目录
一、加载视频
二、去除背景
三、通过形态学识别车辆
四、对车辆统计
一、加载视频
代码如下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 视频加载
cap = cv2.VideoCapture('2.mp4')
# 循环读取视频帧
while True:
ret,frame = cap.read()
if ret == True:
cv2.imshow('video',frame)
key = cv2.waitKey(1)
# 用户按esc退出
if key == 27:
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
二、去除背景
背景减除(Background Subtraction)是许多基于计算机视觉的任务中的主要预处理步骤,如果我们有完整的静止的背景帧,那么我们可以通过帧差法来计算像素差从而获得到前景对象。
但是在大多数情况下,我们可能没有这样的图像,所以我们需要从我们拥有的任何图像中提取背景。当运动物体有阴影时,由于阴影也在运动,情况会变的更加复杂,为此引入了背景减除法,通过这一方法我们能够从视频中分离出运动的物体前景,从而达到目标检测的目的。
cv2.BackgroundSubtractorMOG2()用法:
- 这是一个以混合高斯模型为基础的前景/背景分割算法。它是 P.KadewTraKuPong 和 R.Bowden 在2001年提出的。
- 它使用 K(K = 3 或 5)个高斯分布混合对背景像素进行建模。使用这些颜色(在整个视频中)存在时间的长短作为混合的权重。背景的颜色一般持续的时间最长,而且更加静止。
- 在编写代码时,我们需要使用函数:mog = cv2.bgsegm.createBackgroundSubtractorMOG() 创建一个背景对象。
- 这个函数有些可选参数,比如要进行建模场景的时间长度,高斯混合成分的数量,阈值等。将它们全部设置为默认值,然后在整个视频中我们是需要使用 mask = mog.apply(frame) 就可以得到前景的掩膜了。
- 移动的物体会被标记为白色,背景会被标记为黑色的。
代码如下:
cap = cv2.VideoCapture('video.mp4')
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
while True:
ret, frame = cap.read()
if(ret == True):
# 灰度处理
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 高斯去噪
blur = cv2.GaussianBlur(frame, (3, 3), 5)
mask = bgsubmog.apply(blur)
cv2.imshow('video', mask)
key = cv2.waitKey(1)
if(key == 27): # Esc退出
break
cap.release()
