由于不同算法之间的坐标系不同,导致计算的结果混乱,该博客的目的是记录和统一不同算法之间的坐标系,保证坐标系的统一
一、VINS算法
- vins算法,使用D435I相机。
- 该坐标方向为:右前上分别为xyz。
- 角度:由于是四元素,暂时不考虑
- 使用xtdrone的代码,其中xyz方向还是右前上,
import rospy
from geometry_msgs.msg import PoseStamped, Point
from nav_msgs.msg import Odometry
import math
from pyquaternion import Quaternion
import tf
import sys
vehicle_type = sys.argv[1]
vehicle_id = sys.argv[2]
local_pose = PoseStamped()
local_pose.header.frame_id = 'world'
quaternion = tf.transformations.quaternion_from_euler(0, -math.pi/2, math.pi/2)
q = Quaternion([quaternion[3],quaternion[0],quaternion[1],quaternion[2]])
def vins_callback(data):
local_pose.pose.position.x = data.pose.pose.position.x
local_pose.pose.position.y = data.pose.pose.position.y
local_pose.pose.position.z = data.pose.pose.position.z
q_= Quaternion([data.pose.pose.orientation.w,data.pose.pose.orientation.x,data.pose.pose.orientation.y,data.pose.pose.orientation.z])
q_ = q_*q
local_pose.pose.orientation.w = q_[0]
local_pose.pose.orientation.x = q_[1]
local_pose.pose.orientation.y = q_[2]
local_pose.pose.orientation.z = q_[3]
rospy.init_node(vehicle_type+"_"+vehicle_id+'_vins_transfer')
rospy.Subscriber("/vins_estimator/camera_pose", Odometry, vins_callback,queue_size=1)
position_pub = rospy.Publisher(vehicle_type+"_"+vehicle_id+"/mavros/vision_pose/pose", PoseStamped, queue_size=1)
rate = rospy.Rate(30)
while not rospy.is_shutdown():
if (local_pose.pose.position == Point()):
continue
else:
print("Vins pose received")
