1.3.7 AEB 系统功能定义
1.3.7.1 车辆(纵向)AEB 系统
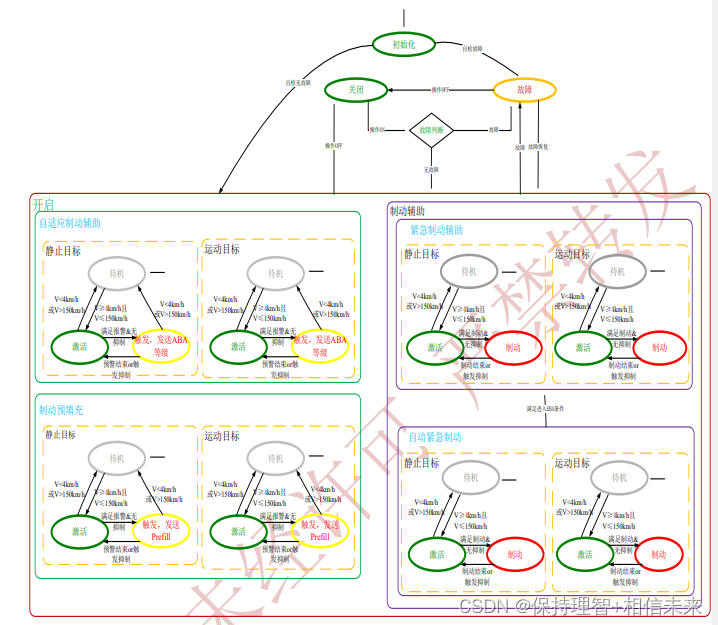
1.3.7.1.1 状态机
1)前碰撞预警系统状态机
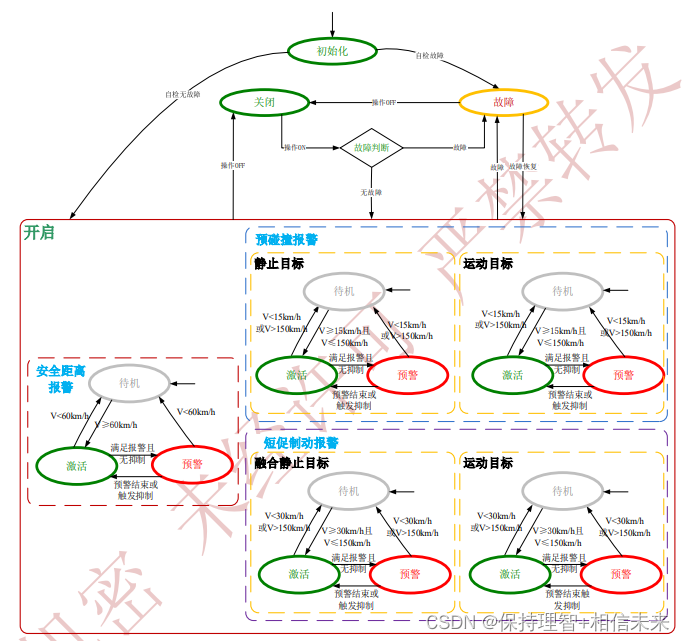
2)AEB 功能状态机(Prefill、ABA、制动辅助为并行关系)
1.3.7.1.2 信号需求列表
1.3.7.1.3 系统开启关闭
1)初始化
车辆上电后,前向毫米波雷达进行初始化,控制器需要在上电后 220ms 内发出第一帧报文,并在 3s 内完成内部自检,同时上电 3s 内不进行关联系统检测(上电 3s 内不报关联系统故障、不记录关联系统故障码)。
AEB 系统内部自检:自检过程中,AEB 系统状态为开启状态(ACC_AEBStatus=0x1:on),自检完成后,如果检测到前向毫米波雷达故障,导致无法支持 AEB 功能,则发送 AEB 系统状态为失效状态(ACC_AEBStatus =0x3:Failure)、 ACC_AEBTextInfo 信号置为相应提示信息状态,仪表根据系统状态进行显示。自检完无故障时,系统保持开启状态。
AEB 关联系统检测:AEB 系统上电 3s 后,检测关联系统是否满足 AEB 功能正常工作要求,当关联系统相关功能异常时,则根据降级策略将 AEB 系统状态为失效状态(ACC_AEBStatus: Failure)且 ACC_AEBTextInfo 信号置为相应提示信息状态,仪表根据系统状态进行显示。
2)系统开启关闭
AEB 系统初始化完成后,系统默认为开启状态。
AEB 系统分为前碰撞预警功能和 AEB 功能两个部分,前碰撞预警功能(FCW)包含安全距离报警、预碰撞报警和短促制动报警。AEB 功能包含制动预填充(Prefill)、自适应辅助(ABA)、紧急制动辅助(EBA)、自动紧急制动。上述所有单个功能都可以通过诊断单独配置为开启/关闭,且配置开启前一直处于 OFF 状态,无法切换到开启状态。
前碰撞预警功能的开启、关闭及灵敏度设置均通过 HU 软开关设置。FCW 每次上电默认开启,其灵敏度由系统做记忆(出厂无记忆值时默认为 normal),具体设置逻辑如下:
a. 每次上电后,系统自动将 ACC_FCWSettingStatus 置为记忆的灵敏度值发出,HU 收到该信号后显示对应的 FCW 设置状态;
b. 系统上电初始化完成后,即可响应用户的设置需求:驾驶员通过 HU“前碰撞预警”软开关设置 FCW 功能时,HU 将事件型信号“HU_FCWSetting”置为相应值(0x0:Early;0x1:Normal;0x2:Late;0x3: Off ),并通过网关转发给 ACC 。 ACC收到该信号并完成灵敏度切换后,将周期性信号 “ACC_FCWSettingStatus”置为对应值(0x0:Early;0x1:Normal;0x2:Late;0x3:Off),并通过网关转发给 HU。HU 收到“ACC_FCWSettingStatus”信号后,将 UI 界面“前碰撞预警”软开关置为对应状态。
c. 系统接收到“HU_FCWSetting”为 Invalid、Inactive 或 reserved 时,不做任何处理,维持之前状态不变。
d. 系统处于故障状态(非控制器硬件、通讯等故障,如关联系统故障导致的故障等)下,也能响应设置需求。用户开启系统时,若系统存在故障则跳转到故障状态,ACC_FCWSettingStatus 信号处理逻辑 (‘b.’)不受系统状态影响。故障恢复后,应根据用户最新设置的 FCW 设置状态切换到相应的状态(关闭 或 early、normal、late)。
