1.简单概念
1.1 调度器的三个抽象概念:G、M、P
- G:代表一个 goroutine,每个 goroutine 都有自己独立的栈存放当前的运行内存及状态。可以把一个 G 当做一个任务。
- M: 代表内核线程(Pthread),它本身就与一个内核线程进行绑定,goroutine 运行在 M 上。
- P:代表一个处理器,可以认为一个“有运行任务”的 P 占了一个 CPU 线程的资源,且只要处于调度的时候就有 P。
注:内核线程和 CPU 线程的区别,在系统里可以有上万个内核线程,但 CPU 线程并没有那么多,CPU 线程也就是 Top 命令里看到的 CPU0、CPU1、CPU2…的数量。
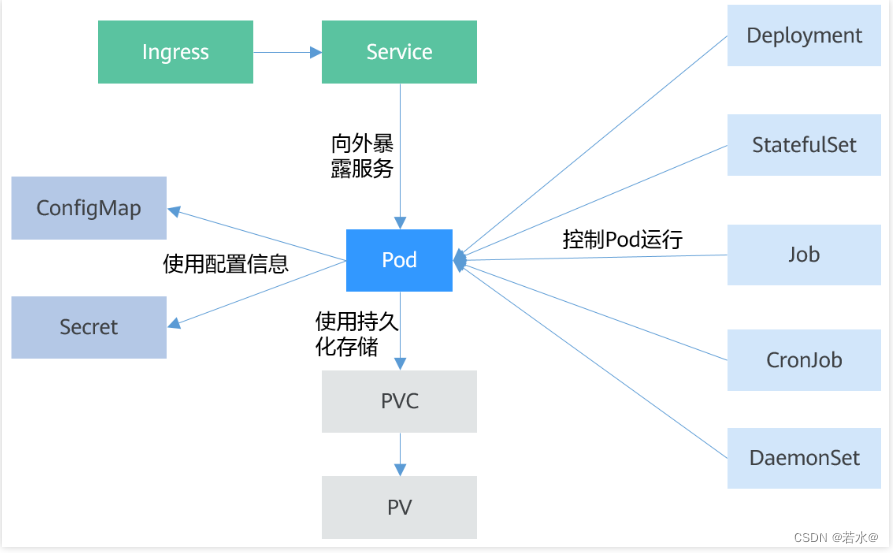
三者关系大致如下图:
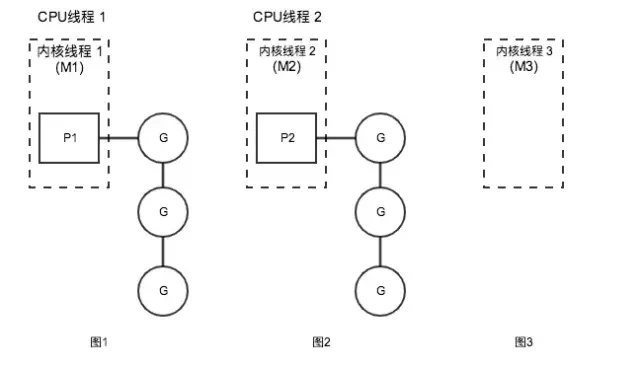
图 1、图 2 代表 2 个有运行任务时的状态。M 与一个内核线程绑定,可运行的 goroutine 列表存放到 P 里面,然后占用了一个 CPU 线程来运行。
图 3 代表没有运行任务时的状态,M 依然与一个内核线程绑定,由于没有运行任务因此不占用 CPU 线程,同时也不占用 P。
1.2 调度的大致轮廓
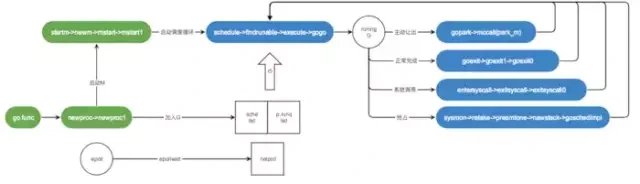
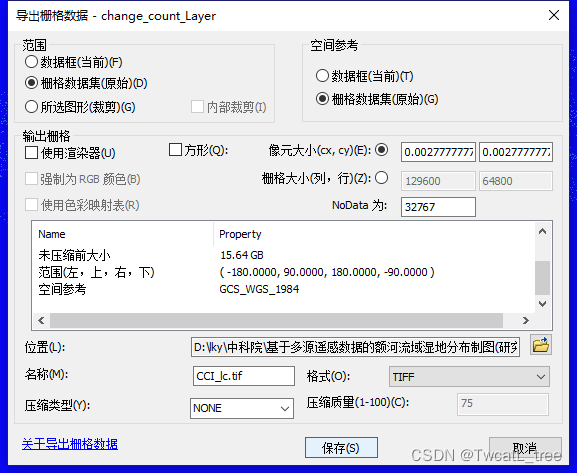
图中表述了由 go func 触发的调度。先创建 M 通过 M 启动调度循环,然后调度循环过程中获取 G 来执行,执行过程中遇到图中 running G 后面几个 case 再次进入下一循环。
下面从程序启动、调度循环、G 的来源三个角度分析调度的实现。
2.进程启动时都做了什么
下面先看一段程序启动的代码
// runtime/asm_amd64.s
TEXT runtime·rt0_go(SB),NOSPLIT,$0
......此处省略N多代码......
ok:
// set the per-goroutine and per-mach "registers"
get_tls(BX) // 将 g0 放到 tls(thread local storage)里
LEAQ runtime·g0(SB), CX
MOVQ CX, g(BX)
LEAQ runtime·m0(SB), AX
// save m->g0 = g0 // 将全局M0与全局G0绑定
MOVQ CX, m_g0(AX)
// save m0 to g0->m
MOVQ AX, g_m(CX)
CLD // convention is D is always left cleared
CALL runtime·check(SB)
MOVL 16(SP), AX // copy argc
MOVL AX, 0(SP)
MOVQ 24(SP), AX // copy argv
MOVQ AX, 8(SP)
CALL runtime·args(SB) // 解析命令行参数
CALL runtime·osinit(SB) // 只初始化了CPU核数
CALL runtime·schedinit(SB) // 内存分配器、栈、P、GC回收器等初始化
// create a new goroutine to start program
MOVQ $runtime·mainPC(SB), AX //
PUSHQ AX
PUSHQ $0 // arg size
CALL runtime·newproc(SB) // 创建一个新的G来启动runtime.main
POPQ AX
POPQ AX
// start this M
CALL runtime·mstart(SB) // 启动M0,开始等待空闲G,正式进入调度循环
MOVL $0xf1, 0xf1 // crash
RET
在启动过程里主要做了这三个事情(这里只跟调度相关的):
- 初始化固定数量的 P
- 创建一个新的 G 来启动 runtime.main, 也就是 runtime 下的 main 方法
- 创建全局 M0、全局 G0,启动 M0 进入第一个调度循环
M0 是什么?程序里会启动多个 M,第一个启动的叫 M0。
G0 是什么?G 分三种,第一种是执行用户任务的叫做 G,第二种执行 runtime 下调度工作的叫G0,每个 M 都绑定一个 G0。第三种则是启动 runtime.main 用到的 G。写程序接触到的基本都是第一种
我们按照顺序看是怎么完成上面三个事情的。
2.1 runtime.osinit(SB)方法针对系统环境的初始化
这里实质只做了一件事情,就是获取 CPU 的线程数,也就是 Top 命令里看到的 CPU0、CPU1、CPU2…的数量。
// runtime/os_linux.go
func osinit() {
ncpu = getproccount()
}
2.2 runtime.schedinit(SB)调度相关的一些初始化
// runtime/proc.go
// 设置最大M数量
sched.maxmcount = 10000
// 初始化当前M,即全局M0
mcommoninit(_g_.m)
// 查看应该启动的P数量,默认为cpu core数.
