KUKA机器人_外部安全条件不满足时,如何操作机器人的方法
news2026/2/12 22:48:25




本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/762217.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

驾驶证——科目一笔记(二)
知识点1:通行规定
有加速(x)
各种礼让(√)
减速慢行、减速靠右、减速或停车、停车避让(√)
不用减速慢行、无需减速、不必减速(x)
不得(√) …
【文档模板】产品故障分析报告
今天和大家分享产品故障分析报告的文档模板。产品故障分析报告是一份文件,通常由技术团队、工程师或相关专业人员编写,用于详细描述和分析出现在系统、设备、产品或服务中的故障原因和根本原因。这些报告旨在对故障进行系统性的研究,以便团队…

Windows沙盒的安装与配置
沙盒安装
1、打开控制面板 2、选择程序与功能 3、勾选Windows 沙盒,然后点击确定,等待安装完成即可。 沙盒配置
Windows 沙盒支持简单的配置文件,这些文件为沙盒提供最少的自定义参数集。 此功能可与 Windows 10 内部版本 18342 或 Windows…

数据库管理-第九十二期 一周故障汇总(20230717)
第九十二期 一周故障汇总(20230717)
距离上一篇已经过了整整一周了,平时我虽然不是生产队的驴,但是一周一篇以上的数量还是维持了一段时间了。为啥上周只写了一篇,因为各种故障、各种保障、各种割接忙了整整一周&…