AEB 功能的开启、关闭通过 HU 软开关设置。AEB 每次上电默认开启,具体设置逻辑如下:
a. 每次上电后,系统置为开启状态并将 ACC_AEBStatus 置为 0x1:on,同时将 ACC_AEBEnable 置为开启状态 (0x1=on),HU 收到 ACC_AEBEnable 信号后显示 AEB 为开启状态;
b. 系统上电初始化完成后,即可响应用户的设置需求:驾驶员通过 HU“自动紧急制动”软开关设置 AEB 功能时,HU 将事件型信号“HU_AutoBrakeEnable”置为相应值(0x0:OFF;0x1:on;),并通过网关转发给 ACC。ACC 收到该信号并完成状态切换后,将周期性信号 “ACC_AEBEnable” (0x0:OFF;0x1:on;)置 为对应值,并通过网关转发给 HU。HU 收到“ACC_AEBEnable”信号后,将 UI 界面“自动紧急制动”软开关置为对应状态。
c. 系统接收到 HU_AutoBrakeEnable 信号为 Invalid、Inactive 或 reserved 时,不做任何处理,维持之前状态不变。
d. 系统处于故障状态(非控制器硬件、通讯等故障,如关联系统故障导致的故障等)下,也能响应设置需求。用户开启系统时,若系统存在故障则跳转到故障状态,ACC_AEBEnable 信号处理逻辑(‘b.’)不受系统状态影响。
1.3.7.1.4 制动预填充
制动系统的预填充的目的是实现更快的制动反应。制动系统中,制动片与制动盘二者间存在间隙,以防止制动片过早的磨损,此间隙的存在导致在紧急制动时二者接触将花费时间,影响到系统的制动距离。制动预填充即将制动片移动到制动盘但并不施加制动力,为制动请求提供更快的反应。
AEB系统检测到需要执行强力制动避免危险的情况下,AEB系统将请求制动系统进行预填充,发出预填充信号 “ACC_PrefillActive”为填充状态发送给ESP,ESP接收到此信号后将制动片与制动盘之间的距离调整为最小,为接收到预警辅助制动系统发出制动命令或者驾驶员踩下制动踏板后能更快的执行相关的动作而做好制动准备。制动预填充需尽可能快的执行和停止,在制动预填充过程中,车辆无明显(驾驶员可感知到的)减速;在制动预填充过程中,没有可被驾驶员察觉的制动噪音;预填充减小响应时间需要大于50ms。
(1)制动预填充对静止目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:静止目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:静止目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
(2)制动预填充对运动目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:运动目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:运动目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
1.3.7.1.5 自适应辅助制动