// 如果设置了环境变量GOMAXPROCS则以环境变量为准,最大不得超过_MaxGomaxprocs(1024)个
procs := ncpu
if n, ok := atoi32(gogetenv("GOMAXPROCS")); ok && n > 0 {
procs = n
}
if procs > _MaxGomaxprocs {
procs = _MaxGomaxprocs
}
// 调整P数量,此时由于是初始化阶段,所以P都是新建的
if procresize(procs) != nil {
throw("unknown runnable goroutine during bootstrap")
}
这里 sched.maxmcount 设置了 M 最大的数量,而 M 代表的是系统内核线程,因此可以认为一个进程最大只能启动 10000 个系统线程。
procresize 初始化 P 的数量,procs 参数为初始化的数量,而在初始化之前先做数量的判断,默认是 ncpu(与 CPU 核数相等)。也可以通过环境变量 GOMAXPROCS 来控制 P 的数量。_MaxGomaxprocs 控制了最大的 P 数量只能是 1024。
有些人在进程初始化的时候经常用到 runtime.GOMAXPROCS() 方法,其实也是调用的 procresize 方法重新设置了最大 CPU 使用数量。
2.3 runtime·mainPC(SB)启动监控任务
// runtime/proc.go
// The main goroutine.
func main() {
......
// 启动后台监控
systemstack(func() {
newm(sysmon, nil)
})
......
}
在 runtime 下会启动一个全程运行的监控任务,该任务用于标记抢占执行过长时间的 G,以及检测 epoll 里面是否有可执行的 G。下面会详细说到。
2.4 最后 runtime·mstart(SB)启动调度循环
前面都是各种初始化操作,在这里开启了调度器的第一个调度循环。(这里启动的 M 就是 M0)
下面来围绕 G、M、P 三个概念介绍 Goroutine 调度循环的运作流程。
3.调度循环都做了什么
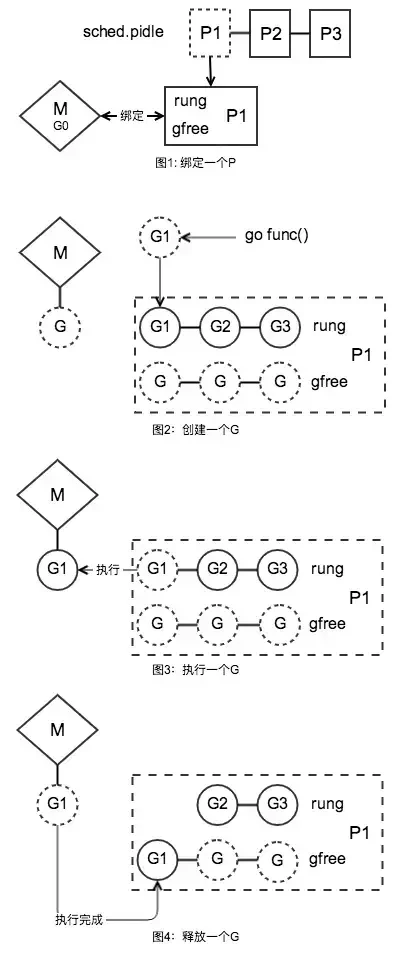
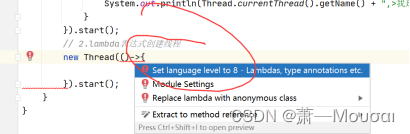
图 1 代表 M 启动的过程,把 M 跟一个 P 绑定再一起。在程序初始化的过程中说到在进程启动的最后一步启动了第一个 M(即 M0),这个 M 从全局的空闲 P 列表里拿到一个 P,然后与其绑定。而 P 里面有 2 个管理 G 的链表(runq 存储等待运行的 G 列表,gfree 存储空闲的 G 列表),M 启动后等待可执行的 G。
图 2 代表创建 G 的过程。创建完一个 G 先扔到当前 P 的 runq 待运行队列里。在图 3 的执行过程里,M 从绑定的 P 的 runq 列表里获取一个 G 来执行。当执行完成后,图 4 的流程里把 G 仍到 gfree 队列里。注意此时 G 并没有销毁(只重置了 G 的栈以及状态),当再次创建 G 的时候优先从 gfree 列表里获取,这样就起到了复用 G 的作用,避免反复与系统交互创建内存。
M 即启动后处于一个自循环状态,执行完一个 G 之后继续执行下一个 G,反复上面的图 2~图 4 过程。当第一个 M 正在繁忙而又有新的 G 需要执行时,会再开启一个 M 来执行。
下面详细看下调度循环的实现。
3.1 调度器如何开启调度循环
先看一下 M 的启动过程(M0 启动是个特殊的启动过程,也是第一个启动的 M,由汇编实现的初始化后启动,而后续的 M 创建以及启动则是 Go 代码实现)。
// runtime/proc.go
func startm(_p_ *p, spinning bool) {
lock(&sched.lock)
if _p_ == nil {
// 从空闲P里获取一个
_p_ = pidleget()
......
}
// 获取一个空闲的m
mp := mget()
unlock(&sched.lock)
// 如果没有空闲M,则new一个
if mp == nil {
var fn func()
if spinning {
// The caller incremented nmspinning, so set m.spinning in the new M.
fn = mspinning
}
newm(fn, _p_)
return
}
......
// 唤醒M
notewakeup(&mp.park)
}
func newm(fn func(), _p_ *p) {
// 创建一个M对象,且与P关联
mp := allocm(_p_, fn)
// 暂存P
mp.nextp.set(_p_)
mp.sigmask = initSigmask
......
execLock.rlock() // Prevent process clone.
// 创建系统内核线程
newosproc(mp, unsafe.Pointer(mp.g0.stack.hi))
execLock.runlock()
}
// runtime/os_linux.go
func newosproc(mp *m, stk unsafe.Pointer) {
// Disable signals during clone, so that the new thread starts
// with signals disabled. It will enable them in minit.
var oset sigset
sigprocmask(_SIG_SETMASK, &sigset_all, &oset)
ret := clone(cloneFlags, stk, unsafe.Pointer(mp), unsafe.Pointer(mp.g0), unsafe.Pointer(funcPC(mstart)))
sigprocmask(_SIG_SETMASK, &oset, nil)
}
func allocm(_p_ *p, fn func()) *m {
......
mp := new(m)
mp.mstartfn = fn // 设置启动函数
mcommoninit(mp) // 初始化m
// 创建g0
// In case of cgo or Solaris, pthread_create will make us a stack.
// Windows and Plan 9 will layout sched stack on OS stack.
if iscgo || GOOS == "solaris" || GOOS == "windows" || GOOS == "plan9" {
mp.g0 = malg(-1)
} else {
mp.g0 = malg(8192 * sys.StackGuardMultiplier)
}
// 把新创建的g0与M做关联
mp.g0.m = mp
......
return mp
}
func mstart() {
......
mstart1()
}
func mstart1() {
......
// 进入调度循环(阻塞不返回)
schedule()
}
非 M0 的启动首先从 startm 方法开始启动,要进行调度工作必须有调度处理器 P,因此先从空闲的 P 链表里获取一个 P,在 newm 方法创建一个 M 与 P 绑定。
newm 方法中通过 newosproc 新建一个内核线程,并把内核线程与 M 以及 mstart 方法进行关联,这样内核线程执行时就可以找到 M 并且找到启动调度循环的方法。最后 schedule 启动调度循环
allocm 方法中创建 M 的同时创建了一个 G 与自己关联,这个 G 就是我们在上面说到的 g0。为什么 M 要关联一个 g0?因为 runtime 下执行一个 G 也需要用到栈空间来完成调度工作,而拥有执行栈的地方只有 G,因此需要为每个执行线程里配置一个 g0。
3.2 调度器如何进行调度循环
调用 schedule 进入调度器的调度循环后,在这个方法里永远不再返回。下面看下实现。
// runtime/proc.go
func schedule() {
_g_ := getg()
// 进入gc MarkWorker 工作模式
if gp == nil && gcBlackenEnabled != 0 {
gp = gcController.findRunnableGCWorker(_g_.m.p.ptr())
}
if gp == nil {
// Check the global runnable queue once in a while to ensure fairness.
// Otherwise two goroutines can completely occupy the local runqueue
// by constantly respawning each other.
// 每处理n个任务就去全局队列获取G任务,确保公平
if _g_.m.p.ptr().schedtick%61 == 0 && sched.runqsize > 0 {
lock(&sched.lock)
gp = globrunqget(_g_.m.p.ptr(), 1)
unlock(&sched.lock)
}
}
// 从P本地获取
if gp == nil {
gp, inheritTime = runqget(_g_.m.p.ptr())
if gp != nil && _g_.m.spinning {
throw("schedule: spinning with local work")
}
}
// 从其它地方获取G,如果获取不到则沉睡M,并且阻塞在这里,直到M被再次使用
if gp == nil {
gp, inheritTime = findrunnable() // blocks until work is available
}
......
