基于图的路径规划算法对比
- 算法说明与实现效果
- 构造路网
- 路网数据转化为图
- matlab代码
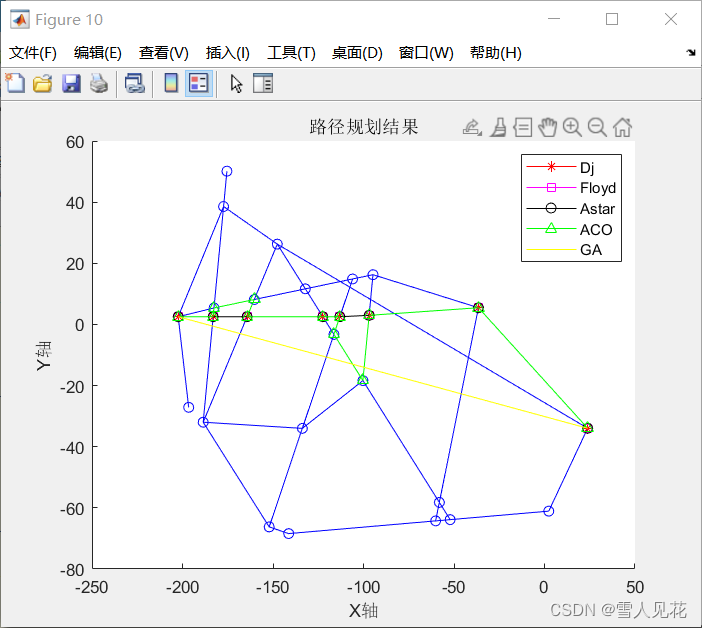
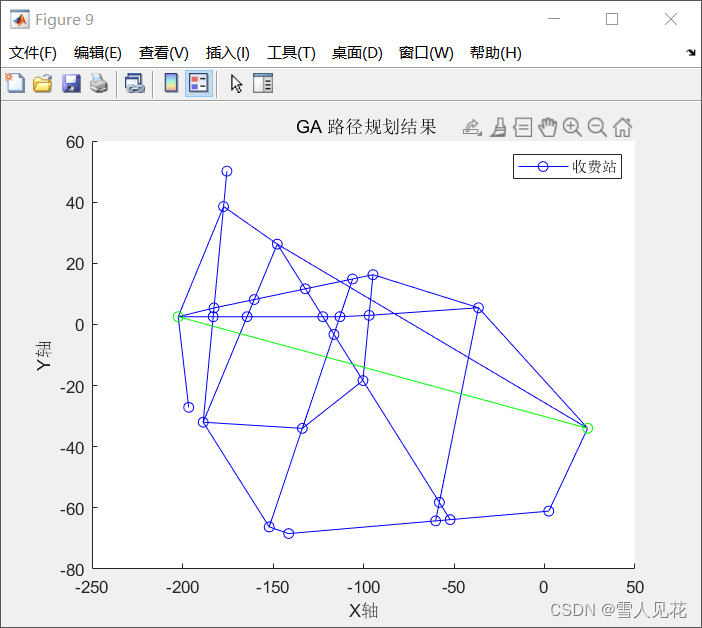
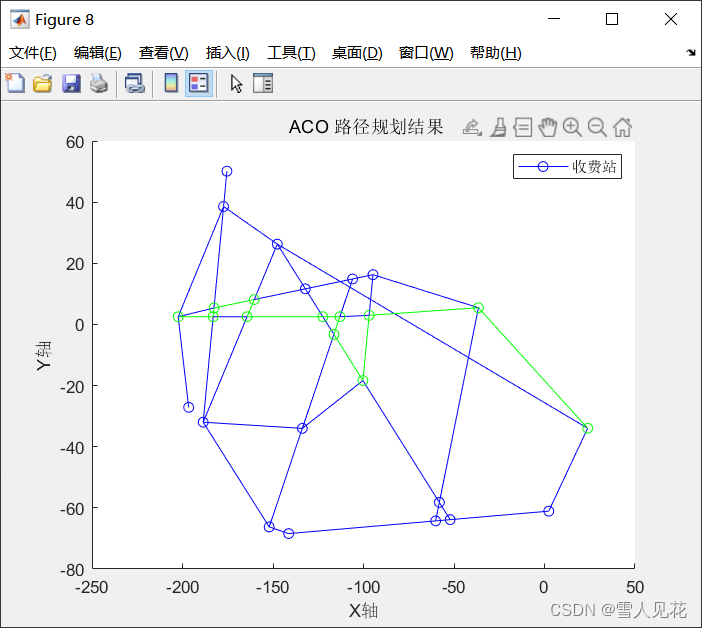
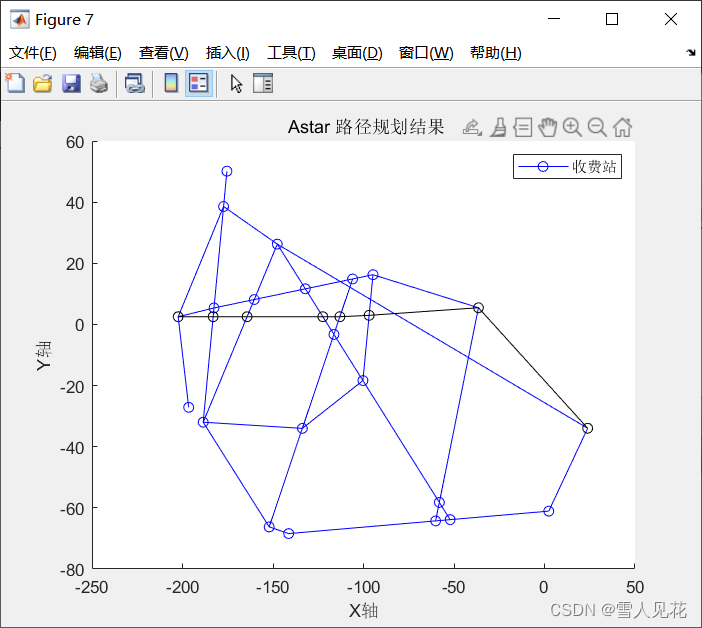
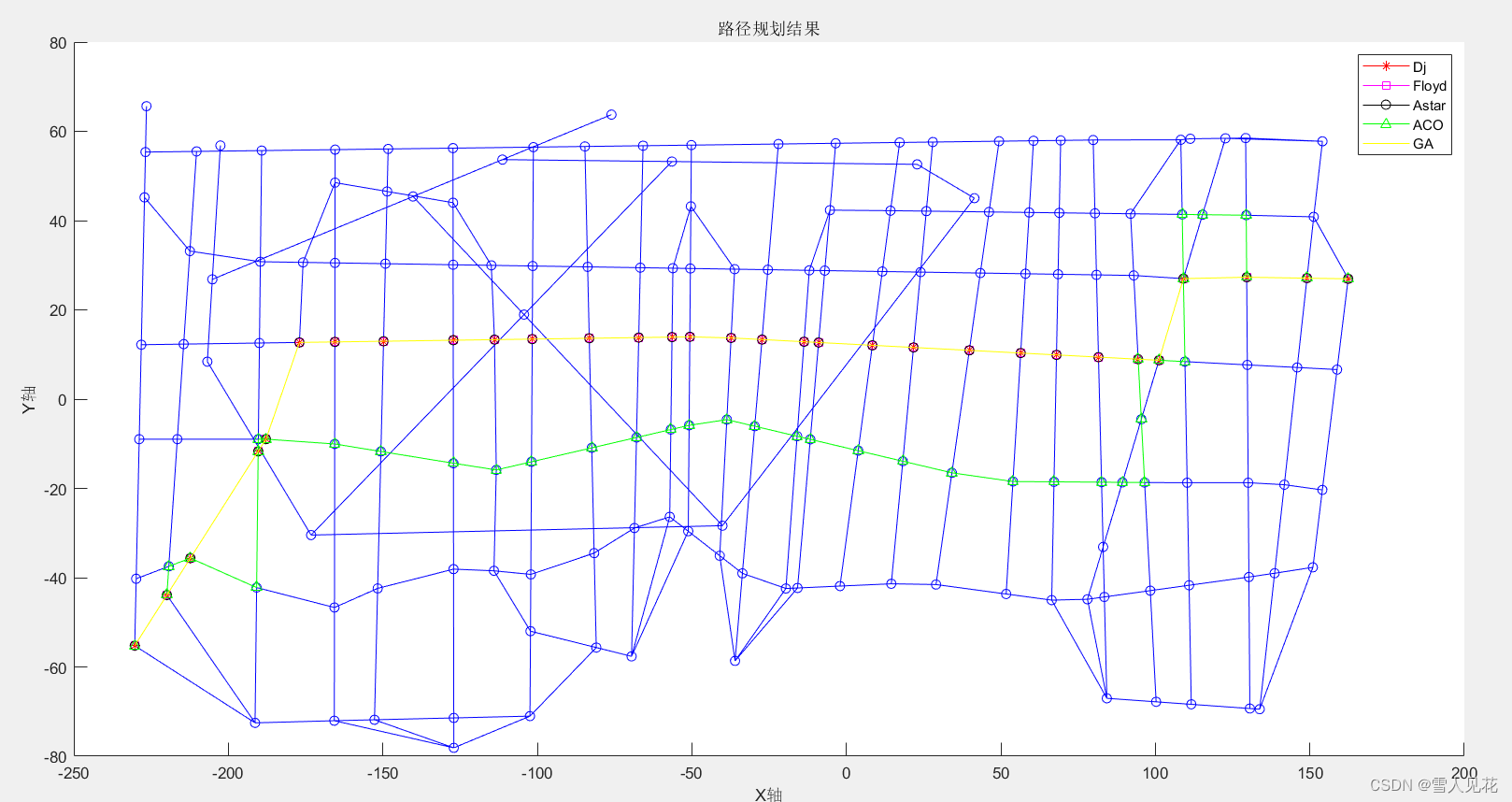
算法说明与实现效果
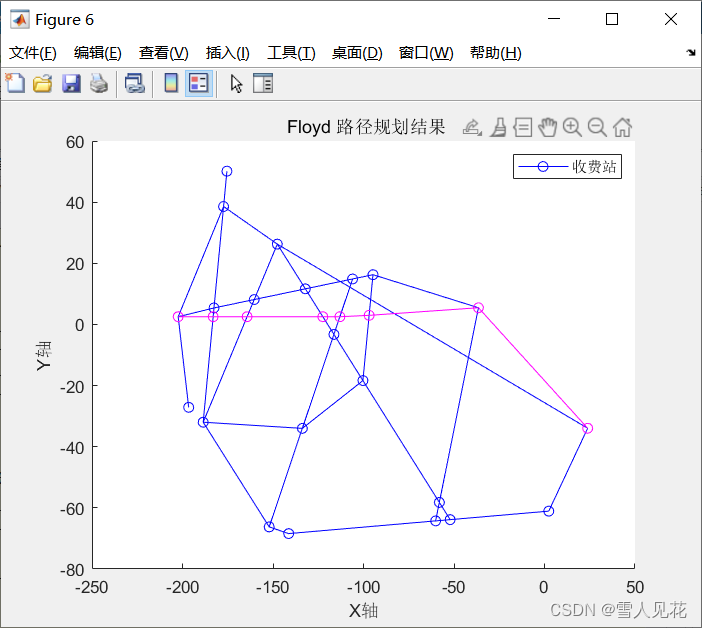
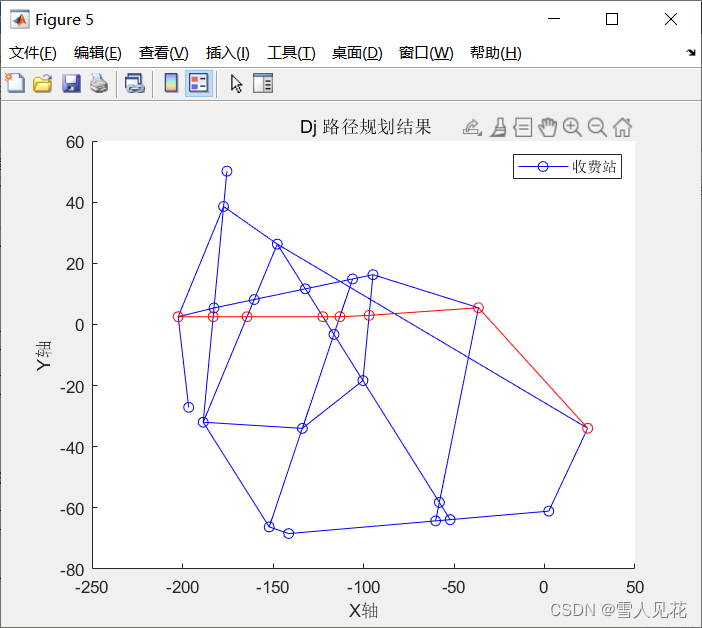
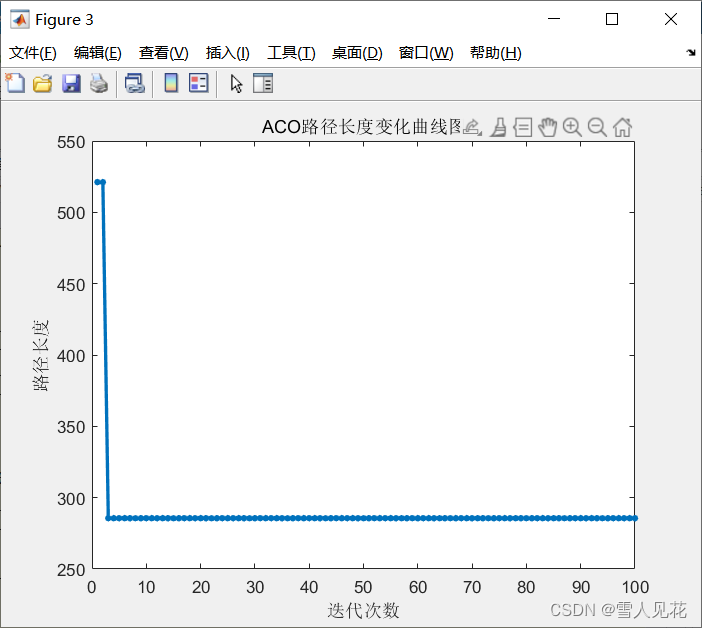
通过构造邻接矩阵,在构造的路网中找到一个节点通向另一个节点的最短路径,包括DJ,Floyd,A*,ACO,GA算法。
路网与一般的无向图不同点是:在一般的无向图中,从起点开始,不论下一次选择哪个节点,最终都可以到达目标节点;而路网中存在死路,即算法需要回溯才能找到正确的通路。
一般的无向图:
100个节点的路网中的路径规划:
1000个节点的路网中的路径规划:
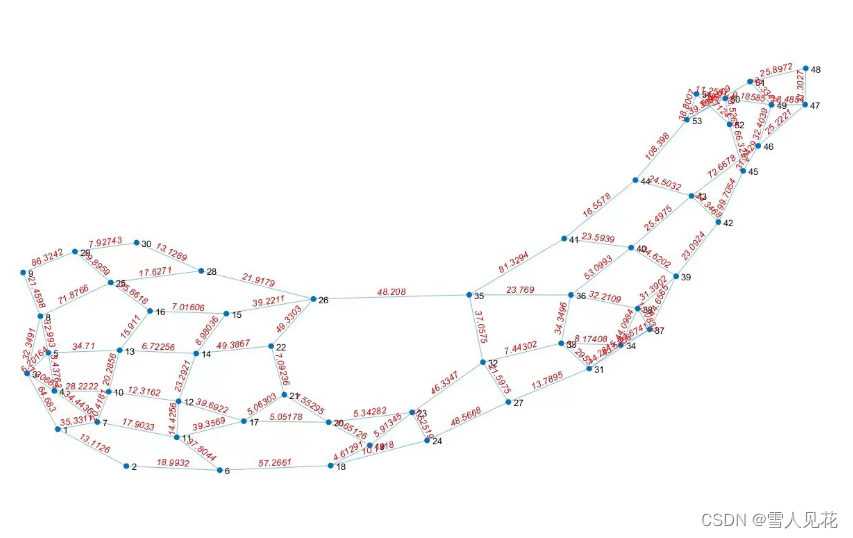
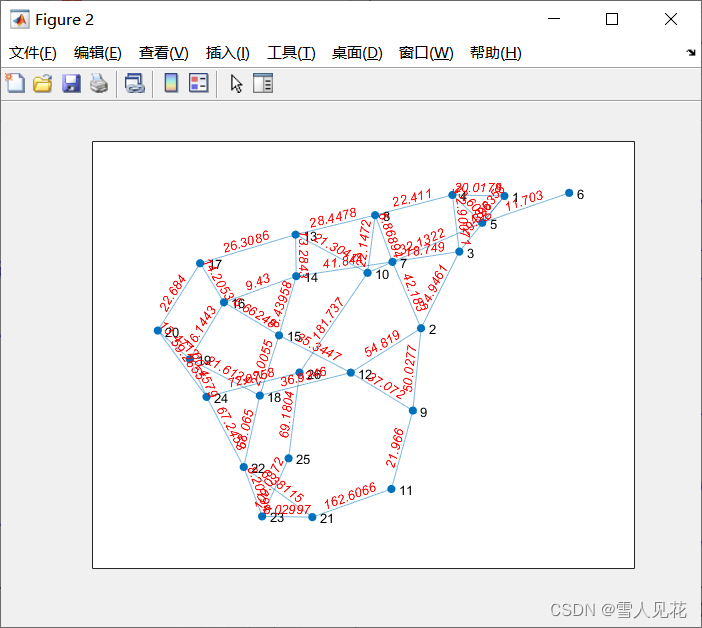
根据路网生成的带权无向图:
构造路网
1、电脑上打开软件:ArcMap
2、右键ArcCatalog中文件夹链接下的目录,依次选择“新建”->“Shapefile”
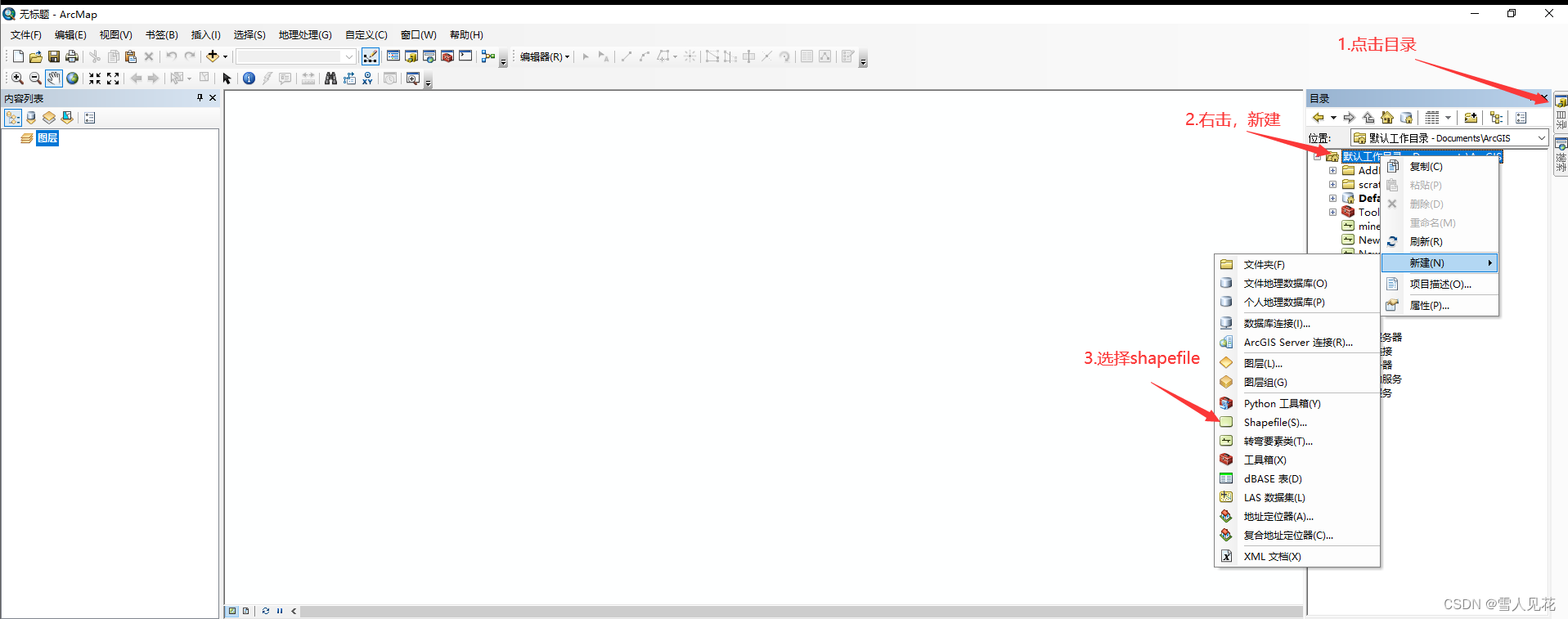
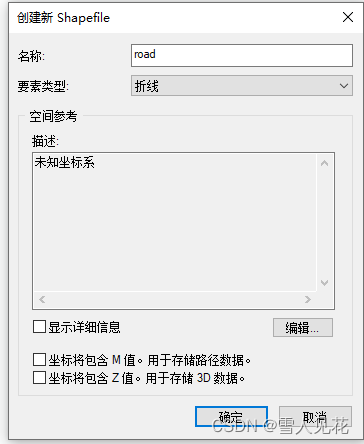