数据分析师:解读数据背后的故事
数据在当今信息时代中扮演着至关重要的角色,而数据分析师则是解读和发掘数据中隐藏信息的关键人物。作为数据分析师,他们运用统计学、机器学习和数据可视化等技术手段,从海量的数据中提取出有价值的信息和洞察,并将其转化为可供决…
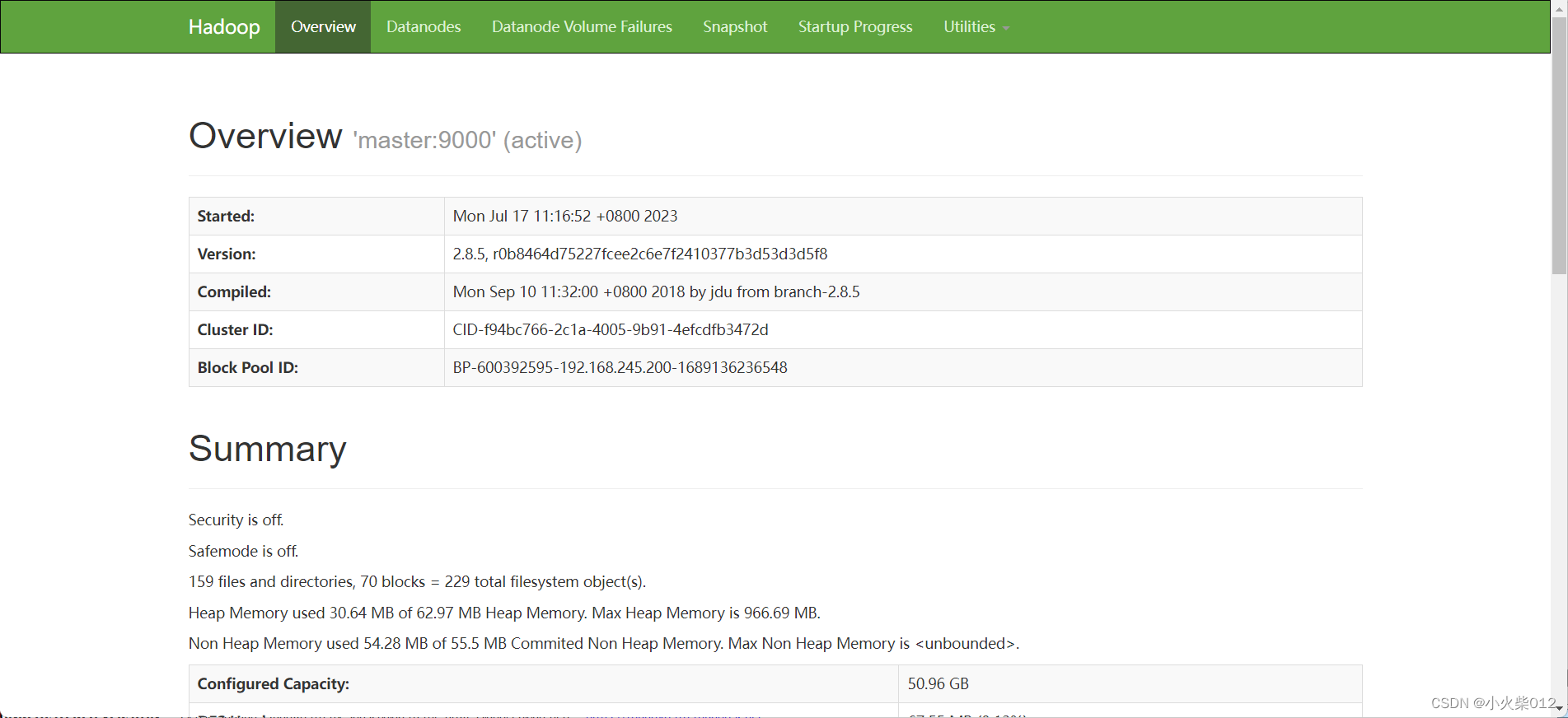
大数据学习02-Hadoop分布式集群部署
操作系统:centos7 软件环境:jdk8、hadoop-2.8.5
一、创建虚拟机
1.下载VMware,建议支持正版 2.安装到Widows目录下任意位置即可,安装目录自定义。打开VMware,界面如下: 3.创建虚拟机 创建虚拟机—>选择自定义 …
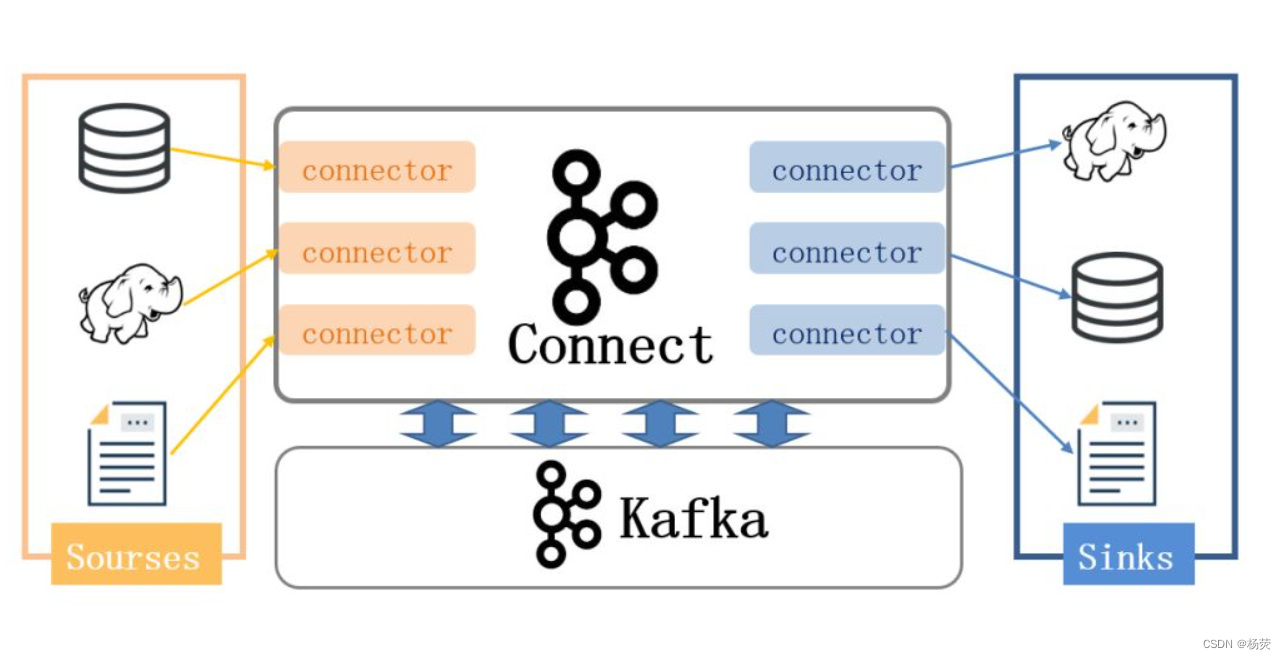
kafka消息队列最常用的两种模式,以及应用场景
目录
一、发布-订阅模式
二、点对点模式
三、应用场景 一、发布-订阅模式
发布-订阅模式是最常见的消息传递模式,其中消息发布者将消息发送到一个或多个主题(Topic),而订阅者可以选择订阅一个或多个主题来接收消息。每个订阅者…
在嵌入式系统开发培训中常用的数据库有哪些种?
数据库是一种储存和管理、组织数据的仓库,在嵌入式开发当中起到至关重要的作用。一个在嵌入式培训中,我们可学习使用的数据库有多种,每种数据库都会呈现出不同的一面,那么我们在嵌入式系统开发培训中可用到的数据库都有哪几种&…