// 执行找到的G
execute(gp, inheritTime)
}
// 从P本地获取一个可运行的G
func runqget(_p_ *p) (gp *g, inheritTime bool) {
// If there's a runnext, it's the next G to run.
// 优先从runnext里获取一个G,如果没有则从runq里获取
for {
next := _p_.runnext
if next == 0 {
break
}
if _p_.runnext.cas(next, 0) {
return next.ptr(), true
}
}
// 从队头获取
for {
h := atomic.Load(&_p_.runqhead) // load-acquire, synchronize with other consumers
t := _p_.runqtail
if t == h {
return nil, false
}
gp := _p_.runq[h%uint32(len(_p_.runq))].ptr()
if atomic.Cas(&_p_.runqhead, h, h+1) { // cas-release, commits consume
return gp, false
}
}
}
// 从其它地方获取G
func findrunnable() (gp *g, inheritTime bool) {
......
// 从本地队列获取
if gp, inheritTime := runqget(_p_); gp != nil {
return gp, inheritTime
}
// 全局队列获取
if sched.runqsize != 0 {
lock(&sched.lock)
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
if gp != nil {
return gp, false
}
}
// 从epoll里取
if netpollinited() && sched.lastpoll != 0 {
if gp := netpoll(false); gp != nil { // non-blocking
......
return gp, false
}
}
......
// 尝试4次从别的P偷
for i := 0; i < 4; i++ {
for enum := stealOrder.start(fastrand()); !enum.done(); enum.next() {
if sched.gcwaiting != 0 {
goto top
}
stealRunNextG := i > 2 // first look for ready queues with more than 1 g
// 在这里开始针对P进行偷取操作
if gp := runqsteal(_p_, allp[enum.position()], stealRunNextG); gp != nil {
return gp, false
}
}
}
}
// 尝试从全局runq中获取G
// 在"sched.runqsize/gomaxprocs + 1"、"max"、"len(_p_.runq))/2"三个数字中取最小的数字作为获取的G数量
func globrunqget(_p_ *p, max int32) *g {
if sched.runqsize == 0 {
return nil
}
n := sched.runqsize/gomaxprocs + 1
if n > sched.runqsize {
n = sched.runqsize
}
if max > 0 && n > max {
n = max
}
if n > int32(len(_p_.runq))/2 {
n = int32(len(_p_.runq)) / 2
}
sched.runqsize -= n
if sched.runqsize == 0 {
sched.runqtail = 0
}
gp := sched.runqhead.ptr()
sched.runqhead = gp.schedlink
n--
for ; n > 0; n-- {
gp1 := sched.runqhead.ptr()
sched.runqhead = gp1.schedlink
runqput(_p_, gp1, false) // 放到本地P里
}
return gp
}
schedule 中首先尝试从 P 本地队列中获取(runqget)一个可执行的 G,如果没有则从其它地方获取(findrunnable),最终通过 execute 方法执行 G。
runqget 先通过 runnext 拿到待运行 G,没有的话,再从 runq 里面取。
findrunnable 从全局队列、epoll、别的 P 里获取。(后面会扩展分析实现)
在调度的开头出还做了一个小优化:每处理一些任务之后,就优先从全局队列里获取任务,以保障公平性,防止由于每个 P 里的 G 过多,而全局队列里的任务一直得不到执行机会。
这里用到了一个关键方法 getg(),runtime 的代码里大量使用该方法,它由汇编实现,该方法就是获取当前运行的 G,具体实现不再这里阐述。
3.3 多个线程下如何调度
抛出一个问题:每个 P 里面的 G 执行时间是不可控的,如果多个 P 同时在执行,会不会出现有的 P 里面的 G 执行不完,有的 P 里面几乎没有 G 可执行呢?
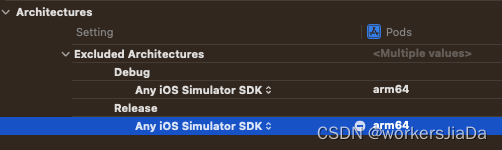
这就要从 M 的自循环过程中如何获取 G、归还 G 的行为说起了,先看图:
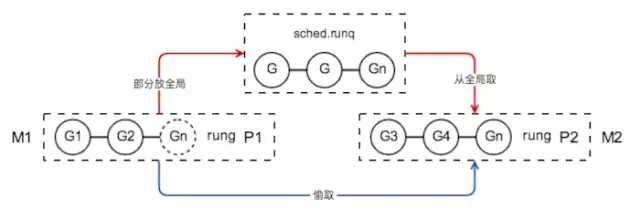
图中可以看出有两种途径:1.借助全局队列 sched.runq 作为中介,本地 P 里的 G 太多的话就放全局里,G 太少的话就从全局取。2.全局列表里没有的话直接从 P1 里偷取(steal)。(更多 M 在执行的话,同样的原理,这里就只拿 2 个来举例)
第 1 种途径实现如下:
// runtime/proc.go
func runqput(_p_ *p, gp *g, next bool) {
if randomizeScheduler && next && fastrand()%2 == 0 {
next = false
}
// 尝试把G添加到P的runnext节点,这里确保runnext只有一个G,如果之前已经有一个G则踢出来放到runq里
if next {
retryNext:
oldnext := _p_.runnext
if !_p_.runnext.cas(oldnext, guintptr(unsafe.Pointer(gp))) {
goto retryNext
}
if oldnext == 0 {
return
}
// 把老的g踢出来,在下面放到runq里
gp = oldnext.ptr()
}
retry:
// 如果_p_.runq队列不满,则放到队尾就结束了。
// 试想如果不放到队尾而放到队头里会怎样?如果频繁的创建G则可能后面的G总是不被执行,对后面的G不公平
h := atomic.Load(&_p_.runqhead) // load-acquire, synchronize with consumers
t := _p_.runqtail
if t-h < uint32(len(_p_.runq)) {
_p_.runq[t%uint32(len(_p_.runq))].set(gp)
atomic.Store(&_p_.runqtail, t+1) // store-release, makes the item available for consumption
return
}
//如果队列满了,尝试把G和当前P里的一部分runq放到全局队列
//因为操作全局需要加锁,所以名字里带个slow
if runqputslow(_p_, gp, h, t) {
return
}
// the queue is not full, now the put above must succeed
goto retry
}
func runqputslow(_p_ *p, gp *g, h, t uint32) bool {
var batch [len(_p_.runq)/2 + 1]*g
// First, grab a batch from local queue.
n := t - h
n = n / 2
if n != uint32(len(_p_.runq)/2) {
throw("runqputslow: queue is not full")
}
// 从runq头部开始取出一半的runq放到临时变量batch里
for i := uint32(0); i < n; i++ {
batch[i] = _p_.runq[(h+i)%uint32(len(_p_.runq))].ptr()
}
if !atomic.Cas(&_p_.runqhead, h, h+n) { // cas-release, commits consume
return false
}
// 把要put的g也放进batch去
batch[n] = gp
if randomizeScheduler {
for i := uint32(1); i <= n; i++ {
j := fastrandn(i + 1)
batch[i], batch[j] = batch[j], batch[i]
}
}
// 把取出来的一半runq组成链表
for i := uint32(0); i < n; i++ {
batch[i].schedlink.set(batch[i+1])
}
// 将一半的runq放到global队列里,一次多转移一些省得转移频繁
lock(&sched.lock)
globrunqputbatch(batch[0], batch[n], int32(n+1))
unlock(&sched.lock)
return true
}
func globrunqputbatch(ghead *g, gtail *g, n int32) {
gtail.schedlink = 0
if sched.runqtail != 0 {
sched.runqtail.ptr().schedlink.set(ghead)
} else {
sched.runqhead.set(ghead)
}
sched.runqtail.set(gtail)
sched.runqsize += n
}
runqput 方法归还执行完的 G,runq 定义是 runq [256]guintptr,有固定的长度,因此当前 P 里的待运行 G 超过 256 的时候说明过多了,则执行 runqputslow 方法把一半 G 扔给全局 G 链表,globrunqputbatch 连接全局链表的头尾指针。
但可能别的 P 里面并没有超过 256,就不会放到全局 G 链表里,甚至可能一直维持在不到 256 个。这就借助第 2 个途径了:
第 2 种途径实现如下:
// runtime/proc.go
// 从其它地方获取G
func findrunnable() (gp *g, inheritTime bool) {
......