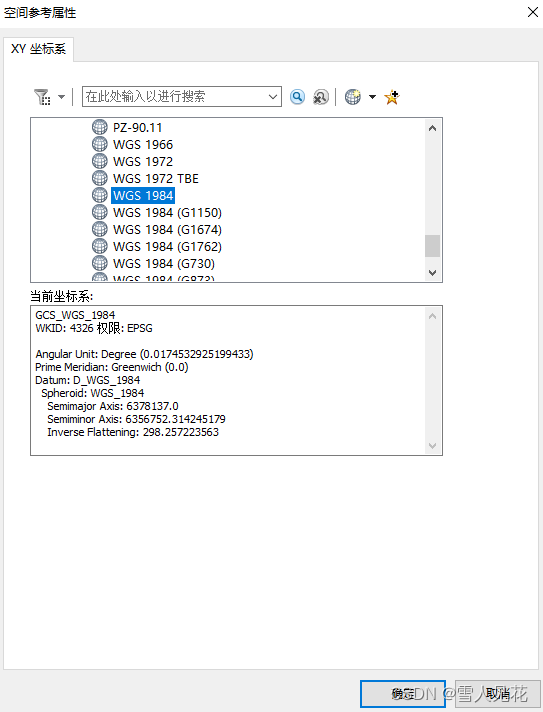
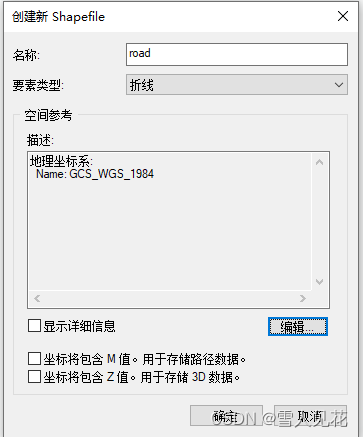
3.在弹出的创建新Shapefile对话框中,填写文件名称,选择要素类型为“折线”,点击“编辑”,弹出空间参考属性对话框,选择XY坐标系:地理坐标系->world->WGS 1984,最后点击“确定”,坐标将包含M值”和“坐标将包含Z值”千万不要勾选,否则后面路网数据处理过程中会报错,最后点击“确定”
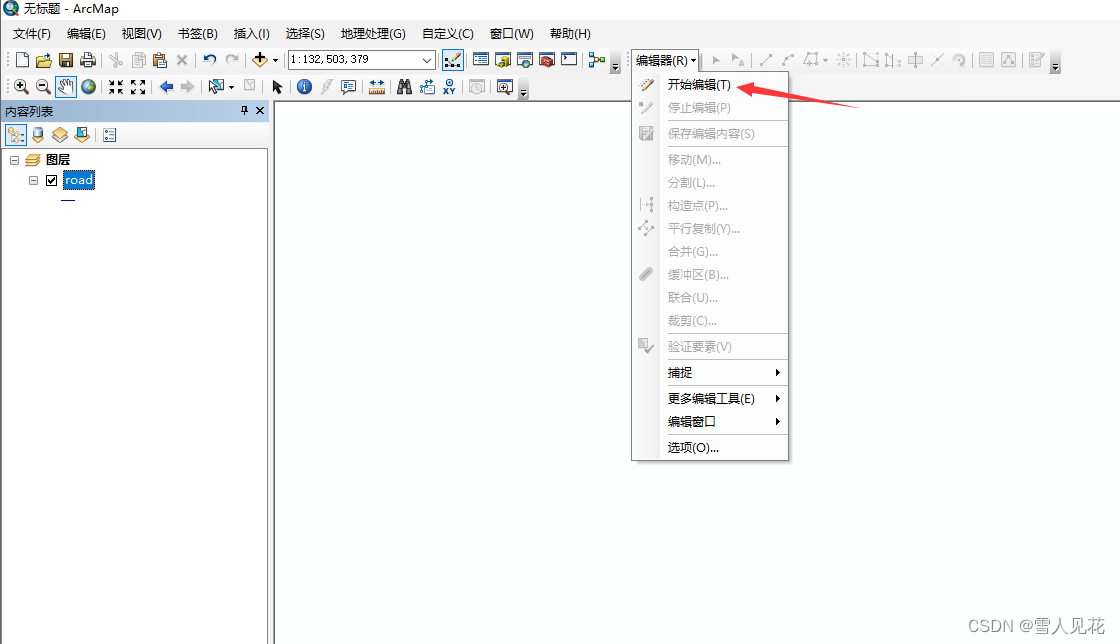
4.左侧图层中出现了我们刚新增的Shapefile线类型图层,我们依次点击“编辑器”->“开始编辑”
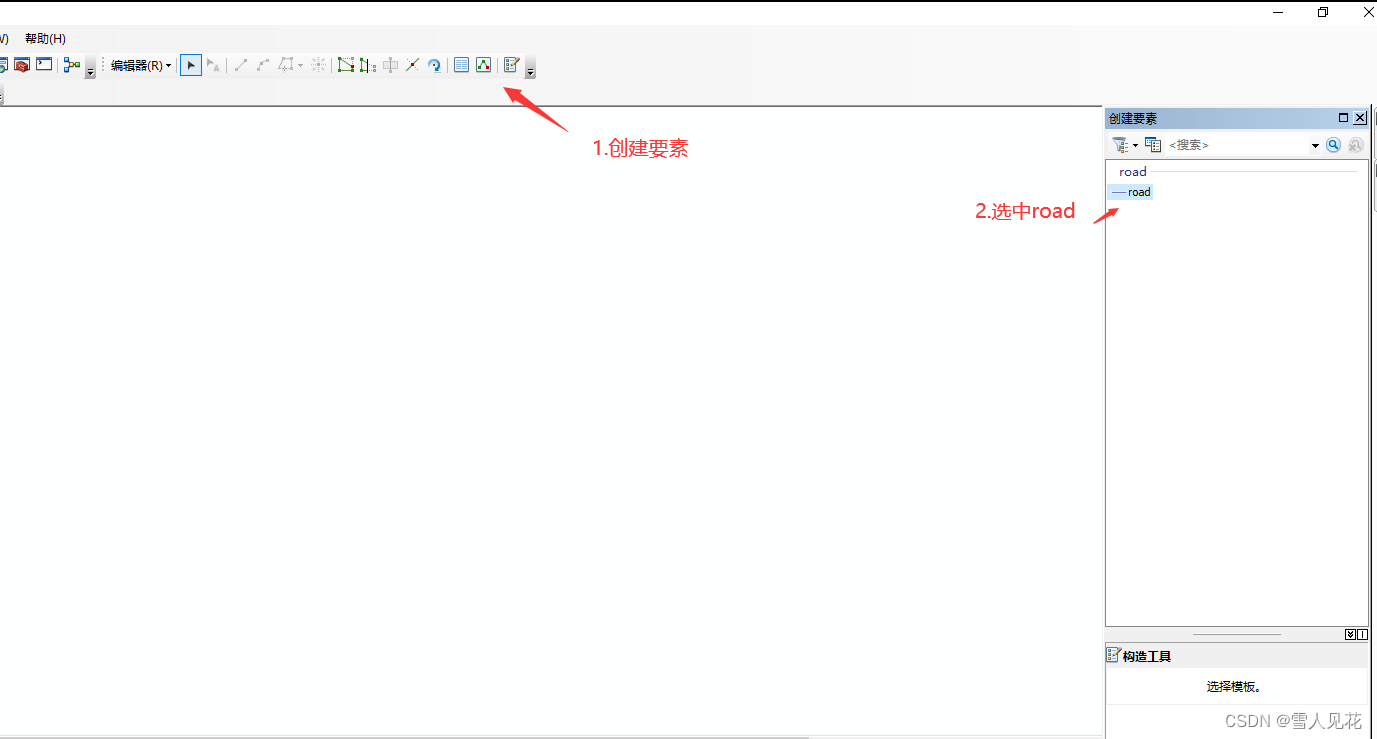
5.点击‘创建要素’,在右边侧栏中选中创建的文件,之后开始编辑
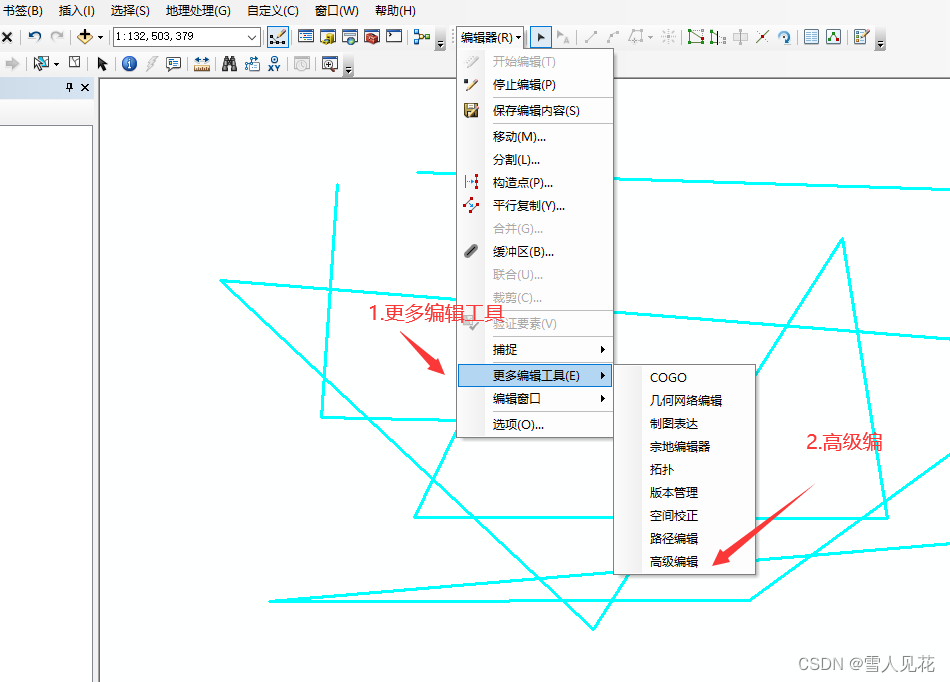
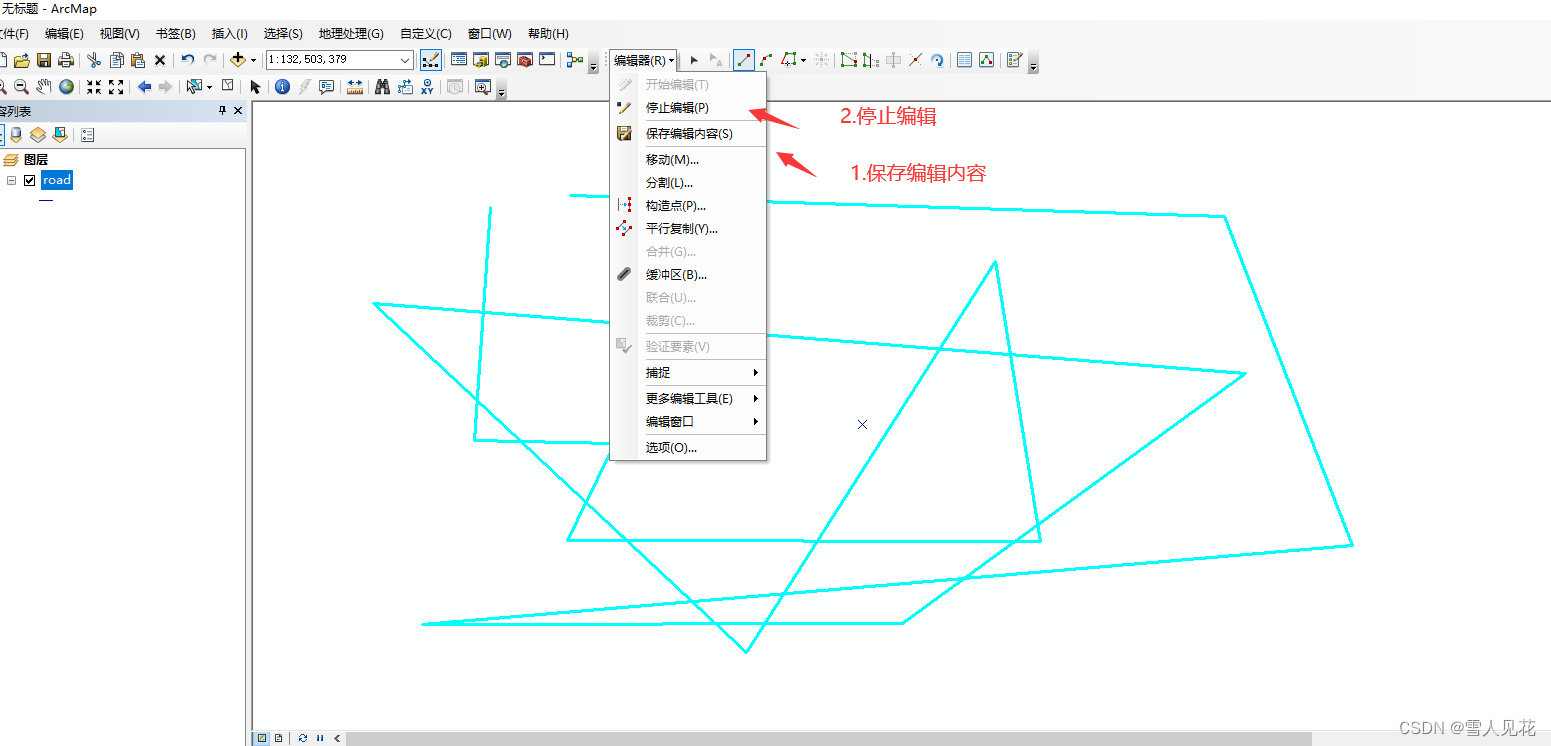
6.绘制编辑完道路数据后,依次点击工具栏中的“编辑器”->“更多编辑工具”->“高级编辑”,选中全部要素,然后点击高级编辑工具栏中的“打断相交线”
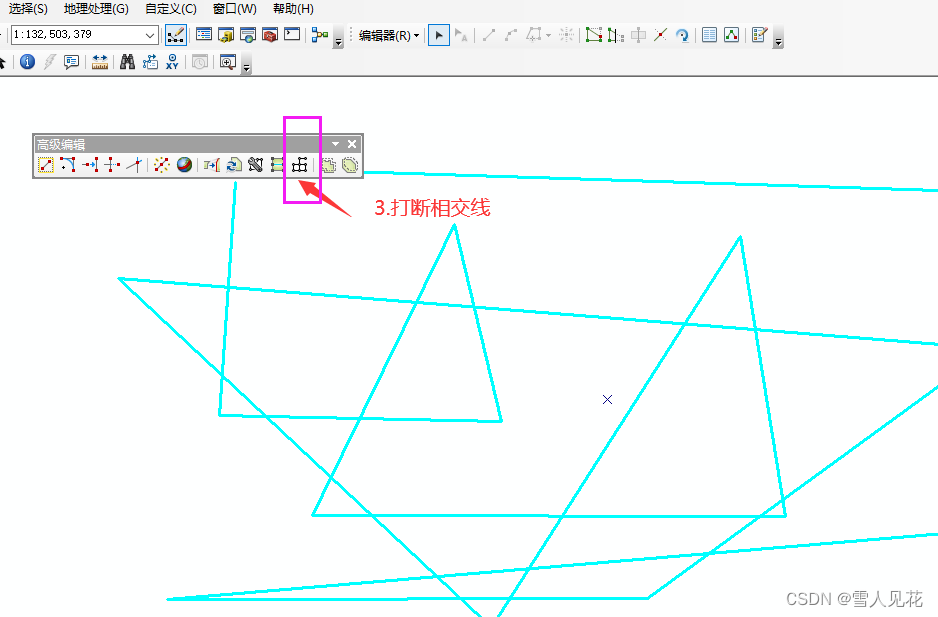
7.打断完成之后,依次点击“保存编辑内容”->“停止编辑”
注:若打断失败可以重启arcmap,重新新建文件,以上步骤重新来一次!!!
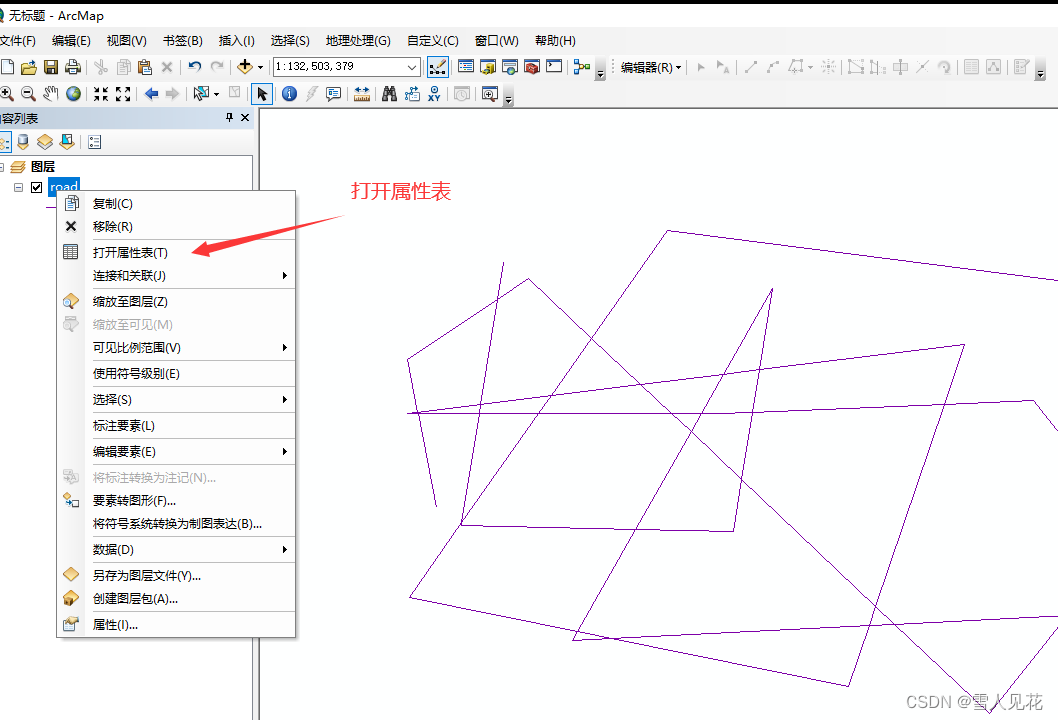
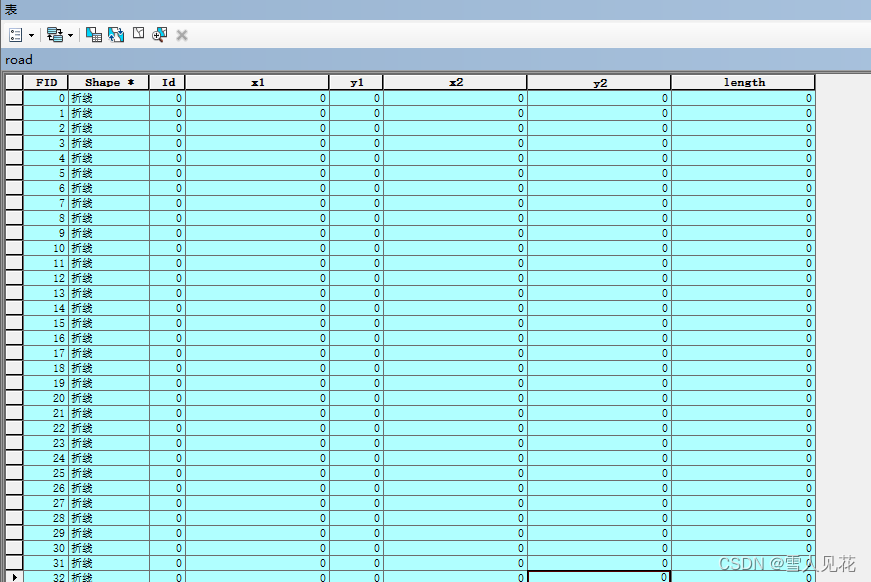
8.打开图层属性表
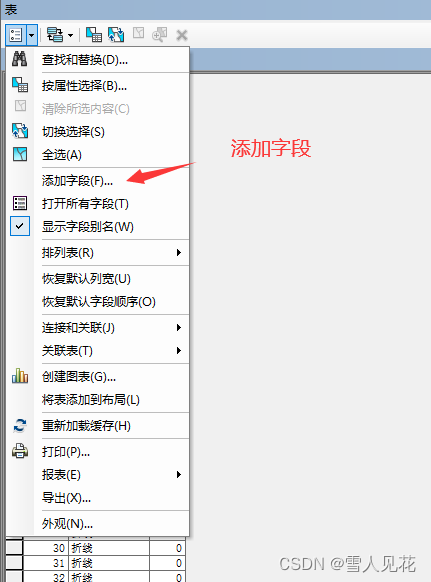
9.添加点与路径长度的字段