JQuery(二):DOM操作、动画、遍历、事件绑定
1.DOM操作
1.1内容操作
html(): 获取/设置元素的标签体内容 <a><font>内容</font></a> --> <font>内容</font>text(): 获取/设置元素的标签体纯文本内容 <a><font>内容</font></a> --> 内容val()&am…

RK3588+FPGA视频实时处理与双屏显示、存储解决方案
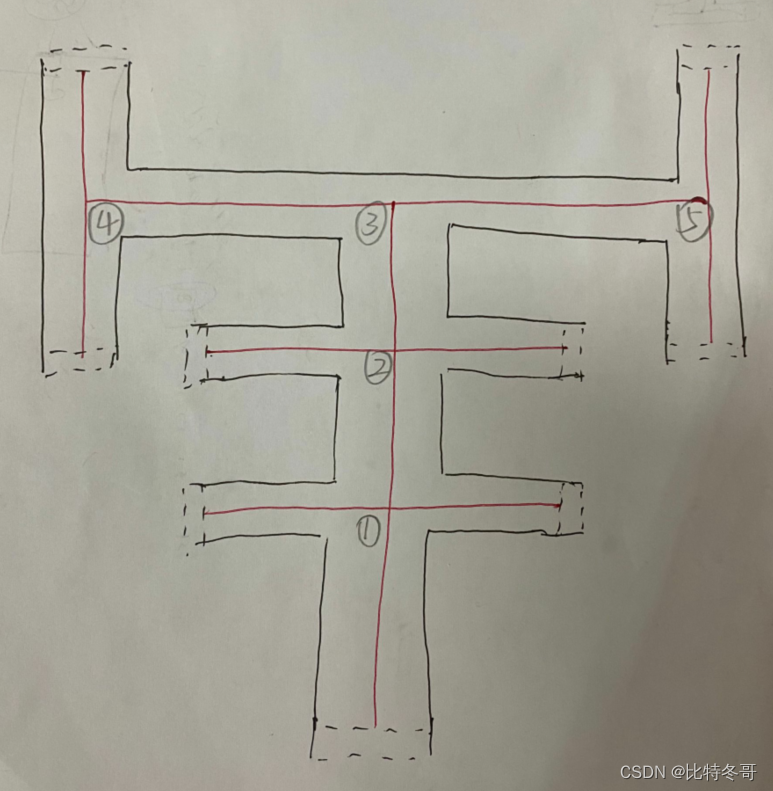
主板平台的主要功能电路示意图 在ARM端: 脚踏开关是电平输入10 口,双路。 触摸面板与主板的连接方式为 UART 外加12V 电源。 键盘为自开发产品,通过USB透传 UART,并传递12V电源USB、千兆网络为主板上的接口,USB 为3.0版本host 接口…

Hadoop 之 单机部署和测试(一)
Hadoop单机部署和测试 一.单机部署1.安装 JDK(JDK11)2.安装 HADOOP3.测试 一.单机部署
系统版本:cat /etc/anolis-release1.安装 JDK(JDK11)
#!/bin/bashTOP_PATH$(pwd)
JAVA_PATH/usr/local/java
FILEls $TOP_PATH/…

【Linux | Shell】结构化命令2 - test命令、方括号测试条件、case命令
目录 一、概述二、test 命令2.1 test 命令2.2 方括号测试条件2.3 test 命令和测试条件可以判断的 3 类条件2.3.1 数值比较2.3.2 字符串比较 三、复合条件测试四、if-then 的高级特性五、case 命令 一、概述 上篇文章介绍了 if 语句相关知识。但 if 语句只能执行命令,…