// 尝试4次从别的P偷
for i := 0; i < 4; i++ {
for enum := stealOrder.start(fastrand()); !enum.done(); enum.next() {
if sched.gcwaiting != 0 {
goto top
}
stealRunNextG := i > 2 // first look for ready queues with more than 1 g
// 在这里开始针对P进行偷取操作
if gp := runqsteal(_p_, allp[enum.position()], stealRunNextG); gp != nil {
return gp, false
}
}
}
}
从别的 P 里面"偷取"一些 G 过来执行了。runqsteal 方法实现了"偷取"操作。
// runtime/proc.go
// 偷取P2一半到本地运行队列,失败则返回nil
func runqsteal(_p_, p2 *p, stealRunNextG bool) *g {
t := _p_.runqtail
n := runqgrab(p2, &_p_.runq, t, stealRunNextG)
if n == 0 {
return nil
}
n--
// 返回尾部的一个G
gp := _p_.runq[(t+n)%uint32(len(_p_.runq))].ptr()
if n == 0 {
return gp
}
h := atomic.Load(&_p_.runqhead) // load-acquire, synchronize with consumers
if t-h+n >= uint32(len(_p_.runq)) {
throw("runqsteal: runq overflow")
}
atomic.Store(&_p_.runqtail, t+n) // store-release, makes the item available for consumption
return gp
}
// 从P里获取一半的G,放到batch里
func runqgrab(_p_ *p, batch *[256]guintptr, batchHead uint32, stealRunNextG bool) uint32 {
for {
// 计算一半的数量
h := atomic.Load(&_p_.runqhead) // load-acquire, synchronize with other consumers
t := atomic.Load(&_p_.runqtail) // load-acquire, synchronize with the producer
n := t - h
n = n - n/2
......
// 将偷到的任务转移到本地P队列里
for i := uint32(0); i < n; i++ {
g := _p_.runq[(h+i)%uint32(len(_p_.runq))]
batch[(batchHead+i)%uint32(len(batch))] = g
}
if atomic.Cas(&_p_.runqhead, h, h+n) { // cas-release, commits consume
return n
}
}
}
上面可以看出从别的 P 里面偷(steal)了一半,这样就足够运行了。有了“偷取”操作也就充分利用了多线程的资源。
4.调度循环中如何让出 CPU
4.1 执行完成让出 CPU
绝大多数场景下我们程序都是执行完一个 G,再执行另一个 G,那我们就看下 G 是如何被执行以及执行完如何退出的。
先看 G 如何被执行:
// runtime/proc.go
func execute(gp *g, inheritTime bool) {
_g_ := getg()
casgstatus(gp, _Grunnable, _Grunning)
......
// 真正的执行G,切换到该G的栈帧上执行(汇编实现)
gogo(&gp.sched)
}
execute 方法先更改 G 的状态为_Grunning 表示运行中,最终给 gogo 方法做实际的执行操作。而 gogo 方法则是汇编实现。再来看下 gogo 方法的实现:
// runtime.asm_amd64.s
TEXT runtime·gogo(SB), NOSPLIT, $16-8
MOVQ buf+0(FP), BX // gobuf 把0偏移的8个字节给BX寄存器, gobuf结构的前8个字节就是SP指针
// If ctxt is not nil, invoke deletion barrier before overwriting.
MOVQ gobuf_ctxt(BX), AX // 在把gobuf的ctxt变量给AX寄存器
TESTQ AX, AX // 判断AX寄存器是否为空,传进来gp.sched的话肯定不为空了,因此JZ nilctxt不跳转
JZ nilctxt
LEAQ gobuf_ctxt(BX), AX
MOVQ AX, 0(SP)
MOVQ $0, 8(SP)
CALL runtime·writebarrierptr_prewrite(SB)
MOVQ buf+0(FP), BX
nilctxt: // 下面则是函数栈的BP SP指针移动,最后进入到指定的代码区域
MOVQ gobuf_g(BX), DX
MOVQ 0(DX), CX // make sure g != nil
get_tls(CX)
MOVQ DX, g(CX)
MOVQ gobuf_sp(BX), SP // restore SP
MOVQ gobuf_ret(BX), AX
MOVQ gobuf_ctxt(BX), DX
MOVQ gobuf_bp(BX), BP
MOVQ $0, gobuf_sp(BX) // clear to help garbage collector
MOVQ $0, gobuf_ret(BX)
MOVQ $0, gobuf_ctxt(BX)
MOVQ $0, gobuf_bp(BX)
MOVQ gobuf_pc(BX), BX // PC指针指向退出时要执行的函数地址
JMP BX // 跳转到执行代码处
// runtime/runtime2.go
type gobuf struct {
// The offsets of sp, pc, and g are known to (hard-coded in) libmach.
//
// ctxt is unusual with respect to GC: it may be a
// heap-allocated funcval so write require a write barrier,
// but gobuf needs to be cleared from assembly. We take
// advantage of the fact that the only path that uses a
// non-nil ctxt is morestack. As a result, gogo is the only
// place where it may not already be nil, so gogo uses an
// explicit write barrier. Everywhere else that resets the
// gobuf asserts that ctxt is already nil.
sp uintptr
pc uintptr
g guintptr
ctxt unsafe.Pointer // this has to be a pointer so that gc scans it
ret sys.Uintreg
lr uintptr
bp uintptr // for GOEXPERIMENT=framepointer
}
gogo 方法传的参数注意是 gp.sched,而这个结构体里可以看到保存了熟悉的函数栈寄存器 SP/PC/BP,能想到是把执行栈传了进去(既然是执行一个 G,当然要把执行栈传进去了)。可以看到在 gogo 函数中实质就只是做了函数栈指针的移动。
这个执行 G 的操作,熟悉函数调用的函数栈的基本原理的人想必有些印象(如果不熟悉请自行搜索),执行一个 G 其实就是执行函数一样切换到对应的函数栈帧上。
C 语言里栈帧创建的时候有个 IP 寄存器指向"return address",即主调函数的一条指令的地址, 被调函数退出的时候通过该指针回到调用函数里。在 Go 语言里有个 PC 寄存器指向退出函数。那么下 PC 寄存器指向的是哪里?我们回到创建 G 的地方看下代码:
// runtime/proc.go
func newproc1(fn *funcval, argp *uint8, narg int32, nret int32, callerpc uintptr) *g {
......
// 从当前P里面复用一个空闲G
newg := gfget(_p_)
// 如果没有空闲G则新建一个,默认堆大小为_StackMin=2048 bytes
if newg == nil {
newg = malg(_StackMin)
casgstatus(newg, _Gidle, _Gdead)
// 把新创建的G添加到全局allg里
allgadd(newg) // publishes with a g->status of Gdead so GC scanner doesn't look at uninitialized stack.
}
......
newg.sched.sp = sp
newg.stktopsp = sp
newg.sched.pc = funcPC(goexit) + sys.PCQuantum // 记录当前任务的pc寄存器为goexit方法,用于当执行G结束后找到退出方法,从而再次进入调度循环 // +PCQuantum so that previous instruction is in same function
newg.sched.g = guintptr(unsafe.Pointer(newg))
gostartcallfn(&newg.sched, fn)
newg.gopc = callerpc
newg.startpc = fn.fn
.......
return newg
}
代码中可以看到,给 G 的执行环境里的 pc 变量赋值了一个 goexit 的函数地址,也就是说 G 正常执行完退出时执行的是 goexit 函数。再看下该函数的实现:
// runtime/asm_amd64.s
// The top-most function running on a goroutine
// returns to goexit+PCQuantum.
TEXT runtime·goexit(SB),NOSPLIT,$0-0
BYTE $0x90 // NOP
CALL runtime·goexit1(SB) // does not return
// traceback from goexit1 must hit code range of goexit
BYTE $0x90 // NOP
// runtime/proc.go
// G执行结束后回到这里放到P的本地队列里
func goexit1() {
if raceenabled {
racegoend()
}
if trace.enabled {
traceGoEnd()
}
// 切换到g0来释放G
mcall(goexit0)
}
// g0下当G执行结束后回到这里放到P的本地队列里
func goexit0(gp *g) {
......
gfput(_g_.m.p.ptr(), gp)
schedule()
}
代码中切换到了 G0 下执行了 schedule 方法,再次进度了下一轮调度循环。
以上就是正常执行一个 G 并正常退出的实现。
4.2 主动让出 CPU
在实际场景中还有一些没有执行完成的 G,而又需要临时停止执行,比如 time.Sleep、IO 阻塞等等,就需要挂起该 G,把 CPU 让出给别人使用。在 runtime 下面有个 gopark 方法,看下实现:
// runtime/proc.go
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer, reason string, traceEv byte, traceskip int) {
mp := acquirem()
gp := mp.curg
status := readgstatus(gp)
if status != _Grunning && status != _Gscanrunning {
throw("gopark: bad g status")
}
mp.waitlock = lock
mp.waitunlockf = *(*unsafe.Pointer)(unsafe.Pointer(&unlockf))
gp.waitreason = reason
mp.waittraceev = traceEv
mp.waittraceskip = traceskip
releasem(mp)
// can't do anything that might move the G between Ms here.