AEB系统向制动系统提供可靠的前方近距的潜在碰撞风险信息,自适应制动辅助(Adaptive brake assist, ABA)发出自适应制动级别信号“ACC_ABAlevel”为相应的等级信号、ACC_ABAActive为激活状态给ESP,要求ESP提高液压制动辅助(HBA)的门限(当满足如下条件时HBA的阈值将作出调整:当出现潜在危险时,提高HBA触发的敏感度至中度敏感。当危险程度加剧时,提高HBA触发的敏感度至高度敏感),在此期间,如果驾驶员踩下制动且主缸压力达到相 应的门限值时,ESP制动系统介入工作并提供紧急制动辅助功能(EBA);此时ESP需要提供全力制动所能提供的最大减速度值,EBA能够提供的最大减速度为车辆最大减速度(取决于ESP及整车制动性能);当驾驶员释放制动踏板,HBA将退出。
(1)自适应制动辅助对静止目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:静止目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:静止目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
(2)自适应制动辅助对运动目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:运动目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:运动目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
1.3.7.1.6 预碰撞报警
前碰撞预警功能检测到危险时,发出预碰撞报警信号“ACC_FCWActive”为报警激活状态,同时发出预测碰撞报警信号“ACC_FCWPreWarning”为报警状态,仪表接收到此信号后进行报警,发送ACC_Voiceinfo为FCW/AEB voice给仪表或AMP进行声音报警(报警频率8Hz,至少响1s)。当没有碰撞危险时,“ACC_FCWActive”、 “ACC_FCWPreWarning”、“ACC_Voiceinfo”均为不报警状态。
FCW报警-预碰撞报警:
* 对静止目标起作用的速度范围15-150km/h(可标定),静止目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
* 对运动目标起作用的速度范围15-150km/h(可标定),运动目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
前碰撞预警功能需要针对不同类型的车辆采取不同的报警时机,卡车、大巴车、货车等预警功能相对于其他车辆预警时间提前30%(待标定):
* 针对融合系统,摄像头识别出的卡车、大巴车、货车等直接提前预警,摄像头未识别出分类的物体,根据雷达聚合后的尺寸,宽度>2.5m,长度>5m的物体视为卡车,提前预警。
* 单雷达系统,根据雷达聚合后的尺寸,宽度>2.5m,长度>5m的物体视为卡车,提前预警。
1.3.7.1.7 短促制动报警
碰撞危险升级后,前碰撞预警功能会触发更高一级别的报警,即紧急碰撞报警,采取的形式为短促制动(brake jerk),也称为制动托拽警告或刹车脉冲,即通过ESP触发短促但有力的制动,更进一步的提醒驾驶员采取制动措施。 在此过程中,预碰撞报警信息持续发出,预警辅助制动系统发出自动警告制动级别“ACC_AWBlevel”为相应的等级 (制动的力度及点刹的频率),以及自动警告制动请求信号“ACC_AWBActive”为激活状态给ESP,ESP接收到此信号后进行相应的点刹报警,IP接收到此信号后进行图片报警,预警辅助制动系统发送ACC_Voiceinfo为FCW/AEB voice给仪表或AMP进行声音报警(报警频率8Hz,至少响1s)。
对于短促制动的要求为短促制动须足够强烈,以尽可能快的提醒驾驶员。短促制动的强度和持续时间由制动系统进行控制;短促制动作为一种报警方式通常会被驾驶员察觉,而不受速度或其他先决条件的影响,该制动的执行是否正确将由制动系统进行监测;制动系统必须保证车辆的稳定性,车辆的稳定性具有最高的优先级。制动系统须始终保障车辆的行驶安全。如果在短促制动过程中,需要进行更高优先级的制动(如ESP,ABS制动),该功能将退出;在预碰撞预警后,如果危险程度降低或驾驶员通过自身驾驶行为降低了危险的程度,制动系统需要在短时间内退出短促制动。短促制动车速减少不超过5km/h。
(1)短促制动紧急报警对静止目标起作用的速度范围30km/h~150km/h(可标定):
* 针对单雷达:静止目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:静止目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
(2)短促制动紧急报警对运动目标起作用的速度范围30km/h~150km/h(可标定):
* 针对单雷达:运动目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:运动目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
1.3.7.1.8 紧急制动辅助
紧急制动辅助(EBA)是指,当系统判断存在碰撞危险时,驾驶员踩下了制动踏板但踩得不够,EBA会提供辅助制动。满足如下任一条件时,EBA 激活,发送ACC_AEBCtrlType为EBA,同时发送AEB的目标减速度 ACC_AEBTargetDeceleration为最大值,AEB请求ACC_AEBActive为激活给ESP,同时反馈执行的结果ESP_AEBdecActive给 AEB系统。
1、条件一:以下为且的关系
1) EBA处于开启状态(诊断、HMI开关均开启,且无故障);
2) “车速信号”在EBA工作速度范围内;
3) 碰撞危险等级大于标定阈值;
4) 无EBA抑制条件;
5) “制动踏板状态”信号为:踩下;
6) “制动主缸压力信号”>3bar(可标定);
7) “纵向加速度”信号<-2.2m/s2 (可标定);
8) 本车“纵向加速度”在平行于行驶方向的分量小于查表阈值。
2、条件二:以下为且的关系
1) EBA处于开启状态(诊断、HMI开关均开启,且无故障);
2) “车速信号”在EBA工作速度范围内;
3) 针对本次碰撞危险的目标触发过预碰撞报警;
4) 碰撞危险等级大于标定阈值;
5) 无EBA抑制条件;
6) “制动踏板状态”信号为:踩下;
7) “制动主缸压力信号”>20bar(可标定);
8) 本车“纵向加速度”在平行于行驶方向的分量小于-2m/s2 (可标定);
9) “制动主缸压力信号”增长斜率>800bar/s。
紧急制动辅助对静止目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:静止目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:静止目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
紧急制动辅助对运动目标起作用的速度范围4-150km/h(可标定):
* 针对单雷达:运动目标包含普通轿车,卡车,特种车辆、三轮车;
* 针对单摄像头和融合:运动目标包含普通轿车、卡车、特种车辆、三轮车、自行车、摩托车、电瓶车、平衡车、高度超过30cm*长度超过30cm的物体、行人、骑行者。
EBA触发后不会因为车速超过工作速度范围而退出。