1.点云可视化工具
1.1 cloudcompare下载安装
sudo snap install cloudcompare启动方法:
#open pointcloud viewer
cloudcompare.ccViewer
#open the main software
cloudcompare.CloudCompare使用上述第一条命令,读取的点云某一帧数据,我的点云格式为txt(单帧)。如下

此外,cloudcompare还支持的格式:pcd等等.
另外,cloudcompare不支持读取bin格式的文件(KITTI 的点云数据就是这种格式)。需要先把bin转换为其他格式。
1.2 ROS-rviz
ROS-rviz工具可以从rosbag数据中读数据。

1.3 PCL
使用pcl_viewer可以读取pcd点云文件,安装方法如下
sudo apt-get install pcl-tools
#使用方法
pcl_viewer xxx.pcd
1.4 Open3D
以下是Open3D读取的点云,可视化的结果。我安装的是python版本的Open3D,安装方式如下
pip install open3d -i https://pypi.tuna.tsinghua.edu.cn/simple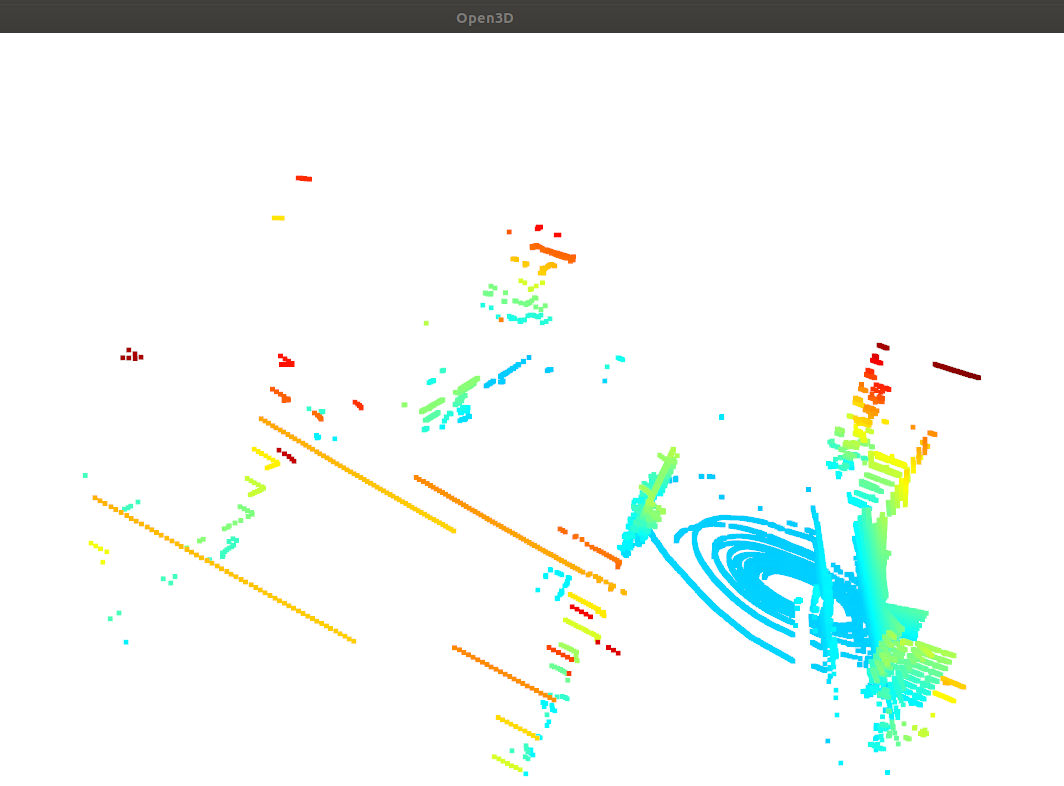
2.点云数据格式转换
点云最常用的数据格式就是rosbag(多帧), 以及通过 Wireshark 抓取的pcap包(多帧)。
单帧的数据格式有txt,pcd, bin。
2.1 如何读取并可视化pcap包中的点云数据-PCL方式
这篇博客讲述了用PCL库读取并可视化pcap点云数据。
用PCL直接读取并显示PCAP文件_pcl读pcap点云文件_captainzx的博客-CSDN博客
2.2 如何读取并可视化pcap包中的点云数据-速腾SDK方式
在速腾激光雷达的 ros 驱动上,修改 ros_rslidar 中的 rs_lidar_16.launch 文件,回放 pcap
2.3如何将pcap包中的点云数据转化为rosbag。
2.4 如何从多帧的rosbag数据中,截取单帧的点云数据。基于python语言实现
rosbag->txt;
txt->pcd; pcd->txt;
txt->bin; bin->txt;
bin->pcd; pcd->bin;
本人已实现以上方法,如需要,请私信联系!
3.点云标注工具labelcloud





![.NetCore录屏生成Gif动图程序(Form)的开发过程[代码已上传GitCode]](https://img-blog.csdnimg.cn/b6b8d4e71af84b29b251ec2dcd4842a2.gif)