// mcall 在M里从当前正在运行的G切换到g0
// park_m 在切换到的g0下先把传过来的G切换为_Gwaiting状态挂起该G
// 调用回调函数waitunlockf()由外层决定是否等待解锁,返回true则等待解锁不在执行G,返回false则不等待解锁继续执行
mcall(park_m)
}
// runtime/stubs.go
// mcall switches from the g to the g0 stack and invokes fn(g),
// where g is the goroutine that made the call.
// mcall saves g's current PC/SP in g->sched so that it can be restored later.
......
func mcall(fn func(*g))
// runtime/proc.go
func park_m(gp *g) {
_g_ := getg() // 此处获得的是g0,而不是gp
if trace.enabled {
traceGoPark(_g_.m.waittraceev, _g_.m.waittraceskip)
}
casgstatus(gp, _Grunning, _Gwaiting)
dropg() // 把g0从M的"当前运行"里剥离出来
if _g_.m.waitunlockf != nil {
fn := *(*func(*g, unsafe.Pointer) bool)(unsafe.Pointer(&_g_.m.waitunlockf))
ok := fn(gp, _g_.m.waitlock)
_g_.m.waitunlockf = nil
_g_.m.waitlock = nil
if !ok { // 如果不需要等待解锁,则切换到_Grunnable状态并直接执行G
if trace.enabled {
traceGoUnpark(gp, 2)
}
casgstatus(gp, _Gwaiting, _Grunnable)
execute(gp, true) // Schedule it back, never returns.
}
}
schedule()
}
gopark 是进行调度出让 CPU 资源的方法,里面有个方法 mcall(),注释里这样描述:
从当前运行的 G 切换到 g0 的运行栈上,然后调用 fn(g),这里被调用的 G 是调用 mcall 方法时的 G。mcall 方法保存当前运行的 G 的 PC/SP 到 g->sched 里,因此该 G 可以在以后被重新恢复执行.
在本章开始介绍初始化过程中有提到 M 创建的时候绑定了一个 g0,调度工作是运行在 g0 的栈上的。mcall 方法通过 g0 先把当前调用的 G 的执行栈暂存到 g->sched 变量里,然后切换到 g0 的执行栈上执行 park_m。park_m 方法里把 gp 的状态从 _Grunning 切换到 _Gwaiting 表明进入到等待唤醒状态,此时休眠 G 的操作就完成了。接下来既然 G 休眠了,CPU 线程总不能闲下来,在 park_m 方法里又可以看到 schedule 方法,开始进入到到一轮调度循环了。
park_m 方法里还有段小插曲,进入调度循环之前还有个对 waitunlockf 方法的判断,该方法意思是如果解锁不成功则调用 execute 方法继续执行之前的 G,而该方法永远不会 return,也就不会再次进入下一次调度。也就是说给外部一个控制是否要进行下一个调度的选择。
4.3 抢占让出 CPU
回想在 runtime.main()里面有单独启动了一个监控任务,方法是 sysmon。看下该方法:
// runtime/proc.go
func sysmon() {
......
for {
// delay参数用于控制for循环的间隔,不至于无限死循环。
// 控制逻辑是前50次每次sleep 20微秒,超过50次则每次翻2倍,直到最大10毫秒
if idle == 0 { // start with 20us sleep...
delay = 20
} else if idle > 50 { // start doubling the sleep after 1ms...
delay *= 2
}
if delay > 10*1000 { // up to 10ms
delay = 10 * 1000
}
usleep(delay)
lastpoll := int64(atomic.Load64(&sched.lastpoll))
now := nanotime()
if lastpoll != 0 && lastpoll+10*1000*1000 < now {
atomic.Cas64(&sched.lastpoll, uint64(lastpoll), uint64(now))
gp := netpoll(false) // non-blocking - returns list of goroutines
if gp != nil {
......
incidlelocked(-1)
// 把epoll ready的G列表注入到全局runq里
injectglist(gp)
incidlelocked(1)
}
}
// retake P's blocked in syscalls
// and preempt long running G's
if retake(now) != 0 {
idle = 0
} else {
idle++
}
......
}
}
func retake(now int64) uint32 {
n := 0
for i := int32(0); i < gomaxprocs; i++ {
_p_ := allp[i] // 从所有P里面去找
if _p_ == nil {
continue
}
pd := &_p_.sysmontick
s := _p_.status
if s == _Psyscall {
......
} else if s == _Prunning { // 针对正在运行的P
// Preempt G if it's running for too long.
t := int64(_p_.schedtick)
if int64(pd.schedtick) != t {
pd.schedtick = uint32(t)
pd.schedwhen = now
continue
}
// 如果已经超过forcePreemptNS(10ms),则抢占
if pd.schedwhen+forcePreemptNS > now {
continue
}
// 抢占P
preemptone(_p_)
}
}
return uint32(n)
}
func preemptone(_p_ *p) bool {
mp := _p_.m.ptr()
if mp == nil || mp == getg().m {
return false
}
// 找到当前正在运行的G
gp := mp.curg
if gp == nil || gp == mp.g0 {
return false
}
// 标记抢占状态
gp.preempt = true
// Every call in a go routine checks for stack overflow by
// comparing the current stack pointer to gp->stackguard0.
// Setting gp->stackguard0 to StackPreempt folds
// preemption into the normal stack overflow check.
// G里面的每一次调用都会比较当前栈指针与 gp->stackguard0 来检查堆栈溢出
// 设置 gp->stackguard0 为 StackPreempt 来触发正常的堆栈溢出检测
gp.stackguard0 = stackPreempt
return true
}
sysmon() 方法处于无限 for 循环,整个进程的生命周期监控着。retake()方法每次对所有的 P 遍历检查超过 10ms 的还在运行的 G,如果有超过 10ms 的则通过 preemptone()进行抢占,但是要注意这里只把 gp.stackguard0 赋值了一个 stackPreempt,并没有做让出 CPU 的操作,因此这里的抢占实质只是一个”标记“抢占。那么真正停止 G 执行的操作在哪里?
// runtime/stack.go
func newstack(ctxt unsafe.Pointer) {
......
// NOTE: stackguard0 may change underfoot, if another thread
// is about to try to preempt gp. Read it just once and use that same
// value now and below.
// 这里的逻辑是为G的抢占做的判断。
// 判断是否是抢占引发栈扩张,如果 gp.stackguard0 == stackPreempt 则说明是抢占触发的栈扩张
preempt := atomic.Loaduintptr(&gp.stackguard0) == stackPreempt
......
//如果判断可以抢占, 则继续判断是否GC引起的, 如果是则对G的栈空间执行标记处理(扫描根对象)然后继续运行,
//如果不是GC引起的则调用gopreempt_m函数完成抢占.
if preempt {
......
// 停止当前运行状态的G,最后放到全局runq里,释放M
// 这里会进入schedule循环.阻塞到这里
gopreempt_m(gp) // never return
}
......
}
// runtime/proc.go
func goschedImpl(gp *g) {
status := readgstatus(gp)
if status&^_Gscan != _Grunning {
dumpgstatus(gp)
throw("bad g status")
}
casgstatus(gp, _Grunning, _Grunnable)
dropg()
lock(&sched.lock)
globrunqput(gp)
unlock(&sched.lock)
schedule()
}
我们都知道 Go 的调度是非抢占式的,要想实现 G 不被长时间,就只能主动触发抢占,而 Go 触发抢占的实际就是在栈扩张的时候,在 newstack 新创建栈空间的时候检测是否有抢占标记(也就是 gp.stackguard0 是否等于 stackPreempt),如果有则通过 goschedImpl 方法再次进入到熟悉的 schedule 调度循环。
4.4 系统调用让出 CPU
我们程序都跑在系统上面,就绕不开与系统的交互。那么当我们的 Go 程序做系统调用的时候,系统的方法不确定会阻塞多久,而我们程序又不知道运行的状态该怎么办?