注:一定要保证‘停止编辑’了,才可以更改字段
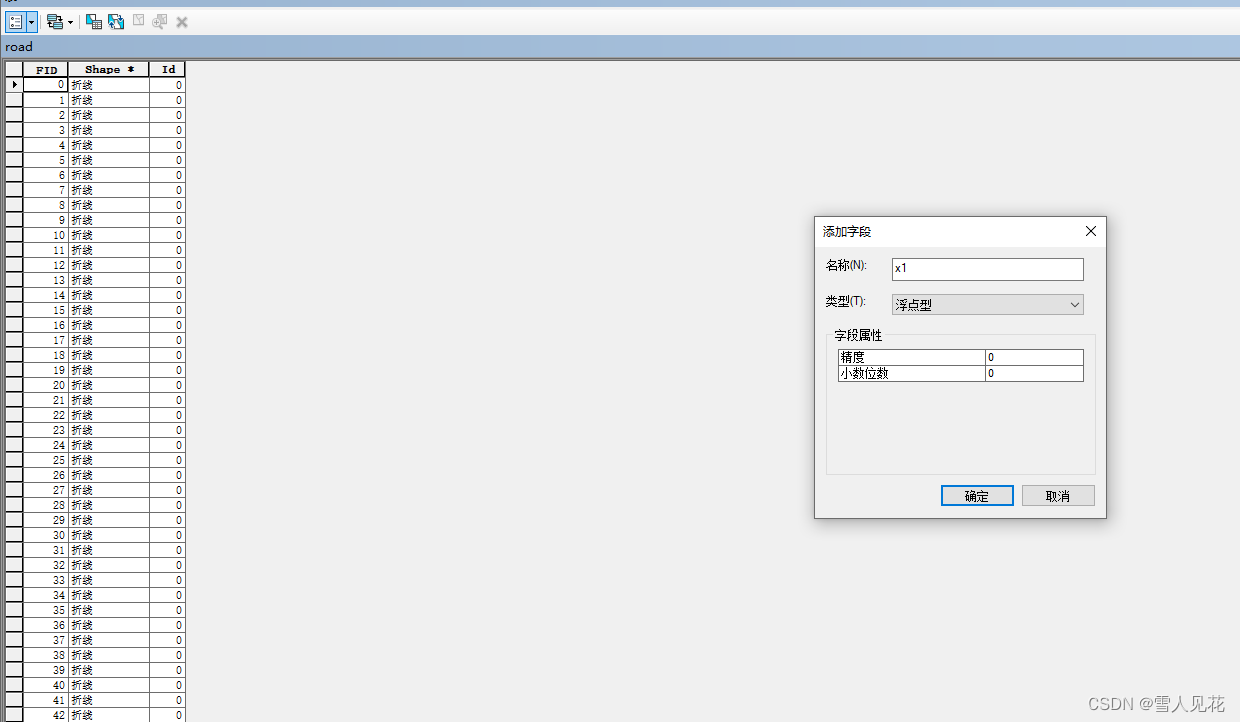
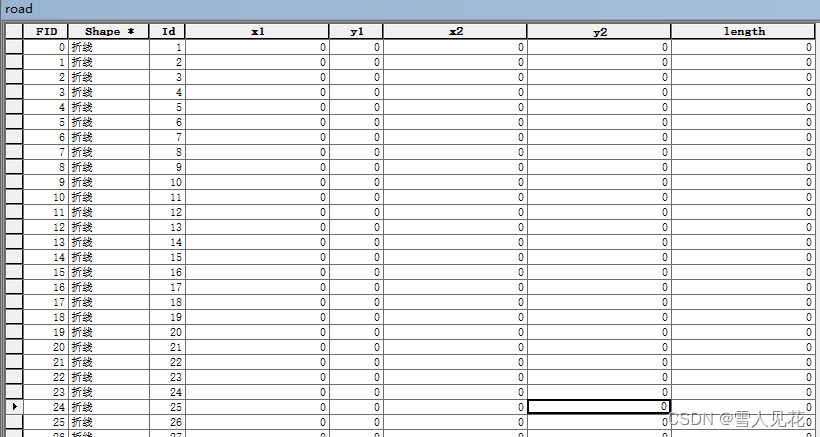
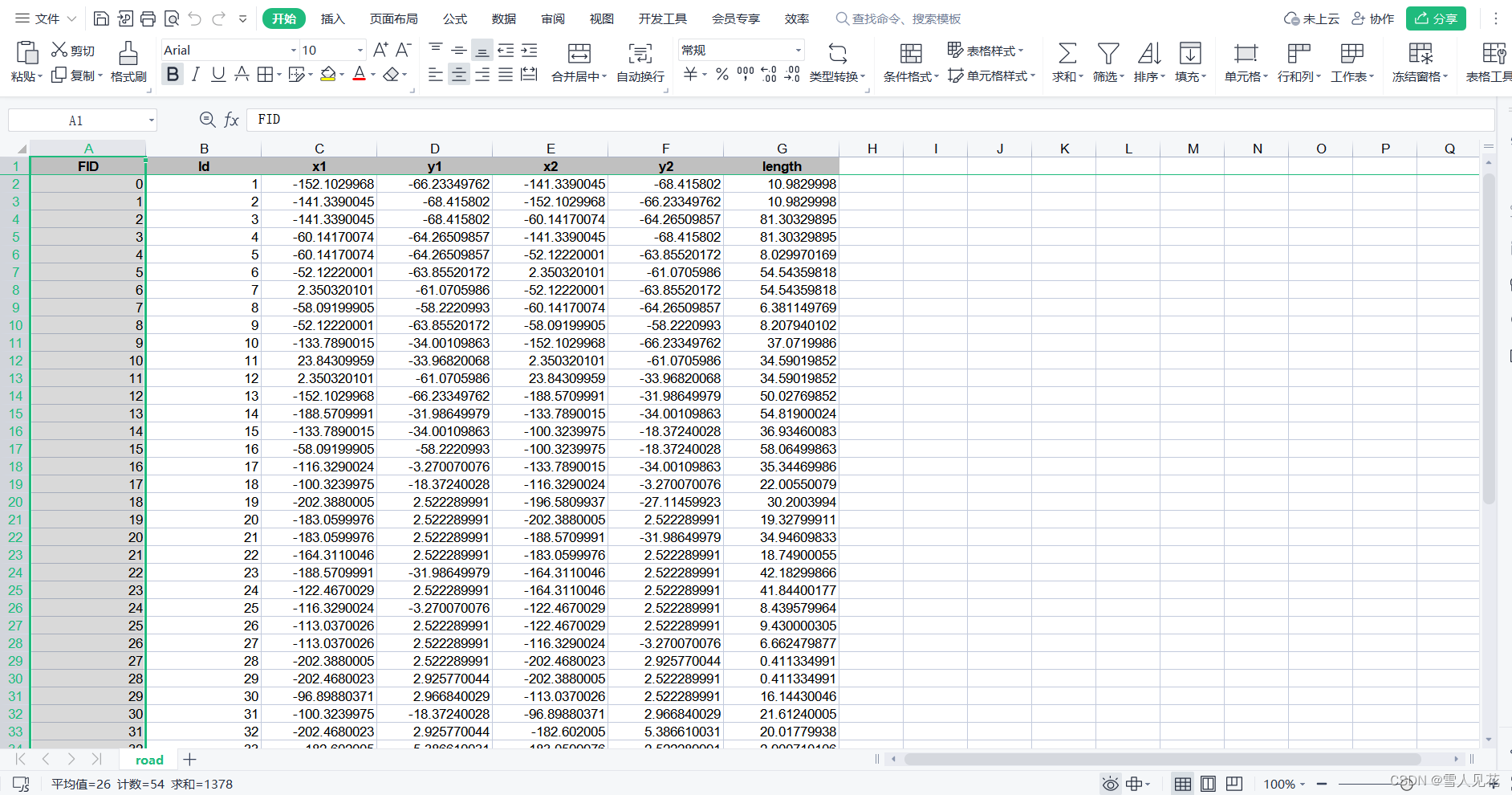
10.添加完成后的字段如下表所示
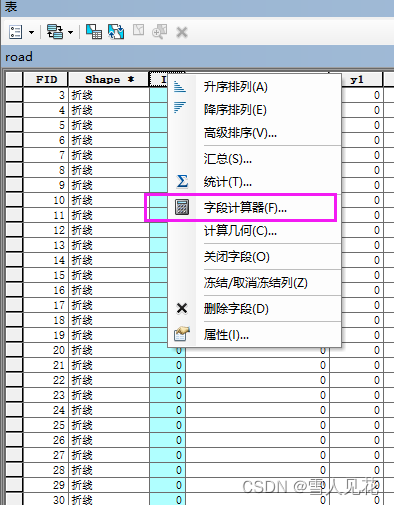
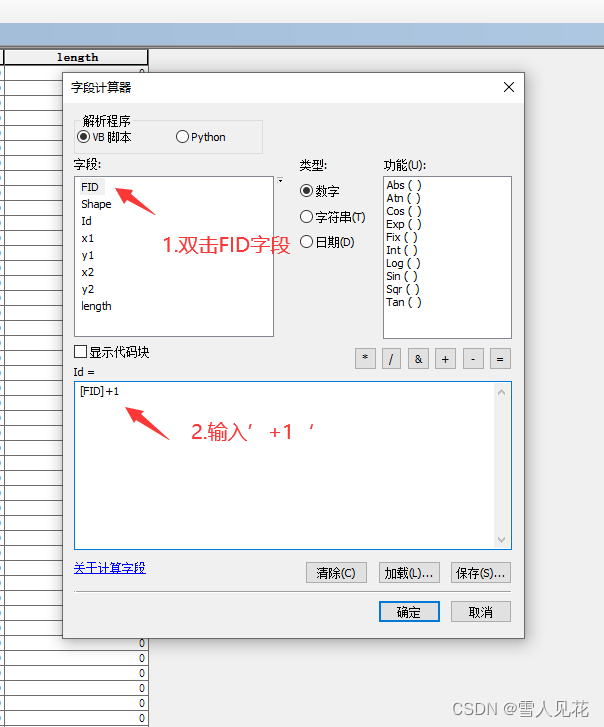
11.计算字段id的内容:右键Id字段,选择“字段计算器”,在字段计算器中,给Id进行重新计算赋值,双击FID字段,然后点击+,再输入数字1即可
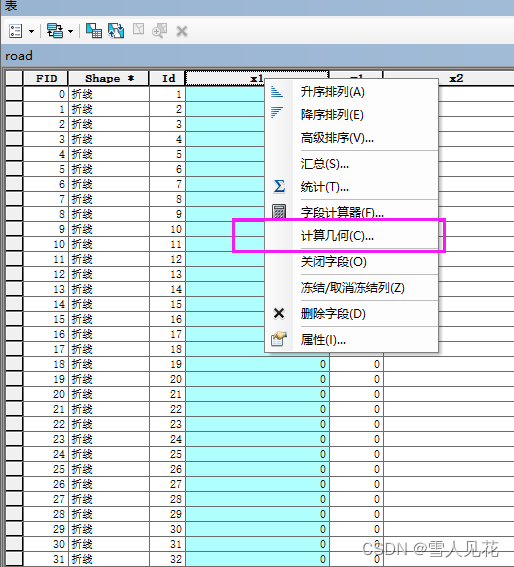
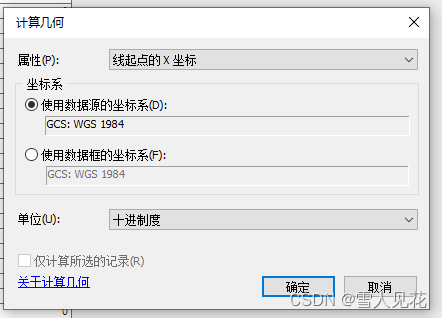
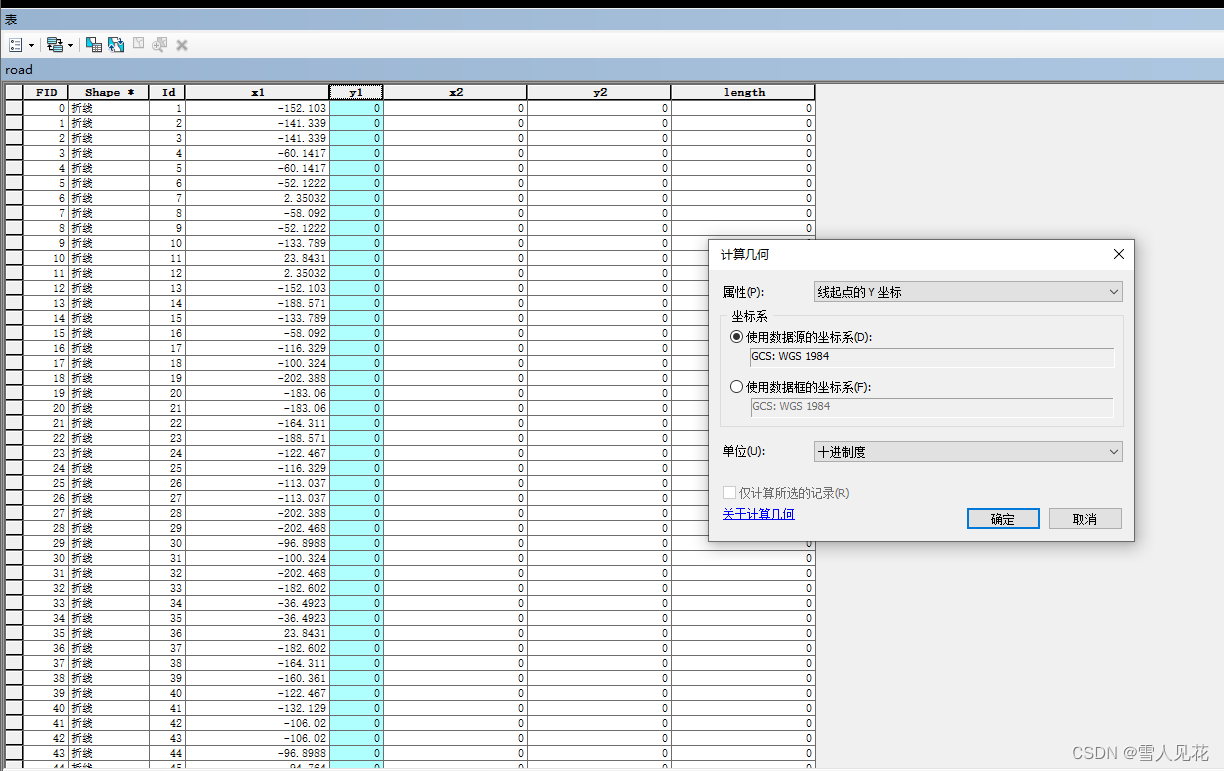
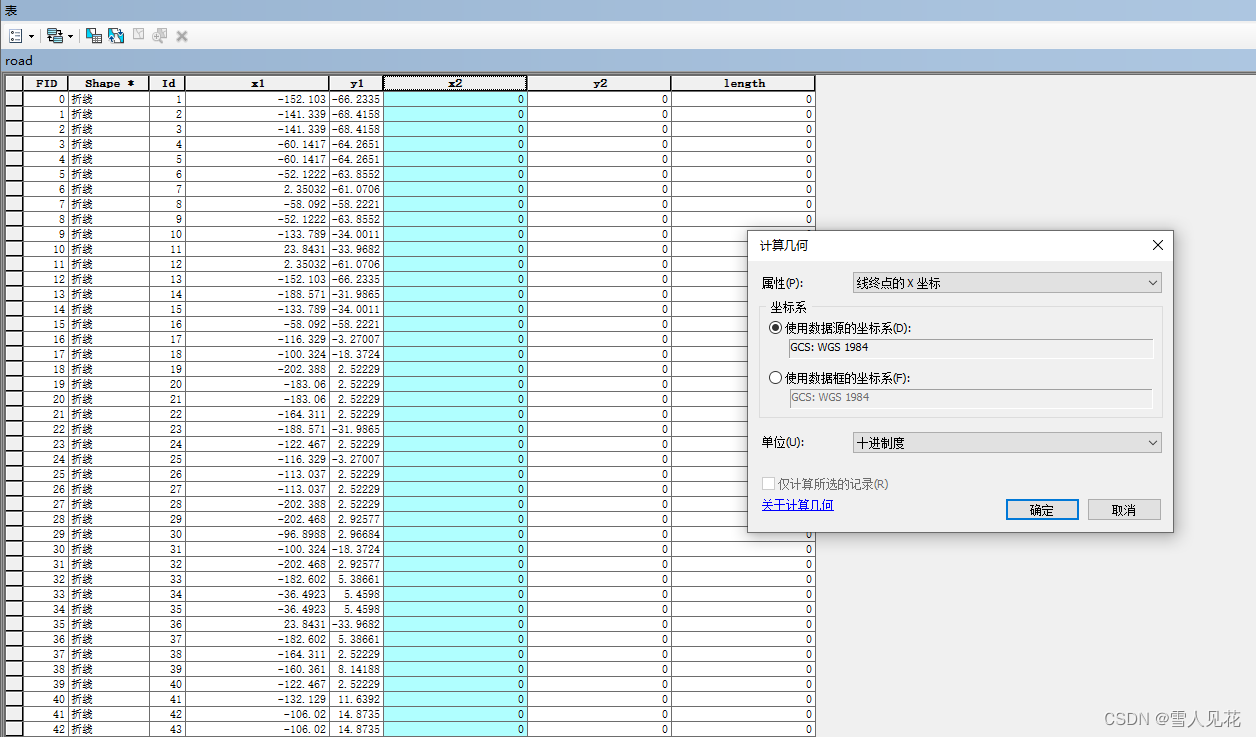
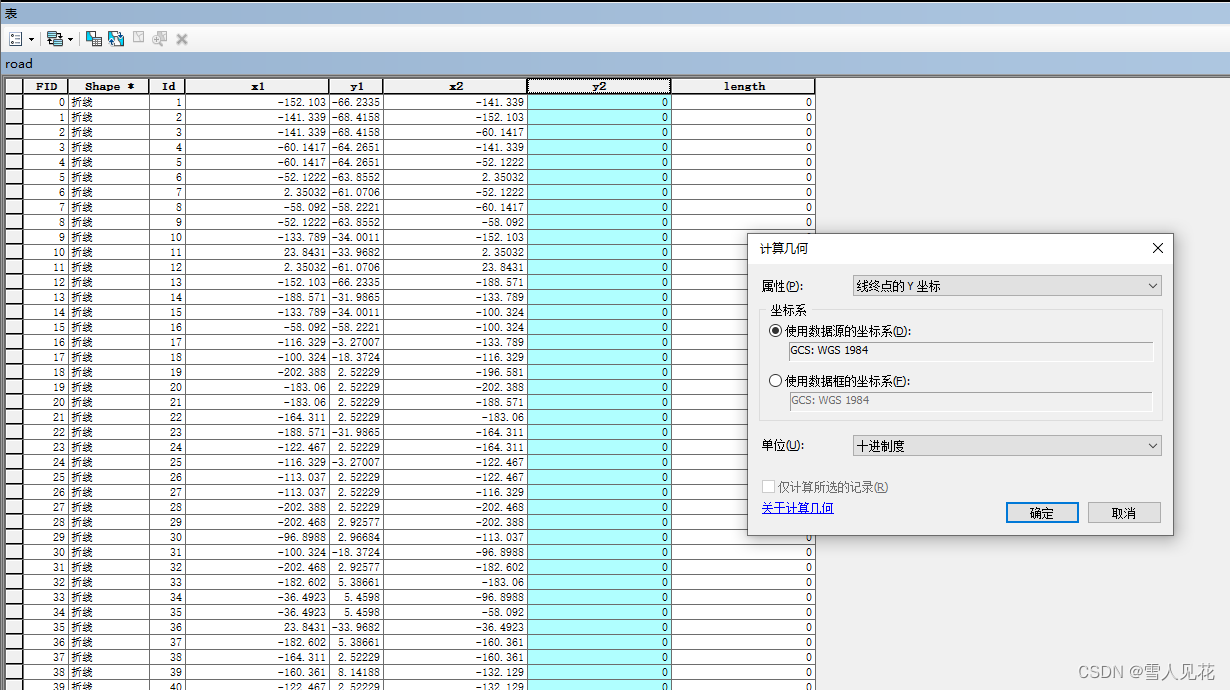
12.计算x1,y1,x2,y2字段:选中列x1并右击,选择‘计算几何’,选择‘线起点的x坐标’,点击确定,其余的y1,x2,y2同理
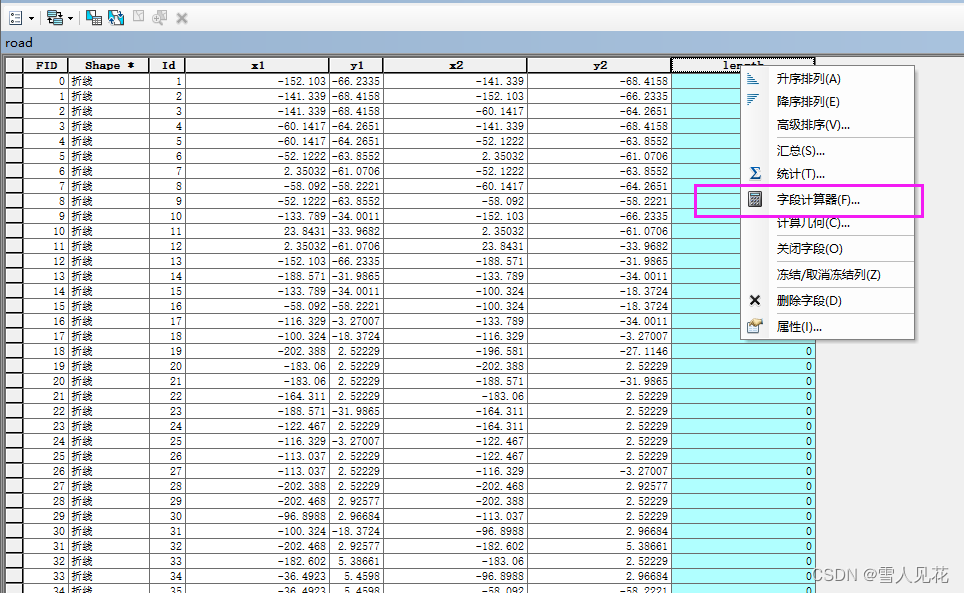
13.计算length字段,即计算路径长度:选中length列->选择字段计算器
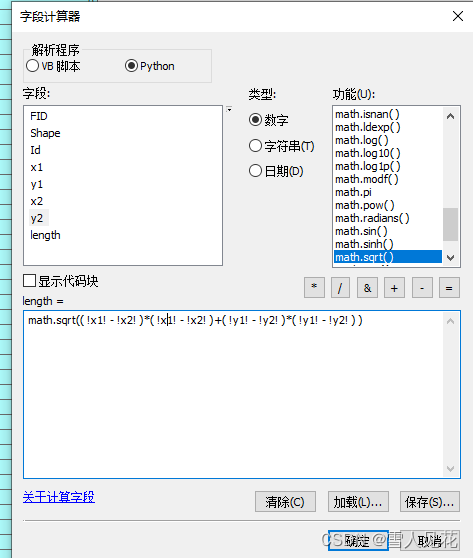
14.选择python,输入以下内容计算路径长度,点击确定
math.sqrt(( !x1! - !x2! )*( !x1! - !x2! )+( !y1! - !y2! )*( !y1! - !y2! ) )