local_pose.header.stamp = rospy.Time.now()
position_pub.publish(local_pose)
try:
rate.sleep()
except:
continue
二、MAVROS坐标
- 无人机坐标方向没有统一的概念,他是根据外部输入进行输出的。在vins输入中,由于初始化是在右前上,所以得到的local_position就为右前上。对于GPS定位,由于初始化是东北天?,所以就导致出使的xyz也是东北天,这和无人机的方位没有关系。
- 所以问题就在于,融合imu的时候,需要考虑imu的方向。
- imu加速度方向:向上加速为z增加;向前加速x增加;向左加速y增加。
- imu角速度方向:绕x轴(加速度轴)逆时针为x(角速度变量)增加、绕y轴逆时针为y增加,绕z轴逆时针为z增加
- imu四元素合成:imu会根据加速度和角速度进行一个四元素融合,得到xyzw值。
三、四元素和欧拉角
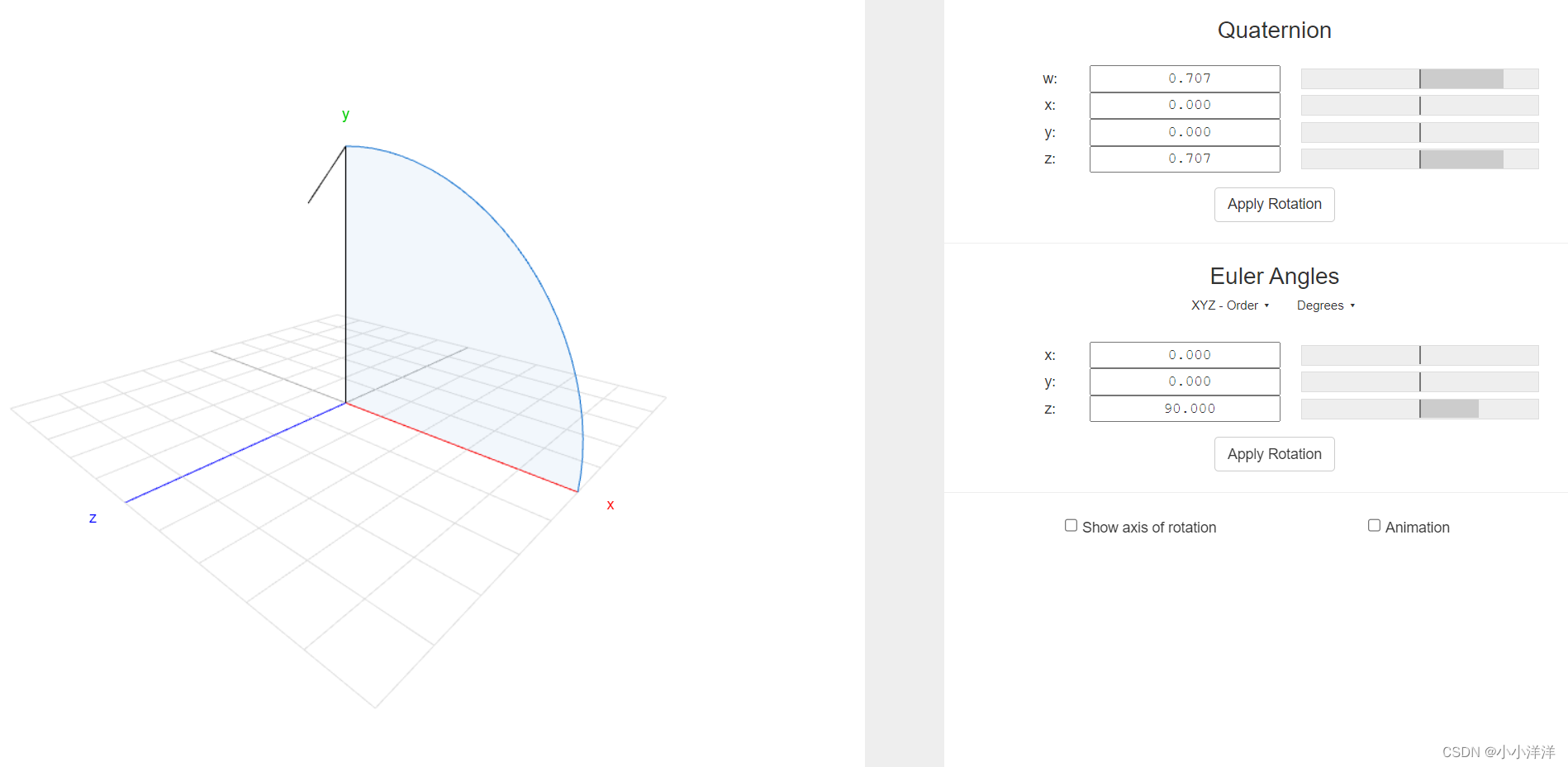
- 感觉四元素和欧拉角还有点不明确,通过这两个链接进一步了解:四元素与欧拉角和欧拉角的旋转。了解到,欧拉角的旋转有旋转顺序,我喜欢用ZYX,但是mavros是什么就不知道了的;欧拉角是根据自身的坐标系进行下一次的旋转的,这是根据IMU特性决定的,因此不是根据实验参考坐标系来,欧拉角的定义存在死锁问题,比如绕y旋转90°时,会导致z与x的旋转融合。四元素的定义是,绕旋转轴(xyz)旋转一个角度w,就是这么简单;其中w就是旋转角一半的余弦;xyz也要也是对应角度余弦(我还以为是矢量坐标,好像就是诶);最后,为了平方和为1,所以将xyz是之前的角度余弦呈上w得到的。
- 仿真和转换网站:四元素转换网站,可以用来仿真欧拉角的死锁,转换理解。
四、理解ros imu中的的四元素
- imu的四元素的坐标又是以什么的坐标系来的呢,这值得思考。初步发现,w值居然不是为1,而是0.7,这是为什么呢?默认猜测是如下,imu已经将绕z轴旋转了90°了。
- tf_conversions.transformations.quaternion_from_euler(roll, pitch, yaw) # 说明欧拉顺序为XYZ
quaternion = tf.transformations.quaternion_from_euler(0, -math.pi/2, math.pi/2)
q = Quaternion([quaternion[3],quaternion[0],quaternion[1],quaternion[2]]) # 这是因为得到的是xyzw,但是要转为wxyz
q_= Quaternion([data.pose.pose.orientation.w,data.pose.pose.orientation.x,data.pose.pose.orientation.y,data.pose.pose.orientation.z]) q_ = q_*q # 这是让原有视觉WXYZ进行一个坐标转换,得到的转换结果
- 问题来了,视觉VIO旋转方向为什么要转这样一个角度,旋转的角度是发生了什么。
- 旋转的角度:根据上述的VINS方向,原VIO方向为右前上,进行(0, -math.pi/2, math.pi/2)
转换后为前下左。(难道前下左为imu方向???)