在 Go 中并没有直接对系统内核函数调用,而是封装了个 syscall.Syscall 方法,先看下实现:
// syscall/syscall_unix.go
func Syscall(trap, a1, a2, a3 uintptr) (r1, r2 uintptr, err Errno)
// syscall/asm_linux_amd64.s
TEXT ·Syscall(SB),NOSPLIT,$0-56
CALL runtime·entersyscall(SB)
MOVQ a1+8(FP), DI
MOVQ a2+16(FP), SI
MOVQ a3+24(FP), DX
MOVQ $0, R10
MOVQ $0, R8
MOVQ $0, R9
MOVQ trap+0(FP), AX // syscall entry
SYSCALL // 进行系统调用
CMPQ AX, $0xfffffffffffff001
JLS ok
MOVQ $-1, r1+32(FP)
MOVQ $0, r2+40(FP)
NEGQ AX
MOVQ AX, err+48(FP)
CALL runtime·exitsyscall(SB)
RET
ok:
MOVQ AX, r1+32(FP)
MOVQ DX, r2+40(FP)
MOVQ $0, err+48(FP)
CALL runtime·exitsyscall(SB)
RET
在汇编代码中看出先是执行了 runtime·entersyscall 方法,然后进行系统调用,最后执行了 runtime·exitsyscall(SB),从字面意思看是进入系统调用之前先执行一些逻辑,退出系统调用之后执行一堆逻辑。看下具体实现:
// runtime/proc.go
func entersyscall(dummy int32) {
reentersyscall(getcallerpc(unsafe.Pointer(&dummy)), getcallersp(unsafe.Pointer(&dummy)))
}
func reentersyscall(pc, sp uintptr) {
......
// Leave SP around for GC and traceback.
// 保存执行现场
save(pc, sp)
_g_.syscallsp = sp
_g_.syscallpc = pc
// 切换到系统调用状态
casgstatus(_g_, _Grunning, _Gsyscall)
......
// Goroutines must not split stacks in Gsyscall status (it would corrupt g->sched).
// We set _StackGuard to StackPreempt so that first split stack check calls morestack.
// Morestack detects this case and throws.
_g_.stackguard0 = stackPreempt
_g_.m.locks--
}
进入系统调用前先保存执行现场,然后切换到_Gsyscall 状态,最后标记抢占,等待被抢占走。
// runtime/proc.go
func exitsyscall(dummy int32) {
......
// Call the scheduler.
mcall(exitsyscall0)
......
}
func exitsyscall0(gp *g) {
_g_ := getg()
casgstatus(gp, _Gsyscall, _Grunnable)
dropg()
lock(&sched.lock)
// 获取一个空闲的P,如果没有则放到全局队列里,如果有则执行
_p_ := pidleget()
if _p_ == nil {
globrunqput(gp) // 如果没有P就放到全局队列里,等待有资源时执行
} else if atomic.Load(&sched.sysmonwait) != 0 {
atomic.Store(&sched.sysmonwait, 0)
notewakeup(&sched.sysmonnote)
}
unlock(&sched.lock)
if _p_ != nil {
acquirep(_p_)
execute(gp, false) // Never returns. // 如果找到空闲的P则直接执行
}
if _g_.m.lockedg != nil {
// Wait until another thread schedules gp and so m again.
stoplockedm()
execute(gp, false) // Never returns.
}
stopm()
schedule() // Never returns. // 没有P资源执行,就继续下一轮调度循环
}
系统调用退出时,切到 G0 下把 G 状态切回来,如果有可执行的 P 则直接执行,如果没有则放到全局队列里,等待调度,最后又看到了熟悉的 schedule 进入下一轮调度循环。
5.待执行 G 的来源
5.1 go func 创建 G
当开启一个 Goroutine 的时候用到 go func()这样的语法,在 runtime 下其实调用的就是 newproc 方法。
// runtime/proc.go
func newproc(siz int32, fn *funcval) {
argp := add(unsafe.Pointer(&fn), sys.PtrSize)
pc := getcallerpc(unsafe.Pointer(&siz))
systemstack(func() {
newproc1(fn, (*uint8)(argp), siz, 0, pc)
})
}
func newproc1(fn *funcval, argp *uint8, narg int32, nret int32, callerpc uintptr) *g {
......
_p_ := _g_.m.p.ptr()
// 从当前P里面复用一个空闲G
newg := gfget(_p_)
// 如果没有空闲G则新建一个,默认堆大小为_StackMin=2048 bytes
if newg == nil {
newg = malg(_StackMin)
casgstatus(newg, _Gidle, _Gdead)
// 把新创建的G添加到全局allg里
allgadd(newg) // publishes with a g->status of Gdead so GC scanner doesn't look at uninitialized stack.
}
......
if isSystemGoroutine(newg) {
atomic.Xadd(&sched.ngsys, +1)
}
newg.gcscanvalid = false
casgstatus(newg, _Gdead, _Grunnable)
// 把G放到P里的待运行队列,第三参数设置为true,表示要放到runnext里,作为优先要执行的G
runqput(_p_, newg, true)
// 如果有其它空闲P则尝试唤醒某个M来执行
// 如果有M处于自璇等待P或G状态,放弃。
// NOTE: sched.nmspinning!=0说明正在有M被唤醒,这里判断sched.nmspinnin==0时才进入wakep是防止同时唤醒多个M
if atomic.Load(&sched.npidle) != 0 && atomic.Load(&sched.nmspinning) == 0 && mainStarted {
wakep()
}
......
return newg
}
newproc1 方法中 gfget 先从空闲的 G 列表获取一个 G 对象,没有则创建一个新的 G 对象,然后 runqput 放到当前 P 待运行队列里。
5.2 epoll 来源
回想上面分析抢占以及多线程下如何调度时都见到一个 netpoll 方法,这个方法就是从系统内核获取已经有数据的时间,然后映射到对应的 G 标记 ready。下面看实现:
// runtime/proc.go
func netpoll(block bool) *g {
......
var events [128]epollevent
retry:
n := epollwait(epfd, &events[0], int32(len(events)), waitms)
if n < 0 {
if n != -_EINTR {
println("runtime: epollwait on fd", epfd, "failed with", -n)
throw("runtime: netpoll failed")
}
goto retry
}
var gp guintptr
for i := int32(0); i < n; i++ {
ev := &events[i]
if ev.events == 0 {
continue
}
var mode int32
if ev.events&(_EPOLLIN|_EPOLLRDHUP|_EPOLLHUP|_EPOLLERR) != 0 {
mode += 'r'
}
if ev.events&(_EPOLLOUT|_EPOLLHUP|_EPOLLERR) != 0 {
mode += 'w'
}
if mode != 0 {
pd := *(**pollDesc)(unsafe.Pointer(&ev.data))
netpollready(&gp, pd, mode)
}
}
if block && gp == 0 {
goto retry
}
return gp.ptr()
}
func netpollready(gpp *guintptr, pd *pollDesc, mode int32) {
var rg, wg guintptr
if mode == 'r' || mode == 'r'+'w' {
rg.set(netpollunblock(pd, 'r', true))
}
if mode == 'w' || mode == 'r'+'w' {
wg.set(netpollunblock(pd, 'w', true))
}
if rg != 0 {
rg.ptr().schedlink = *gpp
*gpp = rg
}
if wg != 0 {
wg.ptr().schedlink = *gpp
*gpp = wg
}
}
// 解锁pd wait状态,标记为pdReady,并返回
func netpollunblock(pd *pollDesc, mode int32, ioready bool) *g {
gpp := &pd.rg
if mode == 'w' {
gpp = &pd.wg
}
for {
old := *gpp
if old == pdReady {
return nil
}
if old == 0 && !ioready {
// Only set READY for ioready. runtime_pollWait
// will check for timeout/cancel before waiting.
return nil
}
var new uintptr
if ioready {
new = pdReady
}
// 变量pd.rg在netpollblock的时候已经指向了运行pd的G,因此old其实指向G的指针,而不是pdWait等等的状态指针了
if atomic.Casuintptr(gpp, old, new) {
if old == pdReady || old == pdWait {
old = 0
}
return (*g)(unsafe.Pointer(old))
}
}
}
首先 epollwait 从内核获取到一批 event,也就拿到了有收到就绪的 FD。netpoll 的返回值是一个 G 链表,在该方法里只是把要被唤醒的 G 标记 ready,然后交给外部处理,例如 sysmon 中的代码:
// runtime/proc.go
func sysmon() {
......
for {
......
lastpoll := int64(atomic.Load64(&sched.lastpoll))
now := nanotime()
if lastpoll != 0 && lastpoll+10*1000*1000 < now {
atomic.Cas64(&sched.lastpoll, uint64(lastpoll), uint64(now))
gp := netpoll(false) // non-blocking - returns list of goroutines
if gp != nil {
......
incidlelocked(-1)
// 把epoll ready的G列表注入到全局runq里
injectglist(gp)
incidlelocked(1)
}
}
......
