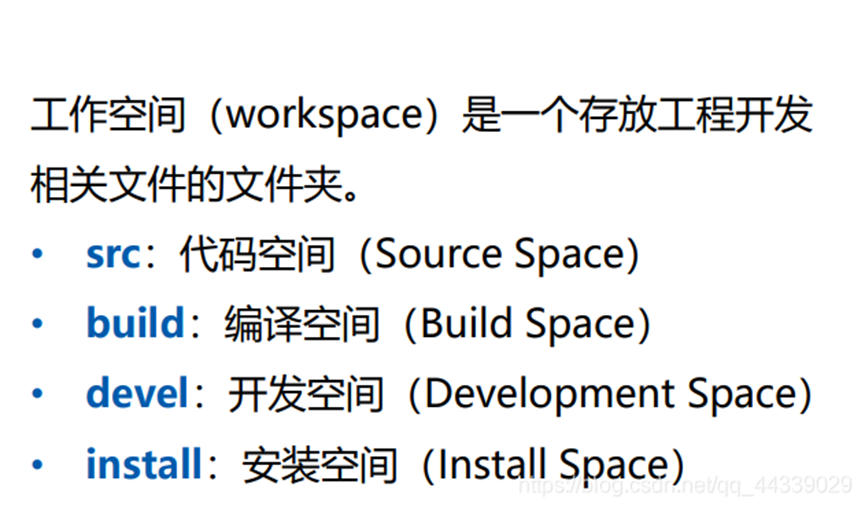
1、工作空间用来存放工程的文件,里面的src文件夹是用来存放功能包的,功能包的配置文件等,build文件夹用来存放编译过程中产生的一些中间文件,devel文件夹存放编译生成的一些可执行文件,一些库,一些脚本等,install文件夹主要用来存放安装的一些文件。
2、创建工作空间:
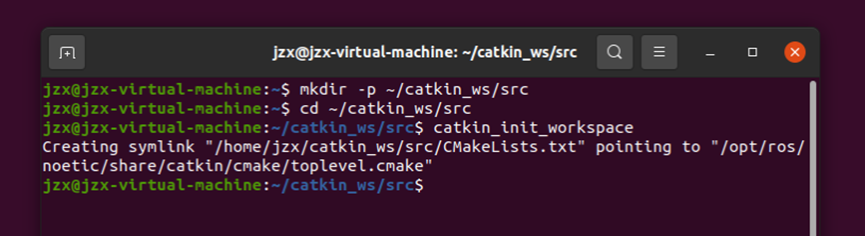
(1)在主文件夹下用mkdir命令创建一个子文件夹,取名为catkin_ws ,这个名字是可以自己起的(为后续代码移植方便,建议不要修改名字),后面的src是不能变的,接下来要利用命令cd进入到该文件夹下,然后用catkin_init_workspace命令将该文件夹变为ros工作空间的属性
初次接触时,也许你并不理解以上这段话,你只需要按顺序执行下面三条指令就可以了
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
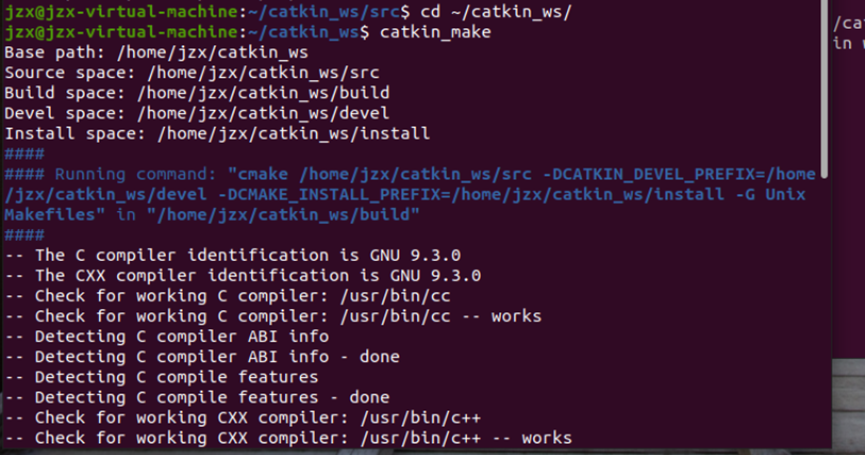
(2)创建完工作空间后,要对工作空间进行编译,编译时需要在工作空间的根目录下进行编译,也就是我们需要先进入catkin_ws文件夹下,再利用catkin_make命令对其进行编译,这个命令会编译src下面所有功能包的源码,并将结果放到devel文件夹下,编译后生成了build和devel这两个文件夹,这个命令不能生成install文件夹,需要用catkin_make install命令来生成install文件夹
以上这段话,同样对应三条指令,只需要按顺序执行下面三条指令就可以了
cd ~/catkin_ws/
catkin_make
catkin_make install
(3)为了让系统找到我们的工作空间,还需要设置环境变量,执行以下语句:
source devel/setup.bash
(4)设置环境变量之后,输入以下指令去检查一下
echo $ROS_PACKAGE_PATH
3、到这里工作空间就创建完成了,为方便后续的开发,这里可以多做一步操作,当我们改变工作空间里的内容之后,都需要使用catkin_make命令来编译,编译完成后接下来就是利用命令source devel/setup.bash去设置环境变量,为了不在每次运行时都去设置环境变量,可以将该语句添加到主文件下的.bashrc文件中,该文件是隐藏文件,在主文件夹下,需要按ctrl+h才能显示出来,打开后,在最后添加source devel/setup.bash ,添加时候需要修改一下路径改成该工作空间下的路径,比如我应该添加的是source /home/jzx/catkin_ws/devel/ setup.bash 重新启动终端生效,有了这一步操作后,就不用每次都运行source devel/setup.bash了,而且可以在任意路径下运行rosrun命令
4、创建功能包(选做)
在创建代码的时候一定要创建一个功能包,功能包是ROS里面放置源码的最小单元,所有的源码必须放到功能包下面,不允许直接放在src文件夹下,用catkin_create_pkg命令创建功能包,后面跟的第一个参数是功能包的名字,后面的参数是这个功能包的依赖,也就是这个功能包需要用到ros里面的那些其他的功能包,因为要用c++编程所以要添加依赖roscpp,因为要用Python编程,所以要添加依赖rospy ,标准的消息结构std_msgs ,创建的功能包要放在src文件夹下,添加完功能包后,我们返回到catkin_ws目录下,再对工作空间进行编译,就会把刚才添加的功能包也编译了。只有设置了环境变量后才能让系统找到我们的工作空间 ,用命令echo $ROS_PACKAGE_PATH来检查我们创建的环境变量
上面那段话是帮助大家理解的,操作的的话,只需要按顺序输入以下指令就可以了(功能包的名字可以任取)
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs rospy roscpp
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
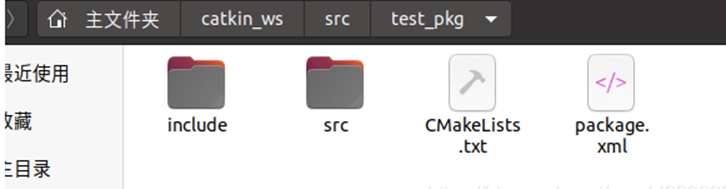
在创建的功能包test_pkg中有一个src文件夹,用来放置功能包的代码,比如cpp文件等,include文件夹可以用来存放头文件,另外两个文件是每个功能包必须存在的两个文件,这两个文件的存在才标志着,这个文件夹是一个功能包,而不是普通文件夹
第二部分 必备功能包安装
1、安装JAVA环境:
(1)输入以下指令安装JAVA环境:
sudo apt update
sudo apt install openjdk-11-jdk
(2)如果你需要安装其他版本的,将上面的版本11改成对应的数字就行了,比如说版本8,就改为sudo apt install openjdk-8-jdk 指令java -version可以查看 Java 版本
(3)以下指令可以查看JAVA的安装路径
sudo update-alternatives --config java
(4)通过下面第一条指令,可以打开环境设置文件,在文件的最后添加下面的第二条指令,可以设置 JAVA_HOME 指定到 OpenJDK 11
sudo nano /etc/environment
JAVA_HOME="/usr/lib/jvm/java-11-openjdk-amd64"
(5)执行以下指令使其生效
source /etc/environment
2、安装32位运行库:
输入以下指令,安装:
sudo apt-get install lib32z1
3、安装effort_controllers
输入以下指令,安装:
sudo apt-get install ros-noetic-effort-controllers
4、安装python3.8
(1)可运行以下指令安装 :
sudo apt-get install python3.8
(2) 设置软连接,依次输入以下指令进行设置
whereis python3.8
cd /usr/bin
sudo ln -s /usr/bin/python3.8 python
5、安装ackermann-msgs
可运行以下指令安装 :
sudo apt install ros-noetic-ackermann-msgs
6、安装net-tools
可运行以下指令安装 :
sudo apt install net-tools
7、安装 map-server功能包
可运行以下指令安装 :
sudo apt-get install ros-noetic-map-server
8、安装teb_local_planner功能包
可运行以下指令安装 :
sudo apt install ros-noetic-teb-local-planner
sudo apt install ros-noetic-teb-local-planner-dbgsym
9、安装move-base功能包
可运行以下指令安装 :
sudo apt install ros-noetic-move-base
10、安装navigation功能包
可运行以下指令安装 :
sudo apt install ros-noetic-navigation
11、安装gmapping功能包
roslaunch bringup slam_gmapping.launch
![[论文阅读笔记24]Social-STGCNN: A Social Spatio-Temporal GCNN for Human Traj. Pred.](https://img-blog.csdnimg.cn/97e4dd85d7b14e3685f06e2db9b6b213.png)