1.在linux环境下封装串口相关代码
(1)vi uartTool.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "wiringSerial.h"
int myserialOpen (const char *device, const int baud)
{
struct termios options ;
speed_t myBaud ;
int status, fd ;
switch (baud){
case 9600: myBaud = B9600 ; break ;
case 115200: myBaud = B115200 ; break ;
}
if ((fd = open (device, O_RDWR | O_NOCTTY | O_NDELAY | O_NONBLOCK)) == -1)
return -1 ;
fcntl (fd, F_SETFL, O_RDWR) ;
// Get and modify current options:
tcgetattr (fd, &options) ;
cfmakeraw (&options) ;
cfsetispeed (&options, myBaud) ;
cfsetospeed (&options, myBaud) ;
options.c_cflag |= (CLOCAL | CREAD) ;
options.c_cflag &= ~PARENB ;
options.c_cflag &= ~CSTOPB ;
options.c_cflag &= ~CSIZE ;
options.c_cflag |= CS8 ;
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ;
options.c_oflag &= ~OPOST ;
options.c_cc [VMIN] = 0 ;
options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds)
tcsetattr (fd, TCSANOW, &options) ;
ioctl (fd, TIOCMGET, &status);
status |= TIOCM_DTR ;
status |= TIOCM_RTS ;
ioctl (fd, TIOCMSET, &status);
usleep (10000) ; // 10mS
return fd ;
}
void serialSendstring (const int fd, const char *s)
{
int ret;
ret = write (fd, s, strlen (s));
if (ret < 0)
printf("Serial Puts Error\n");
}
int serialGetstring (const int fd, char *buffer)
{
int n_read;
n_read = read(fd, buffer,32);
return n_read;
}(2)vi uartTest.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <pthread.h>
#include "uartTool.h"
int fd;
void* readSerial()
{
char buffer[32];
while(1){
memset(buffer,'\0',sizeof(buffer));
serialGetstring(fd, buffer);
printf("GET->%s\n",buffer);
}
}
void* sendSerial()
{
char buffer[32];
while(1){
memset(buffer,'\0',sizeof(buffer));
scanf("%s",buffer);
serialSendstring(fd, buffer);
}
}
int main(int argc, char **argv)
{
char deviceName[32] = {'\0'};
pthread_t readt;
pthread_t sendt;
if(argc < 2){
printf("uage:%s /dev/ttyS?\n",argv[0]);
return -1;
}
strcpy(deviceName, argv[1]);
if( (fd = myserialOpen(deviceName, 115200)) == -1){
printf("open %s error\n",deviceName);
return -1;
}
pthread_create(&readt, NULL, readSerial,NULL);
pthread_create(&sendt, NULL, sendSerial,NULL);
while(1){sleep(10);}
}
(3)vi uartTool.h
int myserialOpen (const char *device, const int baud);
void serialSendstring (const int fd, const char *s);
int serialGetstring (const int fd, char *buffer);
2.开发板接线和共地图示(根据原理图)

3.编译结果:

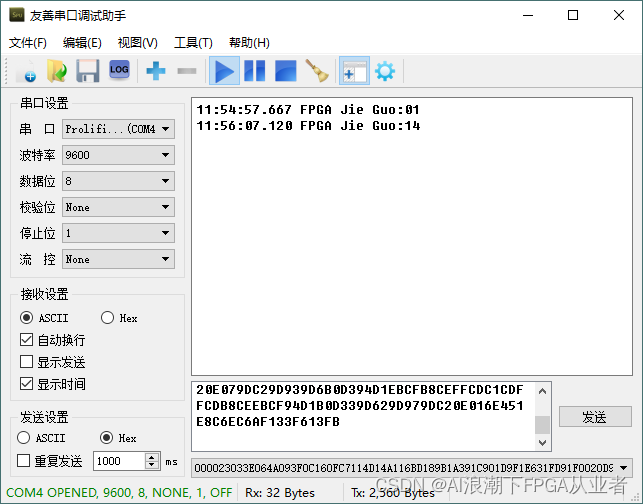
串口调试助手图示