}
}
// 把G列表注入到全局runq里
func injectglist(glist *g) {
......
lock(&sched.lock)
var n int
for n = 0; glist != nil; n++ {
gp := glist
glist = gp.schedlink.ptr()
casgstatus(gp, _Gwaiting, _Grunnable)
globrunqput(gp)
}
......
}
netpoll 返回的链表交给了 injectglist,然后其实是放到了全局 rung 队列中,等待被调度。
6.看几个主动让出 CPU 的场景
6.1 time.Sleep
当代码中调用 time.Sleep 的时候我们是要 black 住程序不在继续往下执行,此时该 goroutine 不会做其他事情了,理应把 CPU 资源释放出来,下面看下实现:
// runtime/time.go
func timeSleep(ns int64) {
if ns <= 0 {
return
}
t := getg().timer
if t == nil {
t = new(timer)
getg().timer = t
}
*t = timer{} // 每个定时任务都创建一个timer
t.when = nanotime() + ns
t.f = goroutineReady // 记录唤醒该G的方法,唤醒时通过该方法执行唤醒
t.arg = getg() // 把timer与当前G关联,时间到了唤醒时通过该参数找到所在的G
lock(&timers.lock)
addtimerLocked(t) // 把timer添加到最小堆里
goparkunlock(&timers.lock, "sleep", traceEvGoSleep, 2) // 切到G0让出CPU,进入休眠
}
// runtime/proc.go
func goparkunlock(lock *mutex, reason string, traceEv byte, traceskip int) {
gopark(parkunlock_c, unsafe.Pointer(lock), reason, traceEv, traceskip)
}
timeSleep 函数里通过 addtimerLocked 把定时器加入到 timer 管理器(timer 通过最小堆的数据结构存放每个定时器,在这不做详细说明)后,再通过 goparkunlock 实现把当前 G 休眠,这里看到了上面提到的 gopark 方法进行调度循环的上下文切换。
上面介绍的是一个 G 如何进入到休眠状态的过程,该例子是个定时器,当时间到了的话,当前 G 就要被唤醒继续执行了。下面就介绍下唤醒的流程。
返回到最开始 timeSleep 方法里在进入调度方法之前有一个 addtimerLocked 方法,看下这个方法做了什么。
// runtime/time.go
func addtimerLocked(t *timer) {
// when must never be negative; otherwise timerproc will overflow
// during its delta calculation and never expire other runtime timers.
if t.when < 0 {
t.when = 1<<63 - 1
}
t.i = len(timers.t)
timers.t = append(timers.t, t) //将当前timer添加到timer管理器里
siftupTimer(t.i)
......
// 如果没有启动timer管理定时器,则启动。timerproc只会启动一次,即全局timer管理器
if !timers.created {
timers.created = true
go timerproc()
}
}
// runtime/time.go
// Timerproc runs the time-driven events.
// It sleeps until the next event in the timers heap.
// If addtimer inserts a new earlier event, it wakes timerproc early.
func timerproc() {
timers.gp = getg()
for {
lock(&timers.lock)
timers.sleeping = false
now := nanotime()
delta := int64(-1)
for {
if len(timers.t) == 0 {
delta = -1
break
}
t := timers.t[0]
delta = t.when - now
if delta > 0 {
break
}
if t.period > 0 {
// leave in heap but adjust next time to fire
t.when += t.period * (1 + -delta/t.period)
siftdownTimer(0)
} else {
// remove from heap
last := len(timers.t) - 1
if last > 0 {
timers.t[0] = timers.t[last]
timers.t[0].i = 0
}
timers.t[last] = nil
timers.t = timers.t[:last]
if last > 0 {
siftdownTimer(0)
}
t.i = -1 // mark as removed
}
f := t.f
arg := t.arg
seq := t.seq
unlock(&timers.lock)
if raceenabled {
raceacquire(unsafe.Pointer(t))
}
f(arg, seq)
lock(&timers.lock)
}
......
}
}
在 addtimerLocked 方法的最下面有个逻辑在运行期间开启了’全局时间事件驱动器’timerproc,该方法会全程遍历最小堆,寻找最早进入 timer 管理器的定时器,然后唤醒。他是怎么找到要唤醒哪个 G 的?回头看下 timeSleep 方法里把当时正在执行的 G 以及唤醒方法 goroutineReady 带到了每个定时器里,而在 timerproc 则通过找到期的定时器执行 f(arg, seq)
即通过 goroutineReady 方法唤醒。方法调用过程: goroutineReady() -> ready()
/// runtime/time.go
func goroutineReady(arg interface{}, seq uintptr) {
goready(arg.(*g), 0)
}
// runtime/proc.go
func goready(gp *g, traceskip int) {
systemstack(func() {
ready(gp, traceskip, true)
})
}
// Mark gp ready to run.
func ready(gp *g, traceskip int, next bool) {
if trace.enabled {
traceGoUnpark(gp, traceskip)
}
status := readgstatus(gp)
// Mark runnable.
_g_ := getg()
_g_.m.locks++ // disable preemption because it can be holding p in a local var
if status&^_Gscan != _Gwaiting {
dumpgstatus(gp)
throw("bad g->status in ready")
}
// status is Gwaiting or Gscanwaiting, make Grunnable and put on runq
casgstatus(gp, _Gwaiting, _Grunnable)
runqput(_g_.m.p.ptr(), gp, next)
......
}
在上面的方法里可以看到先把休眠的 G 从_Gwaiting 切换到_Grunnable 状态,表明已经可运行。然后通过 runqput 方法把 G 放到 P 的待运行队列里,就进入到调度器的调度循环里了。
总结:time.Sleep 想要进入阻塞(休眠)状态,其实是通过 gopark 方法给自己标记个_Gwaiting 状态,然后把自己所占用的 CPU 线程资源给释放出来,继续执行调度任务,调度其它的 G 来运行。而唤醒是通过把 G 更改回_Grunnable 状态后,然后把 G 放入到 P 的待运行队列里等待执行。通过这点还可以看出休眠中的 G 其实并不占用 CPU 资源,最多是占用内存,是个很轻量级的阻塞。
6.2 sync.Mutex
// sync/mutex.go
func (m *Mutex) Lock() {
// Fast path: grab unlocked mutex.
// 首先尝试抢锁,如果抢到则直接返回,并标记mutexLocked状态
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
var waitStartTime int64
starving := false
awoke := false
iter := 0
old := m.state
for {
// Don't spin in starvation mode, ownership is handed off to waiters
// so we won't be able to acquire the mutex anyway.
// 尝试自璇,但有如下几个条件跳过自璇,这里的自璇是用户态自璇,基本lock的cpu消耗都耗到这里了
// 1.不在饥饿模式自璇
// 2.超过4次循环,则不再自璇. (runtime_canSpin里面)
// 3.全部P空闲时,不自璇.(runtime_canSpin里面)
// 4.当前P里无运行G时,不自璇.(runtime_canSpin里面)
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// Active spinning makes sense.
// Try to set mutexWoken flag to inform Unlock
// to not wake other blocked goroutines.
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
awoke = true
}
runtime_doSpin() // doSpin其实就是用户态自璇30次
iter++
old = m.state
continue
}
......
if atomic.CompareAndSwapInt32(&m.state, old, new) {
......
runtime_SemacquireMutex(&m.sema, queueLifo) // 这里会再次自璇几次,然后最后切换到g0把G标记_Gwaiting状态阻塞在这里
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs // 如果锁等了1毫秒才被唤醒,才会标记为饥饿模式
old = m.state
......
} else {
old = m.state
}
}
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
}
// runtime/sema.go
func sync_runtime_Semacquire(addr *uint32) {
semacquire1(addr, false, semaBlockProfile)
}
func semacquire1(addr *uint32, lifo bool, profile semaProfileFlags) {
......
for {
......