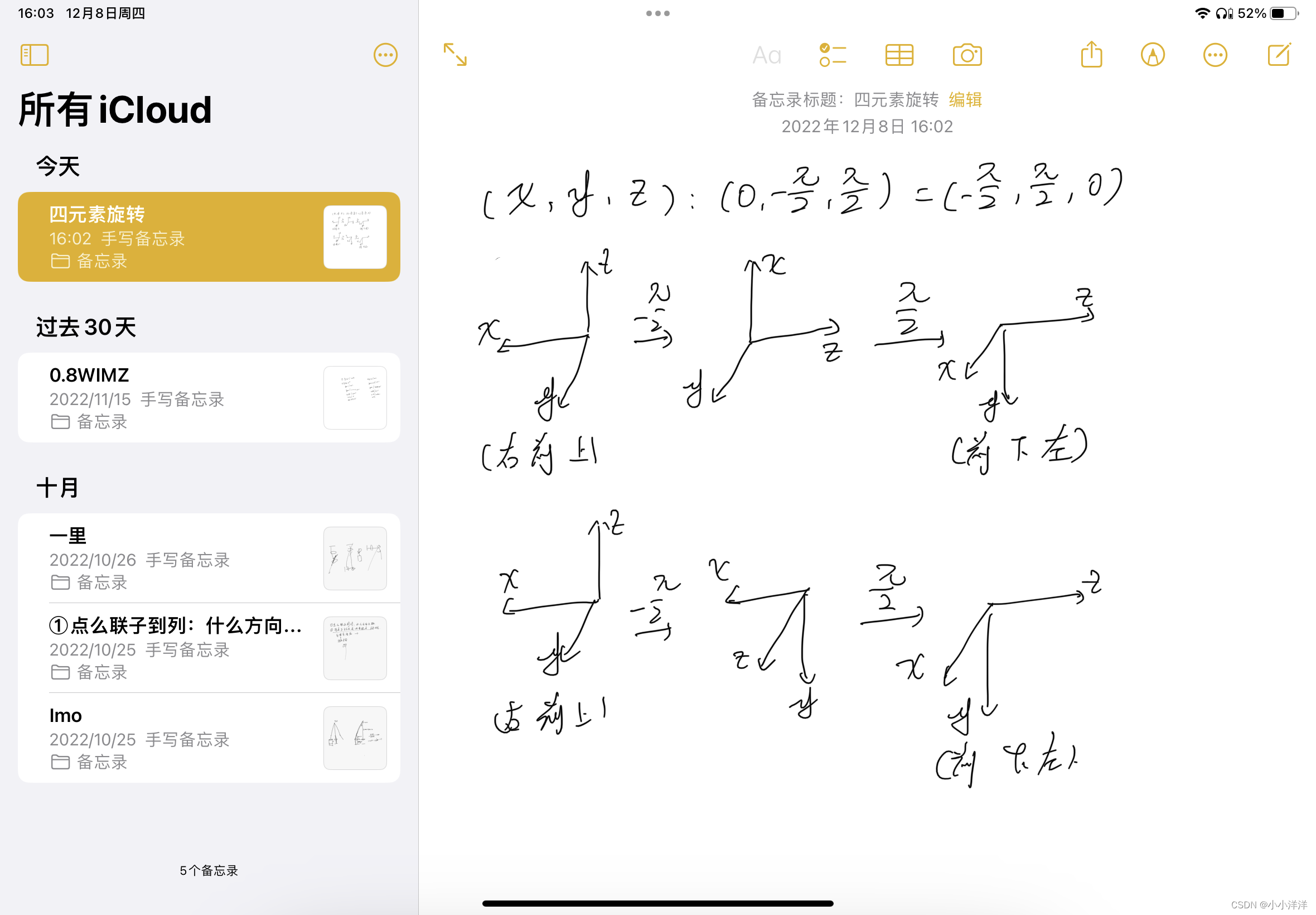
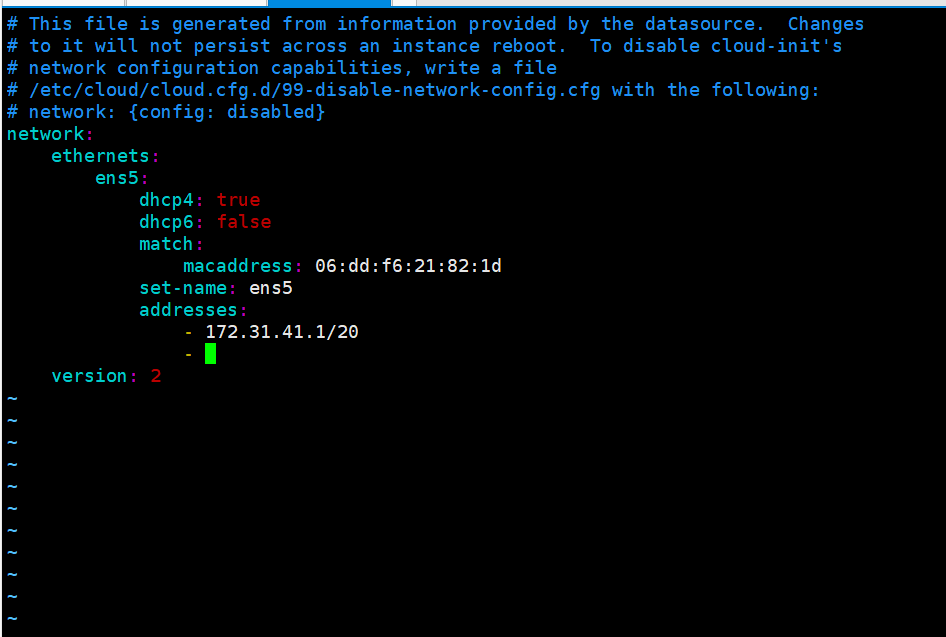
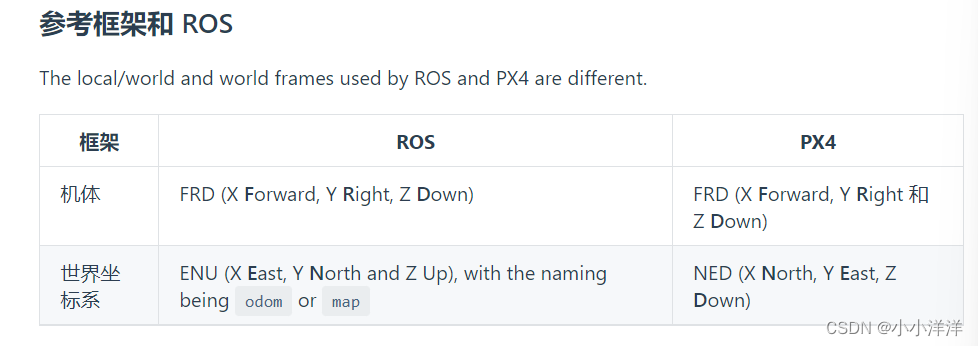
- 如果按照imu可能的前左上(确定是FLU了,根据https://zhuanlan.zhihu.com/p/410800248得到),转换回去的视觉是下前右。到底是什么呢,再来思考下。imu这边默认是东北天吧,在ENU坐标系中,X轴为正东方向,Y轴为正北方向,Z轴向上,单位为米。
- 在px4官网中提到,将外部的定位方式转换为NED的方式,即北东地,但这个是PX4自己的,不是MAVROS的。同样上述链接中,存在存在mavros坐标系的描述,如下:。表明MAVROS的坐标是FRD,需要转换成这样吗?
四、总结
- mavros使用RTK定位,坐标是ENU;
- 正式确定,imu_data的坐标方向未FLU(同样也是ENU东北天,加速度和旋转),即前面为x,左边为y,上面为z。在初始化的时候,可能出现w为负数的情况,这里要注意了,当w为负数,所有的xyz因为都乘上了w才得到的,所有xyz的方向会被认为是反过来了。当绕z轴转360°就会发现所有的都回来了。
- 上述对于四元素的定义有问题,实际为如下。这样四元素的平方和才为1,并且可以表示出不同的旋转方向。当w接近1时,表示角度为0,此时不管绕z轴逆时针还是正时针,w都会减小,但xyz中的sin则表现出正负号,体现出了旋转方向。

- 明天看下vins的旋转坐标系,进行统一……