兴达易控modbus转profinet网关与三菱变频器通讯
本案例分享兴达易控modbus转profinet网关(MDPN100)连接西门子1200plc,实现三菱变频器485通讯兼容转modbusTCP通信,在博图中配置。 拓展图 打开博图,并添加PLC 加载由兴达易控免费提供的modbus转profinet GSD文件 安装网…
基于MSP432P401R送药小车【2021年电赛F题】
文章目录 一、任务清单1. 硬件部分2. 软件部分 二、神经网络训练1. 创建数据集2. 数据采集3. 数字训练 三、OpenMV数字及其坐标识别四、巡线1. 直行2. 转向3. 停止 五、路口判断与原路径返回六、技术交流 由于前边已经用MSP430做过一遍该赛题了,这里就不再重复叙述赛…

Java培训:什么是Busy spin?为什么要使用Busy spin?
Busy spin(繁忙自旋)是一种线程等待的技术,它通过循环检查条件来等待某个事件或条件的发生,而不进行阻塞或休眠。 通常情况下,线程等待事件发生的方式是使用阻塞或休眠操作,这样线程会释放CPU资源,其他线程可以继续执行…
Qt6 Qt Quick UI原型学习QML第二篇
Qt6 Qt Quick UI原型学习QML第二篇 界面效果QML语法语法讲解核心要素项目元素矩形元素文本元素图像元素MouseArea元素 界面效果 QML语法
import QtQuick 2.12
import QtQuick.Window 2.12Window {id: rootvisible: truewidth: 640height: 480title: qsTr("QML学习第二篇&…

【题解】 模拟赛2 题解
T1
假设商品价格为x 618:int(x*0.66) 211:x-(x/100)*35 两者比较一下大小即可
#include<bits/stdc.h>
using namespace std;int x,x1,x2;int main(){scanf("%d",&x);x1 x*0.66;x2 x-(x/100)*35;if (x1 x2) printf("both\n%d",x1);if (x1 &g…

浏览器打开PDF标题乱码
问题
使用 itext5 用pdf模板生成预览pdf乱码问题
解决办法
使用pdf编辑器打开之后,选择 文件>> 属性, 修改乱码的标题。

【业务功能篇45】SSM整合shiro项目:web.xml执行顺序
web.xml 的加载顺序是:ServletContext -> context-param -> listener -> filter -> servlet 学习shiro时,需要配置shiro ,我们需要在filter过滤器之前,先初始化好shiro组件,不然请求认证无法走到shiro,根据…
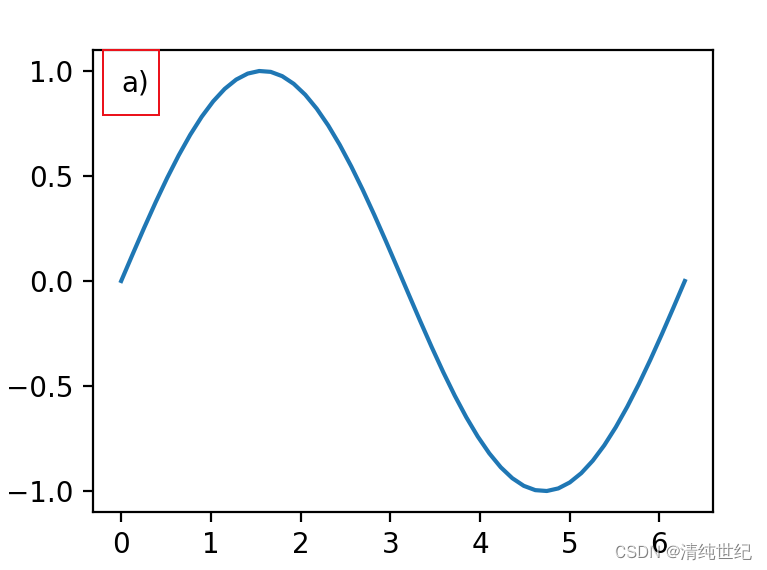
plt.text()函数解析
plt.text(x, y, s, fontsize, verticalalignment,horizontalalignment,rotation , *kwargs)
参数:
x,y:表示坐标值上的值s:表示说明文字fontsize:表示字体大小verticalalignment:垂直对齐方式 ,参数:[ ‘center’ | ‘top’ | ‘…