// Any semrelease after the cansemacquire knows we're waiting
// (we set nwait above), so go to sleep.
root.queue(addr, s, lifo) // 把当前锁的信息存起来以便以后唤醒时找到当前G,G是在queue里面获取的。
goparkunlock(&root.lock, "semacquire", traceEvGoBlockSync, 4) // 进行休眠,然后阻塞在这里
if s.ticket != 0 || cansemacquire(addr) {
break
}
}
}
// queue adds s to the blocked goroutines in semaRoot.
func (root *semaRoot) queue(addr *uint32, s *sudog, lifo bool) {
s.g = getg() // 这里记录了当前的G,以便唤醒的时候找到要被唤醒的G
s.elem = unsafe.Pointer(addr)
s.next = nil
s.prev = nil
var last *sudog
pt := &root.treap
for t := *pt; t != nil; t = *pt {
......
last = t
if uintptr(unsafe.Pointer(addr)) < uintptr(t.elem) {
pt = &t.prev
} else {
pt = &t.next
}
}
......
Mutex.Lock 方法通过调用 runtime_SemacquireMutex 最终还是调用 goparkunlock 实现把 G 进入到休眠状态。在进入休眠之前先把自己加入到队列里 root.queue(addr, s, lifo),在 queue 方法里,记录了当前的 G,以便以后找到并唤醒。
// sync/mutex.go
func (m *Mutex) Unlock() {
......
if new&mutexStarving == 0 { // 如果不是饥饿模式
old := new
for {
......
if atomic.CompareAndSwapInt32(&m.state, old, new) {
runtime_Semrelease(&m.sema, false) // 唤醒锁
return
}
old = m.state
}
} else {
// Starving mode: handoff mutex ownership to the next waiter.
// Note: mutexLocked is not set, the waiter will set it after wakeup.
// But mutex is still considered locked if mutexStarving is set,
// so new coming goroutines won't acquire it.
runtime_Semrelease(&m.sema, true) // 唤醒锁
}
}
// runtime/sema.go
func sync_runtime_Semrelease(addr *uint32, handoff bool) {
semrelease1(addr, handoff)
}
func semrelease1(addr *uint32, handoff bool) {
root := semroot(addr)
s, t0 := root.dequeue(addr)
if s != nil {
atomic.Xadd(&root.nwait, -1)
}
......
if s != nil { // May be slow, so unlock first
......
readyWithTime(s, 5)
}
}
func readyWithTime(s *sudog, traceskip int) {
if s.releasetime != 0 {
s.releasetime = cputicks()
}
goready(s.g, traceskip)
}
Mutex. Unlock 方法通过调用 runtime_Semrelease 最终还是调用 goready 实现把 G 唤醒。
6.3 channel
// runtime/chan.go
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
// 寻找一个等待中的receiver,直接把值传给这个receiver,绕过下面channel buffer,
// 避免从sender buffer->chan buffer->receiver buffer,而是直接sender buffer->receiver buffer,仍然做了内存copy
if sg := c.recvq.dequeue(); sg != nil {
send(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true
}
// 如果没有receiver等待:
// 如果当前chan里的元素个数小于环形队列大小(也就是chan还没满),则把内存拷贝到channel buffer里,然后直接返回。
// 注意dataqsiz是允许为0的,当为0时,也不存在该if里面的内存copy
if c.qcount < c.dataqsiz {
// Space is available in the channel buffer. Enqueue the element to send.
qp := chanbuf(c, c.sendx) // 获取即将要写入的chan buffer的指针地址
if raceenabled {
raceacquire(qp)
racerelease(qp)
}
// 把元素内存拷贝进去.
// 注意这里产生了一次内存copy,也就是说如果没有receiver的话,就一定会产生内存拷贝
typedmemmove(c.elemtype, qp, ep)
c.sendx++ // 发送索引+1
if c.sendx == c.dataqsiz {
c.sendx = 0
}
c.qcount++ // 队列元素计数器+1
unlock(&c.lock)
return true
}
if !block { // 如果是非阻塞的,到这里就可以结束了
unlock(&c.lock)
return false
}
// ########下面是进入阻塞模式的如何实现阻塞的处理逻辑
// Block on the channel. Some receiver will complete our operation for us.
// 把元素相关信息、当前的G信息打包到一个sudog里,然后扔进send队列
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
mysg.g = gp // 把当前G也扔进sudog里,用于别人唤醒该G的时候找到该G
mysg.selectdone = nil
mysg.c = c
gp.waiting = mysg // 记录当前G正在等待的sudog
gp.param = nil
c.sendq.enqueue(mysg)
// 切换到g0,把当前G切换到_Gwaiting状态,然后唤醒lock.
// 此时当前G被阻塞了,P就继续执行其它G去了.
goparkunlock(&c.lock, "chan send", traceEvGoBlockSend, 3)
......
return true
}
func send(c *hchan, sg *sudog, ep unsafe.Pointer, unlockf func(), skip int) {
......
gp := sg.g
unlockf()
gp.param = unsafe.Pointer(sg)
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
goready(gp, skip+1)
}
当给一个 chan 发送消息的时候,实质触发的方法是 chansend。在该方法里不是先进入休眠状态。
1)如果此时有接收者接收这个 chan 的消息则直接把数据通过 send 方法扔给接收者,并唤醒接收者的 G,然后当前 G 则继续执行。
2)如果没有接收者,就把数据 copy 到 chan 的临时内存里,且内存没有满就继续执行当前 G。
3)如果没有接收者且 chan 满了,依然是通过 goparkunlock 方法进入休眠。在休眠前把当前的 G 相关信息存到队列(sendq)以便有接收者接收数据的时候唤醒当前 G。
func chanrecv(c *hchan, ep unsafe.Pointer, block bool) (selected, received bool) {
......
if sg := c.sendq.dequeue(); sg != nil {
// Found a waiting sender. If buffer is size 0, receive value
// directly from sender. Otherwise, receive from head of queue
// and add sender's value to the tail of the queue (both map to
// the same buffer slot because the queue is full).
// 寻找一个正在等待的sender
// 如果buffer size是0,则尝试直接从sender获取(这种情况是在环形队列长度(dataqsiz)为0的时候出现)
// 否则(buffer full的时候)从队列head接收,并且帮助sender在队列满时的阻塞的元素信息拷贝到队列里,然后将sender的G状态切换为_Grunning,这样sender就不阻塞了。
recv(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true, true
}
// 如果有数据则从channel buffer里获取数据后返回(此时环形队列长度dataqsiz!=0)
if c.qcount > 0 {
// Receive directly from queue
qp := chanbuf(c, c.recvx) // 获取即将要读取的chan buffer的指针地址
if raceenabled {
raceacquire(qp)
racerelease(qp)
}
if ep != nil {
typedmemmove(c.elemtype, ep, qp) // copy元素数据内存到channel buffer
}
typedmemclr(c.elemtype, qp)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.qcount--
unlock(&c.lock)
return true, true
}
if !block {
unlock(&c.lock)
return false, false
}
// ##########下面是无任何数据准备把当前G切换为_Gwaiting状态的逻辑
// no sender available: block on this channel.
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
gp.waiting = mysg
mysg.g = gp
mysg.selectdone = nil
mysg.c = c
gp.param = nil
c.recvq.enqueue(mysg)
// 释放了锁,然后把当前G切换为_Gwaiting状态,阻塞在这里等待有数据进来被唤醒
goparkunlock(&c.lock, "chan receive", traceEvGoBlockRecv, 3)
......
return true, !closed
}
func recv(c *hchan, sg *sudog, ep unsafe.Pointer, unlockf func(), skip int) {
......
sg.elem = nil
gp := sg.g
unlockf()
gp.param = unsafe.Pointer(sg)
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
goready(gp, skip+1)
}
chanrecv 方法是在 chan 接收者的地方调用的方法。
1)如果有发送者被休眠,则取出数据然后唤醒发送者,当前接收者的 G 拿到数据继续执行。
2)如果没有等待的发送者就看下有没有发送的数据还没被接收,有的话就直接取出数据然后返回,当前接收者的 G 拿到数据继续执行。(注意:这里取的数据不是正在等待的 sender 的数据,而是从 chan 的开头的内存取,如果是 sender 的数据则读出来的数据顺序就乱了)
3)如果即没有发送者,chan 里也没数据就通过 goparkunlock 进行休眠,在休眠之前把当前的 G 相关信息存到 recvq 里面,以便有数据时找到要唤醒的 G。