一、 概述
商用车线控底盘主要用于接收智能驾驶域控制器(控制器ADU)的请求指令,完成ADU 对驱动、制动、档位转向、驻车声光等部分的指令控制,从而实现智能驾驶功。 即 ADU 可通过 CAN 通讯的方式以特定周期和指令控制 一台车的线控底盘实现加速、减转向和声光等动作 。
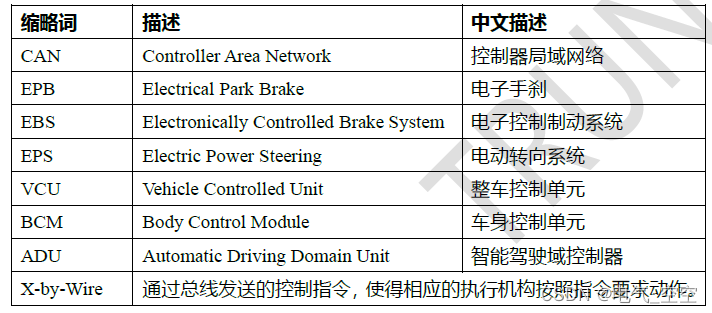
CAN 通信协议符合 J1939标准, 所有 控制指令具有超时和校验处理, CAN总线负载率在合理(建议≤50%)范围内。 线控车辆应包含车规级的线控制动、线控转向、线控驱动、线控档位、线控驻车、线控灯光 、线控雨刮、 线控喇叭控制功能 ,各系统具体参数请照下文要求未提及,各系统具体参数 请照下文要求未提及,各系统具体参数 请照下文要求,未提及可根据实际配置情况提供 。
二、 线控转向系统
线控转向系统( EPS)支持 CAN总线实现转角控制, 根据ADU发送的转向请求响应方向盘转角 请求 ,同时反馈 EPS的状态 ,如实际方向盘转角、驾驶员是否接入等信号,同时提供相应的调用接口及协议要求。
1. 功能需求如下:
(1) 针对自动驾驶控制转向接口应存在转角模式和转矩控制模式 ,至少有转角控制模式;
(2) 转向控制器应有通信安全校验机,如Counter, checksumCounter校验等 ,校验失败不响应请求;
(3) 转角模式下 EPS应有相的驾驶员干预处理机制,如司机介入方向盘扭矩> 5Nm退出等 ;
(4) 可支持人工驾驶转向助力模式和自动驾驶线控转向模式两种方式共存 。
三、 线控制动系统
线控 制动系统(EBS)支持 CAN 总线控制车辆制动减速度, 根据 ADU发送的减速度请求响应 制动请求 , 同时反馈 EBS的状态 ,如制动踏板、减速度信息、轮及车减速 度信息、轮及车减速 度信息、轮及车等信号,同时提供相应的调用接口及协议。
支持 CAN 总线调用 XBR1939 -71)进行减速度请求 ,若定义不一致提供相应的接口协议 。
1. 功能需求如下:
(1) 制动接口是减速度闭环控制模式,可适应不同的载荷;
(2) 制动请求应有通信安全校验机,如制动请求应有通信安全校验机,如 Counter, checksum校验等 ,校验失败不响应请求 ;
(3) 自动驾驶请求减速度控制模式下线动系统应有驾驶员干预退出机制;
(4) 可支持人工驾驶制动助力模式 、自动驾驶线控制动模式两种方式共存。
(5) 制动灯控, 制动系统响应 ADU 减速度请求执行制动控的同时点亮灯;
四、 线控驱动系统
线控驱动系统( VCU )支持 CAN 总线控制车辆加速度或发动机(电)扭矩, 根据 ADU发送的 扭矩请求响应加速请求 ,同时反馈当前的控制状态、发动机(电)转速 、摩擦 /损耗扭矩等信号 等信号 。具体由驱动系统(VCU) 自行定义,需提供详细定义、调用协议等。
1. 功能需求如下:
(1) 驱动接口是发动机(电)扭矩控制模式(百分比)或轮边扭矩控制模式。
(2) 驱动请求应有通信安全校验机制,如驱动请求应有通信安全校验机制,如 Counter, checksum校验等 ,校验失败不响应请求 。
(3) 自动驾驶请求扭矩控制模式下线驱动系统应有驾驶员干预退出机制,至少包含踩下制动踏板后退出。
(4) 可支持人工驾驶动力模式、自动驾驶线控驱动模式两种方共存。