在 SLAM 中位姿是未知的,而我们需要解决什么样的相机位姿最符合当前观测数据这样的问题。
一种典型的方式是把它构建成一个优化问题,求解最优的 R, t,使得误差最小化。
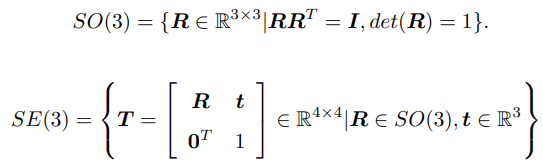
旋转矩阵自身是带有约束的(正交且行列式为 1)。它们作为优化变量时, 会引入额外的约束,使优化变得困难。通过李群——李代数间的转换关系,我们希望把位姿估计变成无约束的优化问题,简化求解方式。
加法不封闭:
乘法封闭:
只有一个运算的集合,我们把它叫做群。
在 SLAM 中位姿是未知的,而我们需要解决什么样的相机位姿最符合当前观测数据这样的问题。
一种典型的方式是把它构建成一个优化问题,求解最优的 R, t,使得误差最小化。
旋转矩阵自身是带有约束的(正交且行列式为 1)。它们作为优化变量时, 会引入额外的约束,使优化变得困难。通过李群——李代数间的转换关系,我们希望把位姿估计变成无约束的优化问题,简化求解方式。
加法不封闭:
乘法封闭:
只有一个运算的集合,我们把它叫做群。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/729043.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!