💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
-
对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:
-
机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。
-
运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器人的运动学关系。这包括肢体的长度、关节的自由度和关节角度等。
-
步态规划:根据机器人的运动学模型和运动要求,设计合适的步态规划算法,确定机器人四条腿的运动轨迹。常见的步态包括小跑步态、奔跑步态等。
-
动力学建模:根据机器人的运动学模型和外部力矩,建立动力学模型,描述机器人的运动动力学关系。这包括机器人的质量、惯性矩阵和关节的扭矩等。
-
电气系统设计:根据机器人的电动驱动方式,设计电气系统,包括电机、电池、控制器等。需要考虑电机的功率、电池容量和控制器的算法等。
以上是对具有电动驱动的四足机器人进行建模的一般步骤。具体的建模方法和工具可以根据实际情况选择,例如使用MATLAB/Simulink进行建模和仿真,或者使用ROS(机器人操作系统)进行控制和模拟。建模过程中需要考虑机器人的力学特性、动力学特性和控制策略等,以实现机器人的稳定运动和高效控制。
-
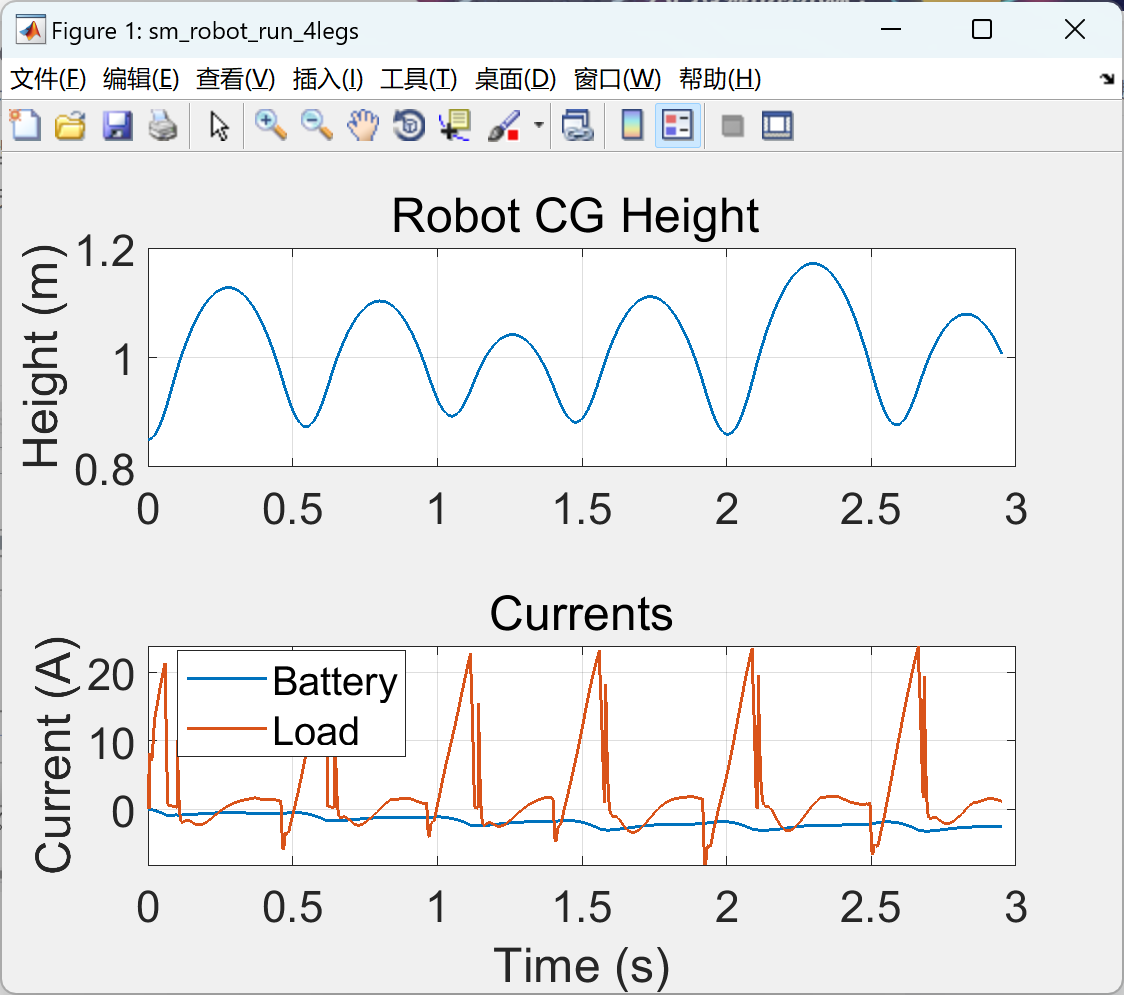
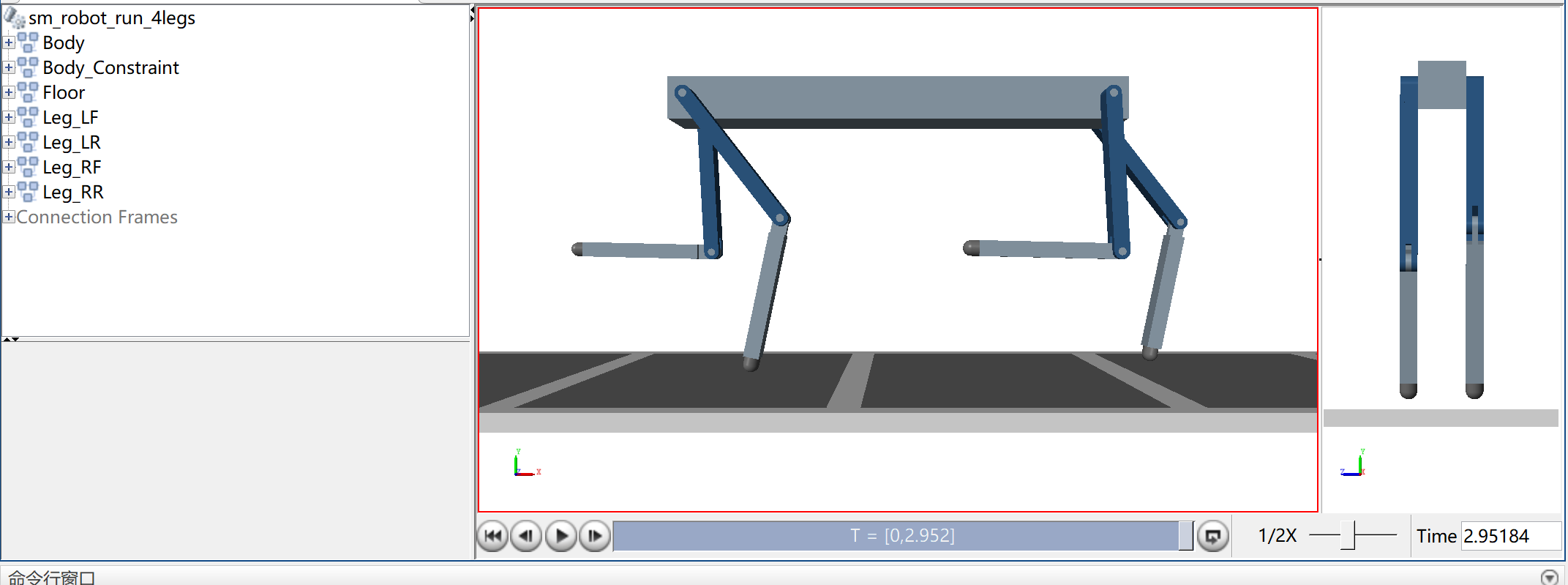
本文具有电动驱动的四足机器人模型,包括步态分析和设计工作流程。对具有电动驱动的四足机器人进行建模。机器人用四条腿小跑步态奔跑。支持模型解释并自动化了肢体、关节角度轨迹和电气系统的设计过程。
📚2 运行结果

部分代码:
set_param('sm_robot_run_4legs/Gait Phase','LinkStatus','none')
open_system('sm_robot_run_4legs/Gait Phase','force')
%% Contact Forces Between Feet and Floor
%
% Two methods are used for modeling the contact force between the foot and
% the floor. One is used for the X-Y plane only, the other accommodates
% movement in any direction. You can select the appropriate force for your
% test using a parameter in the leg subsystem mask.
