环境:ubuntu18.04
ros:melodic
此博客前提你已经安装了moveit,如果未安装,可参考链接
一、启动MoveIt Setup Assistant
roslaunch moveit_setup_assistant setup_assistant.launch
点击:Create New MoveIt Configuration Package
点击Browse:选择你机器人的xacro文件,然后Load Files
 二、Generate Self-Collision Matrix
二、Generate Self-Collision Matrix
默认设置10000就可以,点击Generate Collision Matrix自动生成
三、Virtual Joints
没用,直接跳过
四、Add Planning Groups,添加规划组,非常重要!非常重要!非常重要!
这一步很容易出错,弄错就GG,按照以下流程就不会有问题。
点击Add Group:给规划组起个名字 ,我有两个臂+两个末端,所以弄了四个组,
机械臂本体选择add joints,运动学求解器选kdl就可以,然后把关节1到6全都加到右边,一定要一个一个加,不要按住shift一起加,那样后期容易报错。
末端抓手选择add links,而且不要选择运动学求解器,把末端相关的加进去,也是一个一个加到右边,结果如下图

五、Add Robot Poses
自定义home姿态,方便机械臂回到该位置,可以拖动进度条,看到右边模型机械臂姿态的变化,根据自己机械臂的情况设置即可。
我的左臂home为:0, 3.14, 1.57, 0, 0, 0
我的右臂home为:0, 3.14, 4.71, 0, 0, 0
六、End Effectors
设置如下

七、Add Passive Joints
没用,跳过
八、3D Perception
没用,跳过
八、Simulation
没用,跳过
九、ROS control
设置如下

十、Add Author Information
一定要留下姓名和邮箱,不然报错
十一、Generate Configuration Files
选择字前建好的moveit_config文件夹
然后点击Generate Package按钮,大公告从!!!!

不容易不容易,完结撒花~~~
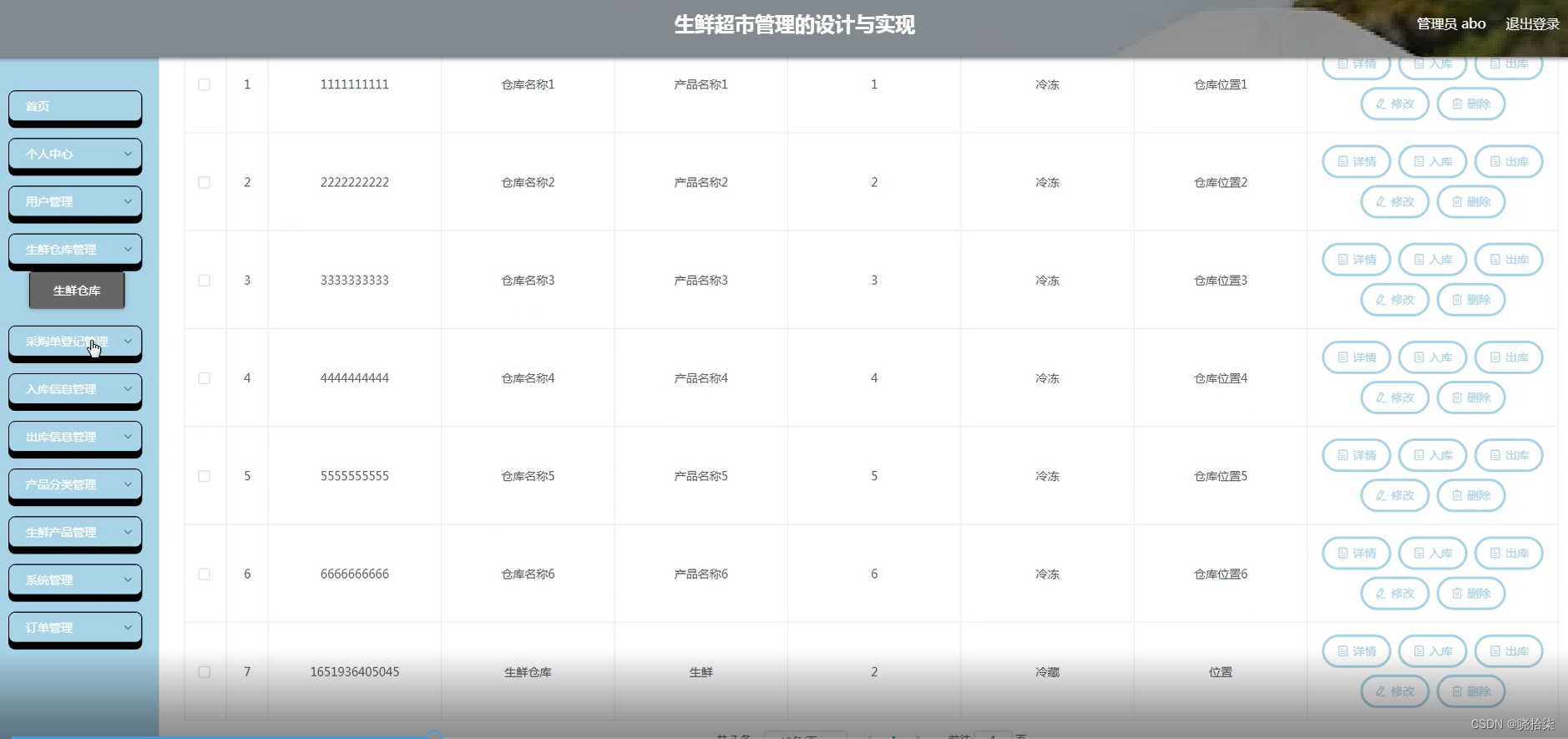
上一张效果图