15.导出路网数据
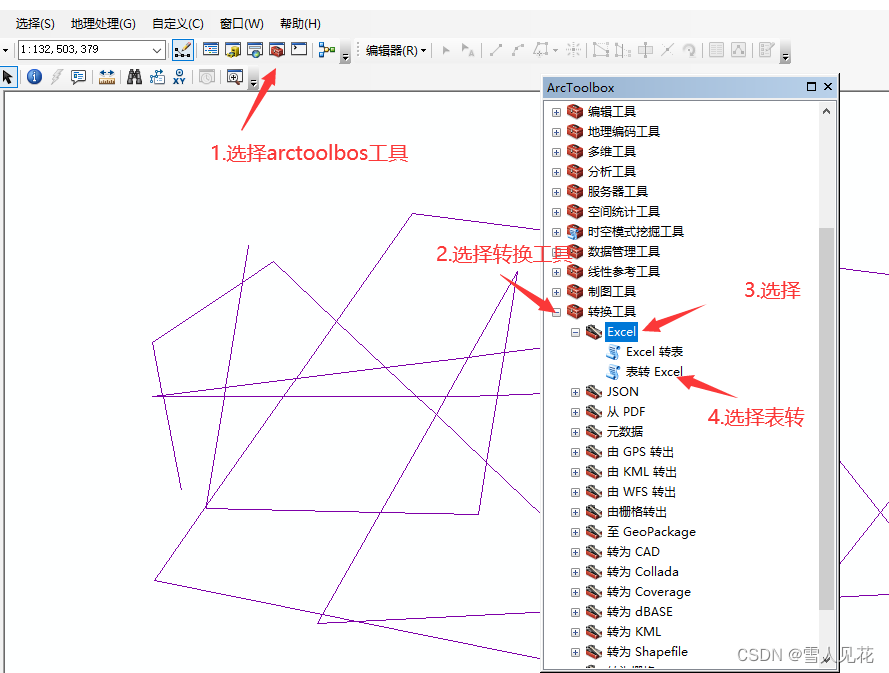
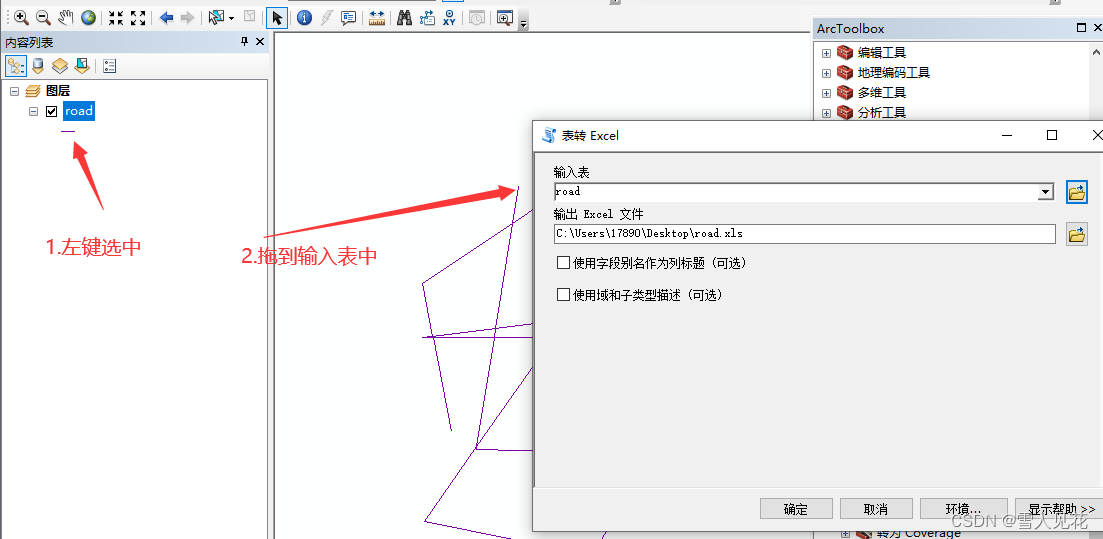
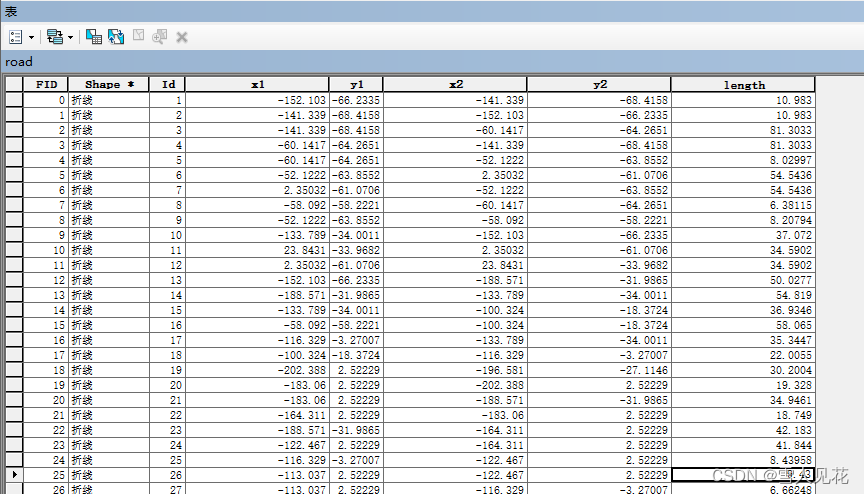
16.查看最终的路网数据
路网数据转化为图
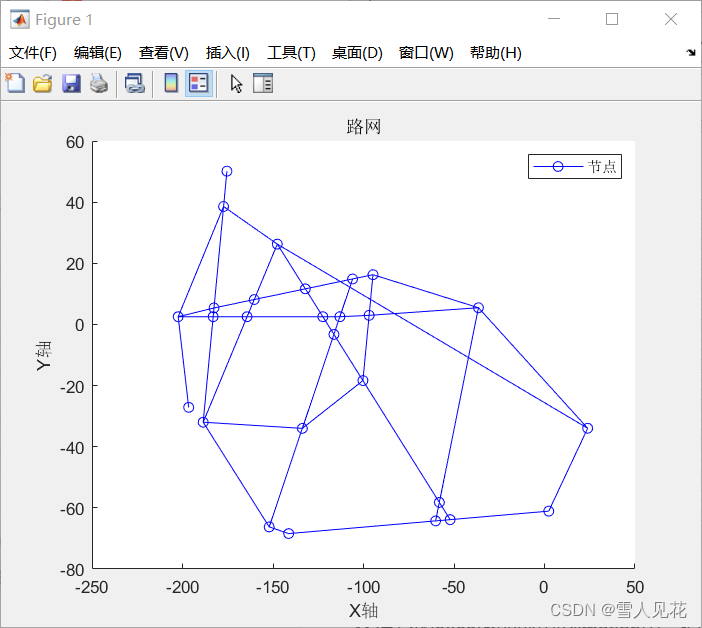
将保存的excel数据加载到matlab中,编写并运行以下的matlab代码,得到路网与图
路网:
无向带权图:
matlab代码
(1)将原始road数据转化为图和邻接矩阵的matlab代码
%% 函数功能:
%(1)读取arcmap数据,进行点合并,绘制路网图,保存处理后的数据
%(2)坐标编号,坐标关系转化为点关系,根据点关系得到邻接矩阵
%(3)根据邻接矩阵构造图
%data属性:fid id x1 y1 x2 y2 length
%% 返回值:
%A:邻接矩阵
%G:无向图
%data:原始数据的所有坐标
%uniqueValues:不重复的节点坐标及其对应的唯一id
%% 读取数据
%文件名
filename = 'road.xls';
% 指定要读取的文件名和工作表名
sheet = 1; % 第一个工作表
% 使用xlsread函数读取数据 header为列名称
[data, header] = xlsread(filename, sheet);
data=data(:,2:7);%读取列
%data属性:id x1 y1 x2 y2 length
name_id = data(:,1);%记录id
start_point=data(:,2:3);%记录起点坐标x1 y1
end_point=data(:,4:5);%记录终点坐标x2 y2
length_list=data(:,6);%记录路径长度length
%% 处理数据:合并距离很近的点
distanceThreshold=3;%距离阈值,两点距离小于此阈值则合并两个点
numNodes = size(start_point, 1);
for kk = 1:5%通过迭代,不断减少距离阈值
distanceThreshold=distanceThreshold/2;
Preprocessed_data=[];%记录要替换的数据
for i = 1:numNodes
for j = 1:numNodes
if i ~= j
distance1 = norm(start_point(i, :) - start_point(j, :));
if distance1 <= distanceThreshold%两点距离过近
Preprocessed_data=[Preprocessed_data;start_point(i, :),start_point(j, :)];
end
distance2 = norm(end_point(i, :) - end_point(j, :));
if distance2 <= distanceThreshold%两点距离过近
Preprocessed_data=[Preprocessed_data;end_point(i, :),end_point(j, :)];
end
distance3 = norm(start_point(i, :) - end_point(j, :));
if distance3 <= distanceThreshold%两点距离过近
Preprocessed_data=[Preprocessed_data;start_point(i, :),end_point(j, :)];
end
end
end
end%for
%根据记录处理原始数据
for i = 1:size(data,1)
for j = 1:size(Preprocessed_data,1)
if data(i,2)==Preprocessed_data(j,1) && data(i,3)==Preprocessed_data(j,2)
data(i,2)=Preprocessed_data(j,3);
data(i,3)=Preprocessed_data(j,4);
end
if data(i,4)==Preprocessed_data(j,1) && data(i,5)==Preprocessed_data(j,2)
data(i,4)=Preprocessed_data(j,3);
data(i,5)=Preprocessed_data(j,4);
end
end
end%for
%重新读取数据
name_id = data(:,1);%记录id
start_point=data(:,2:3);%记录起点坐标
end_point=data(:,4:5);%记录终点坐标
length_list=data(:,6);%记录路径长度
end
% %重新计算路径长度
% data(:,6) = norm(data(:,2:3) - data(:, 4:5));
%% 绘制路网
figure(1);
hold on;
% 逐个连接起点和终点
for i = 1:size(start_point, 1)
x = [start_point(i, 1), end_point(i, 1)];
y = [start_point(i, 2), end_point(i, 2)];
distance=sqrt((start_point(i, 1)-start_point(i, 2))^2+(end_point(i, 1)-end_point(i, 2))^2);
if distance>0.1%两点距离过近则删除
% text(start_point(i, 1),start_point(i, 2),num2str(i),'color','r','FontSize', 12);%图上打上名称
plot(x, y, 'b-o'); % 使用蓝色圆形标记连线
end
end
% 设置坐标轴范围和标签
xlabel('X轴');
ylabel('Y轴');
% 添加标题和图例
title('路网');
legend('节点');
hold off;
%% 保存数据到表格
% 创建表格
T = array2table(data, 'VariableNames', {'Id', 'x1', 'y1','x2','y2','length'});
% 保存表格数据到 CSV 文件
filename = 'data.csv';
writetable(T, filename);
%% 二维数组去重值,计算剩余的节点数
uniqueValues = unique(data(:,2:3), 'rows');
node_length = size(uniqueValues,1);
fprintf('路网中包含节点的数目为:%d \n\n',node_length)
%% 给数据的坐标编号,使每个坐标具有唯一id
for i = 1:node_length
uniqueValues(i,3)=i;
end
%% 将data数据中的点的关系转化为id的关系
new_data = zeros(size(data,1),3);
for i = 1:size(data,1)
for j = 1:size(uniqueValues,1)
if data(i,2)==uniqueValues(j,1) && data(i,3)==uniqueValues(j,2)
new_data(i,1)=uniqueValues(j,3);
end
if data(i,4)==uniqueValues(j,1) && data(i,5)==uniqueValues(j,2)
new_data(i,2)=uniqueValues(j,3);
end
end
end
new_data(:,3)=data(:,6);%载入路径权值,即路径长度
save('data.mat', 'new_data');
%% 根据id的关系绘制邻接矩阵
edges=new_data(:,1:2);%载入边的关系
% 提取节点数量
numNodes = max(edges(:));
% 创建空的邻接矩阵
adjMatrix = zeros(numNodes);
% 根据边关系设置邻接矩阵
numEdges = size(edges, 1);
for i = 1:numEdges
startNode = edges(i, 1);
endNode = edges(i, 2);
if startNode==0 ||endNode==0
continue
end
adjMatrix(startNode, endNode) = new_data(i, 3);%记录权值
end
A = adjMatrix+adjMatrix';%转置得到对称阵
G = graph(A, 'upper', 'omitselfloops');%创建无向图
figure(2);%开启画图
h = plot(G, 'EdgeLabel', G.Edges.Weight,'EdgeLabelColor','r');
layout(h, 'force'); % 使用强制布局算法进行节点布局
(2)根据邻接矩阵进行二维路径规划的完整matlab代码
https://github.com/XuerenJianhua/Planning
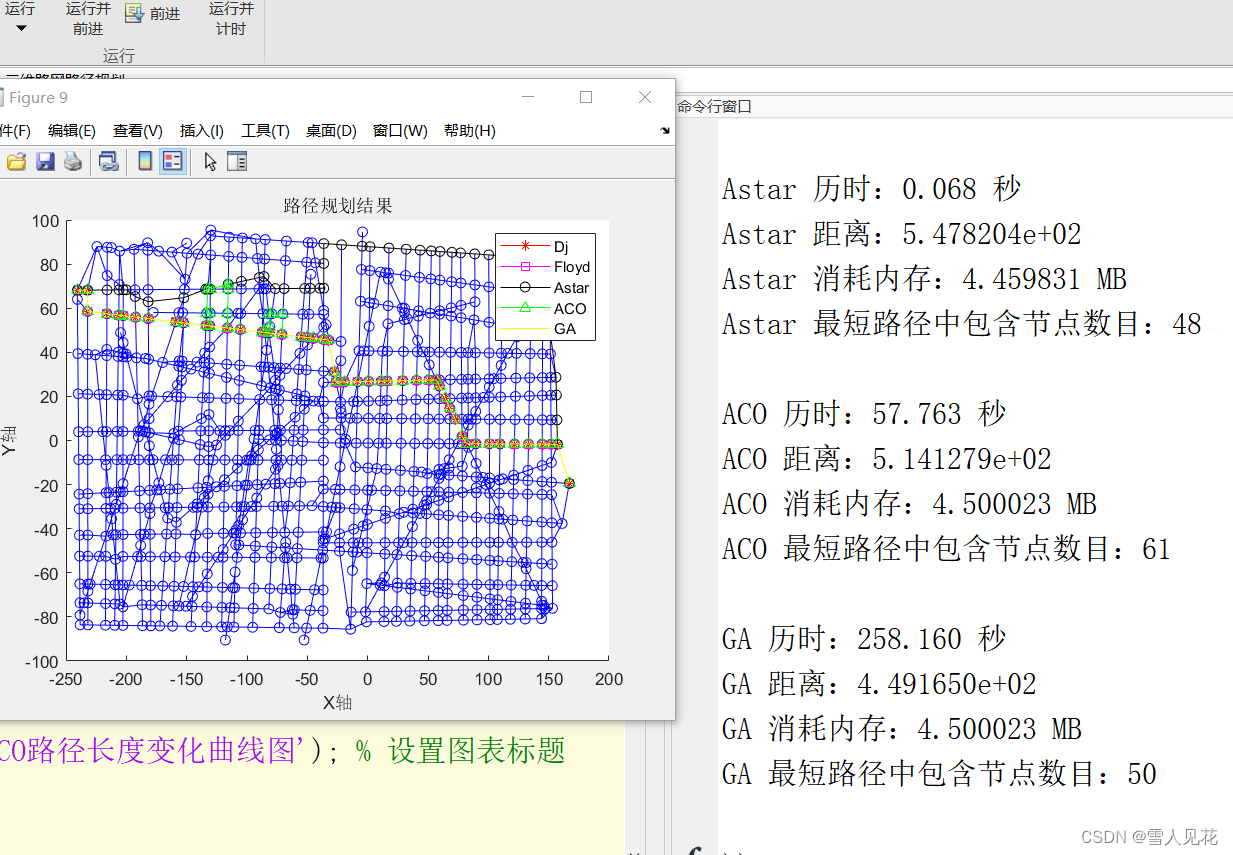
实现效果: