1. BN层原理
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True,device=None,dtype=None)
-
为什么用BN?
加速训练。之前训练慢是因为在训练过程中,整体分布逐渐往非线性函数的取值区间的上下限端靠近(参考sigmoid函数,大的正值或负值),链式求导导致低层的神经网络梯度消失。BN就是将越来越偏的分布强行拉回(标准)正态分布,使得激活值落在非线性函数对输入比较敏感的区域,这样输入小的变化就会导致损失函数较大变化,让梯度变大,避免梯度消失问题。 -
为什么要给BN的分布乘以可学习参数 γ \gamma γ和 β \beta β?
如果强行归一化为标准正态分布,则之前该层学习到的分布也丢失信息。引入这两个重构参数,来使得我们的网络中可以学习恢复出原始网络要学习的特征分布. -
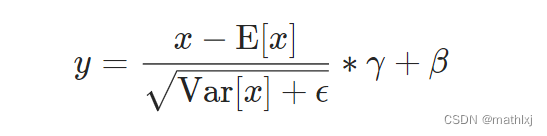
公式(torch):
y = x − E [ x ] V a r [ x ] + ϵ × γ + β y = \frac{x-E[x]}{\sqrt{Var[x]+\epsilon}}\times \gamma + \beta y=Var[x]+ϵx−E[x]×γ+β
-
反向传播.
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-k6uCO3wH-1689670017182)(:/b9265fb96a1348ee97121a7aba9a92be)]](https://img-blog.csdnimg.cn/cdd81a6fc10e49769e9bd6f0e45eda01.png)
-
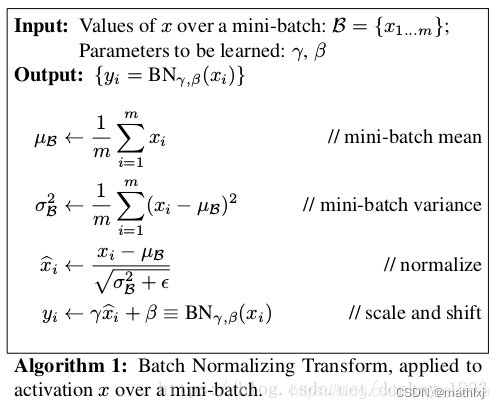
均值和方差是在mini-batch的每一个维度上分别计算的
-
因为是再 C C C维上做的BN,在 ( N , H , W ) (N,H,W) (N,H,W) slices, 也就是 计算(N,H,W) 的均值和方差, 因此学术上称为Spatial Batch Normalization.
-
γ \gamma γ和 β \beta β是可学习的参数,尺寸等于input size. 默认 γ \gamma γ设置为1, β \beta β设置为0.
-
标准差是有篇估计, 跟
torch.var(input, unbiased=False)相同. 1 m \frac{1}{m} m1 -
训练时, 运行一个计算均值和方差的估计器, 然后再验证阶段做归一化.
-
推断阶段:
- γ \gamma γ, β \beta β直接用训练好的.
- 使用均值与方差的无偏估计. 即统计训练中每一个batch的每个维度的均值和方差,然后计算在训练集上的期望:
E [ x ] ← E B [ μ B ] E[x]\leftarrow E_\mathcal{B}[\mu_\mathcal{B}] E[x]←EB[μB]
V a r [ x ] ← m m − 1 E B [ σ B 2 ] Var[x] \leftarrow \frac{m}{m-1}E_\mathcal{B}[\sigma_\mathcal{B}^2] Var[x]←m−1mEB[σB2]
最终(只是将均值和方差替换,推导一小步即可):
y = γ V a r [ x ] + ϵ x + ( β − γ E [ x ] V a r [ x ] + ϵ ) y = \frac{\gamma}{\sqrt{Var[x]+\epsilon}}x+(\beta-\frac{\gamma E[x]}{\sqrt{Var[x]+\epsilon}}) y=Var[x]+ϵγx+(β−Var[x]+ϵγE[x])
-
BN优点汇总:
-
- 大大提升训练速度,加快收敛
-
- 提高网络泛化能力,解释是类似于dropout的一种防止过拟合的正则化表达方法,可舍弃dropout
-
- 调参简单,对初始化要求没那么高,可以加大学习率
-
- 可以打乱样本训练顺序. 可以提高精度
-
- BN本质上是一个归一化网络层,可以替代局部响应归一化层(LRN)层
-
-
为什么BN层一般用在线性层和卷积层后面,而不是放在非线性单元后?
因为非线性单元的输出分布形状会在训练过程中变化,归一化无法消除他的方差偏移,相反的,全连接和卷积层的输出一般是一个对称,非稀疏的一个分布,更加类似高斯分布,对他们进行归一化会产生更加稳定的分布。其实想想也是的,像relu这样的激活函数,如果你输入的数据是一个高斯分布,经过他变换出来的数据能是一个什么形状?小于0的被抑制了,也就是分布小于0的部分直接变成0了,这样不是很高斯了。 -
缺点:
需要一个足够大的批量,小的批量会导致对批统计数据的不准确性提高,显著增加模型错误率。即BN收到batch影响很大. 例如检测和分割任务.
2. LayerNorm原理(LN)
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
-
公式:
-
均值和方差的计算与BN相似,只是维度由
normalized_shape决定,例如为(3,5),则在最后两个维度.

-
一个图像的例子,在C,H,W上做归一化
在CV中,沿着 ( C , H , W ) (C,H,W) (C,H,W)做归一化.
3. Instance Normlization (IN)和 Group Normalization (GN)
- IN: 沿着 ( H , W ) (H, W) (H,W)轴计算,每个样本单独计算,每个channel单独计算
- GN: 对channel分组进行计算, C/G为每组的通道数,沿着
(
X
/
G
,
H
,
W
)
(X/G, H, W)
(X/G,H,W)来计算
- 当G=1时,变成了LN。GN比LN受限制更少,因为假设每组通道(而不是所有通道)都受共享均值和方差的影响; 该模型仍然具有为每个群体学习不同分布的灵活性。这导致GN相对于LN的代表能力提高。
- 当G=C时,变成了GN. 但是IN只能依靠空间维度来计算均值和方差,并且错过了利用信道依赖的机会。
4. 汇总
- BN: 在batch方向做归一化,计算 N ∗ H ∗ W N*H*W N∗H∗W的均值
- LN: 在channel方向做归一化, 计算 C ∗ H ∗ W C*H*W C∗H∗W的均值
- IN: 在一个channel内做归一化, 计算 H ∗ W H*W H∗W的均值
- GN: 先将channel方向分group,然后每个group内做归一化,计算 ( C / / G ) ∗ H ∗ W (C//G)*H*W (C//G)∗H∗W的均值