cv2.destroyAllWindows()

三、通过形态学识别车辆
代码如下:
cap = cv2.VideoCapture('video.mp4')
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
# 形态学kernel
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
while True:
ret, frame = cap.read()
if(ret == True):
# 灰度处理
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 高斯去噪
blur = cv2.GaussianBlur(frame, (3, 3), 5)
mask = bgsubmog.apply(blur)
# 腐蚀
erode = cv2.erode(mask, kernel)
# 膨胀
dilate = cv2.dilate(erode, kernel, 3)
# 闭操作
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
close = cv2.morphologyEx(close, cv2.MORPH_CLOSE, kernel)
contours, h = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE,)
for (i, c) in enumerate(contours):
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x+w, y+h), (0,0,255), 2)
cv2.imshow('video', frame)
key = cv2.waitKey(1)
if(key == 27): # Esc退出
break
cap.release()
cv2.destroyAllWindows()
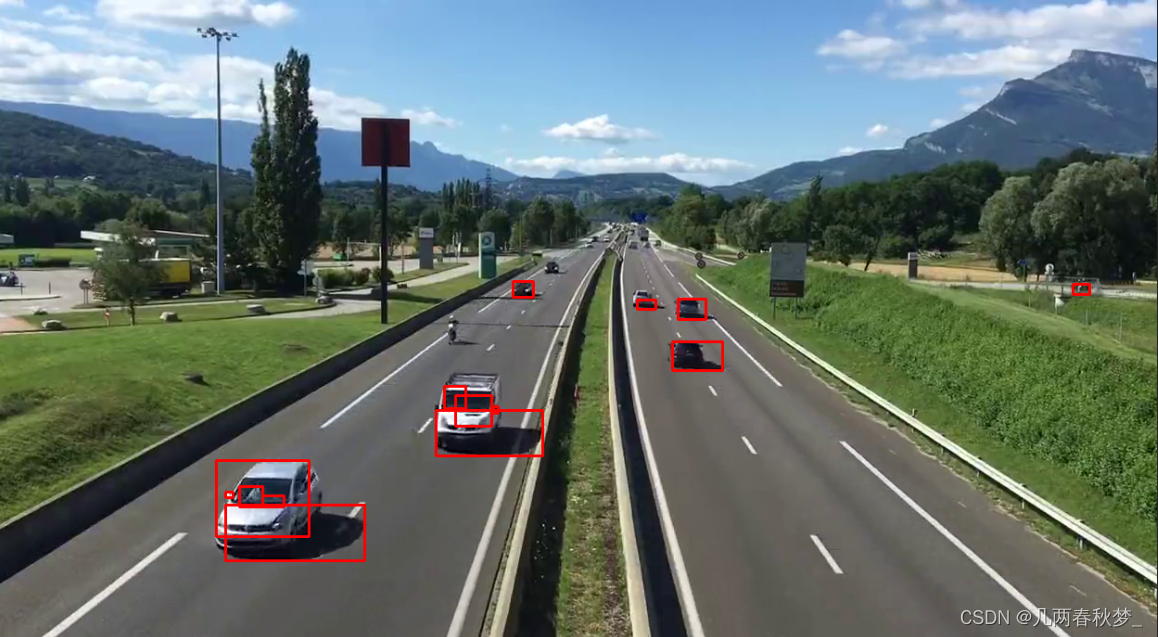
根据图中效果来看,会出现很多小的检测框,接下来就是处理重合检测框以及去掉一些多余的检测框,类似于去重
四、对车辆统计
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 去除背景
cap = cv2.VideoCapture('2.mp4')
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(5,5))
min_w = 90
min_h = 90
line_high = 600
# 设置一个偏移量
offset = 7
cars = []
# 车的数量
car_num = 0
# 计算外接矩形的中心点
def center(x,y,w,h):
x1 = int(w/2)
y1 = int(h/2)
cx = int(x) + x1
cy = int(y) + y1
return cx,cy
while True:
ret, frame = cap.read()
if (ret == True):
# 灰度处理
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 高斯去噪
blur = cv2.GaussianBlur(gray, (3, 3), 5)
mask = bgsubmog.apply(blur)
# cv2.imshow('video', mask)
#腐蚀操作
erode = cv2.erode(mask,kernel)
# 膨胀
dialte = cv2.dilate(erode,kernel,iterations=2)
# 消除内部方块
# 闭运算(先膨胀再腐蚀)
close = cv2.morphologyEx(dialte,cv2.MORPH_CLOSE,kernel)
#查找轮廓
result,contours,h = cv2.findContours(close,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# 画出检测线
cv2.line(frame,(10,line_high),(1200,line_high),(255,255,0),3)
#画出所有检测的轮廓
for contour in contours:
#画出最大外接矩形
(x,y,w,h) = cv2.boundingRect(contour)
# 判断外接矩形的宽高大小来过滤掉小矩形
is_valid = (w >= min_w) & (h >= min_h)
if not is_valid:
continue
#代码能走到这表示是符合要求的车
# 要求坐标点都是整数
# 画出矩形
cv2.rectangle(frame,(int(x),int(y)),(int(x+w),int(y+h)),(0,0,255),2)
# 把车抽象为一点,即外接矩形的中心点
cpoint = center(x,y,w,h)
cars.append(cpoint)
cv2.circle(frame,(cpoint),5,(0,0,255),-1)
# 判断汽车是否过检测线
for (x,y) in cars:
if y > (line_high - offset) and y < (line_high + offset):
#落入有效区间
#计数+1
car_num+=1
cars.remove((x,y))
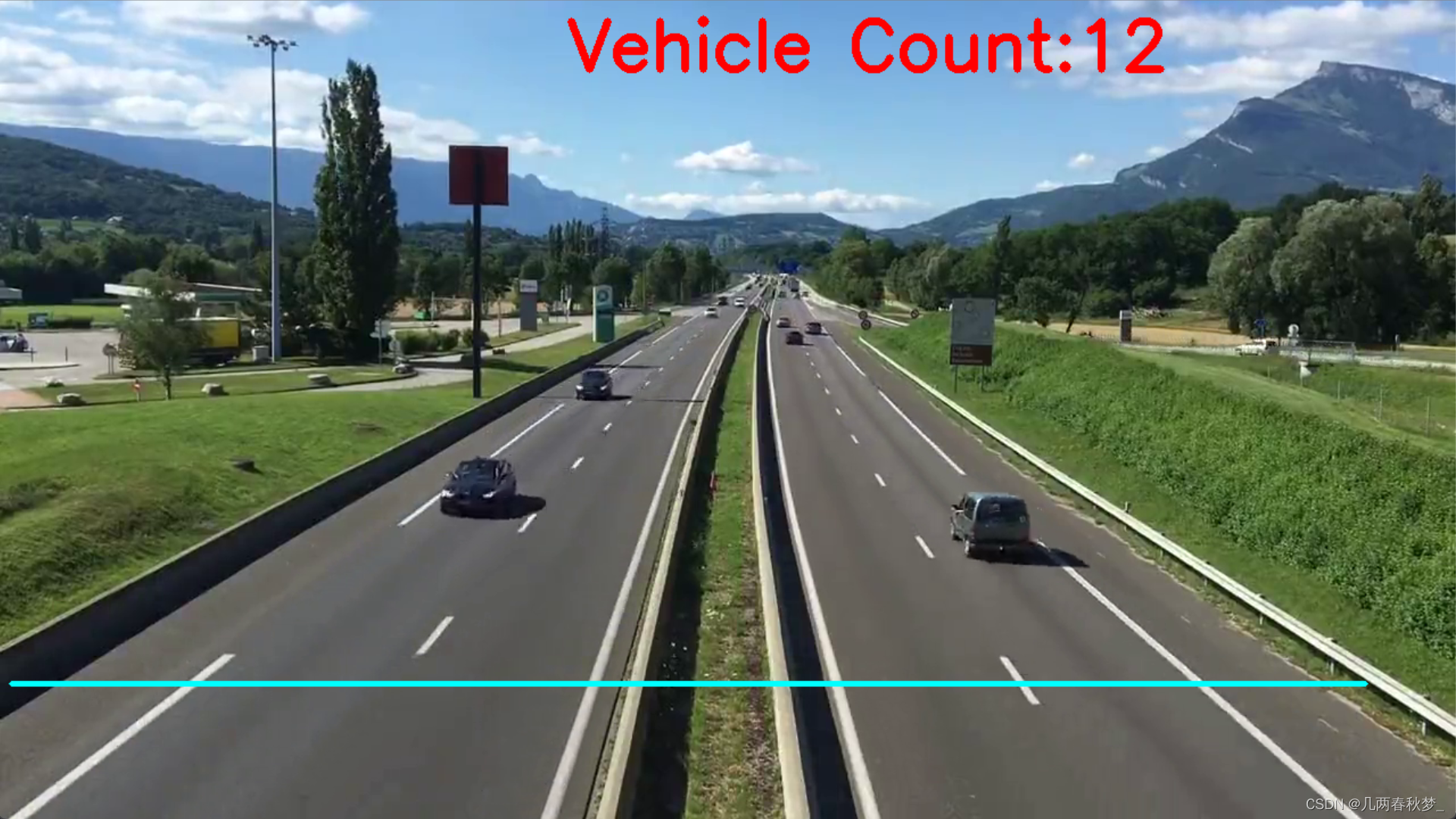
cv2.putText(frame,'Vehicle Count:' + str(car_num),(500,60),cv2.FONT_HERSHEY_SIMPLEX,2,(0,0,255),5)
cv2.imshow('frame',frame)
key = cv2.waitKey(1)
if (key == 27): # Esc退出
break
# 释放资源
cap.release()
cv2.destroyAllWindows()运行结果如下: