-a, --align alignment with Umeyama's method (no scale) 。将estimated poses 向 GT poses 做SE(3)变换,即一个旋转跟平移, 注意没有 scale。使得estimated poses尽量向GT poses对齐。
-s, --correct_scale correct scale with Umeyama's method ,scale 专门在这里解决。
--align_origin align the trajectory origin to the origin of the reference trajectory 。 将estimated poses 向 GT poses 对齐原点。
--n_to_align N_TO_ALIGN the number of poses to use for Umeyama alignment, counted from the start (default: all)
补充
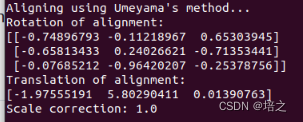
-va is a shortcut for -v -a, which is again a shortcut for --verbose --align,使用 -v 会给出更多的信息。比如,如果使用 -a 命令,加上 -v 命令,会给出用来对齐 estimated pose 与 GT pose 的 旋转矩阵与平移向量。
1. 引言
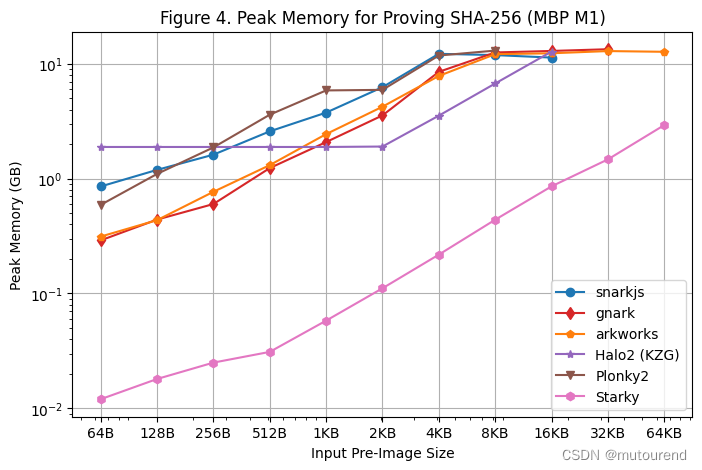
2023年7月17日zkSync官方twitter Say hello to Boojum宣称在不regenesis的情况下,将zkSync Era迁移至Boojum证明系统。
Boojum为STARK证明系统(PlonkFRI),开源代码见:
https://github.com/matter-labs/era-…




![Dubbo框架保姆级教学[手把手教会你]](https://img-blog.csdnimg.cn/30d0328d92914460b05924e65c85f3dc.png)