%
% *Planar Contact Model*
%
% The planar variant of the contact force model assumes that the leg is
% moving in the positive global x direction and stays within the XY-plane.
% Simulink is used to model a spring-damper that connects the end of the
% leg to the floor at the exact location where it lands. This
% spring-damper is deactivated when the foot leaves the floor. This
% idealized form of a contact model is good for initial testing.
%
% <matlab:open_system('sm_robot_run_4legs');open_system('sm_robot_run_4legs/Leg%20RR/Contact%20Force%20Model/Planar','force'); Open Subsystem>
set_param('sm_robot_run_4legs/Leg RR/','popup_contact_model','Planar');
set_param('sm_robot_run_4legs/Leg RR','LinkStatus','none')
open_system('sm_robot_run_4legs/Leg RR/Contact Force Model/Planar','force')
%%
% *Six Degree of Freedom Contact Model*
%
% This variant of the contact force model assumes the end of the leg is a
% sphere and detects collision between the sphere and the surface of the
% floor. It models contact and friction force between the sphere and the
% plane. It is valid for all six degrees of freedom.
%
% <matlab:open_system('sm_robot_run_4legs');open_system('sm_robot_run_4legs/Leg%20RR/Contact%20Force%20Model/SixDOF','force'); Open Subsystem>
set_param('sm_robot_run_4legs/Leg RR/','popup_contact_model','Six DOF');
open_system('sm_robot_run_4legs/Leg RR/Contact Force Model/SixDOF','force')
%% Simulation Results from Simscape Logging
%%
%
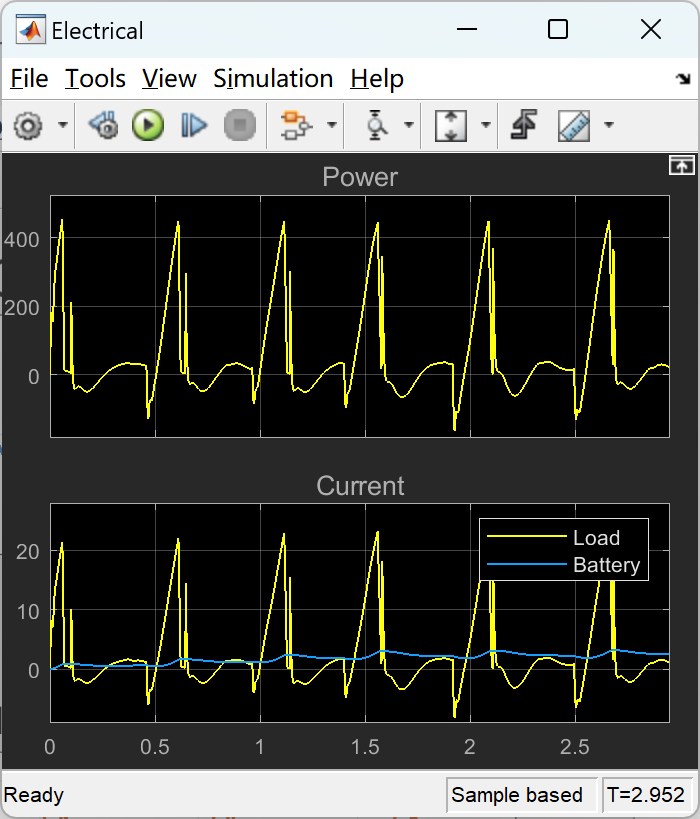
% The plot below shows the current drawn by the motor and supplied by the
% battery as the robot runs.
%
set_param('sm_robot_run_4legs/Leg RR/','popup_contact_model','Planar');
close_system('sm_robot_run_4legs/Leg RR/Contact Force Model/Planar')
sm_robot_run_4legs_plot1current;
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
-
陈刚, 张晓东, & 陈晓宇. (2019). 四足机器人步态规划与控制. 机器人技术与应用, 38(2), 1-8.
-
王晓东, & 张晓东. (2018). 基于四足机器人的步态规划与控制研究. 机器人技术与应用, 37(6), 1-8.
-
张晓东, & 陈刚. (2017). 四足机器人步态规划与控制方法研究. 机器人技术与应用, 36(6), 1-8.