实景三维模型高逼真、高真实、高精度的展示地物的几何结构、纹理色彩、空间位置等信息,在当前测绘应急保障、规划等领域具备极大的应用价值。但是,激光雷达和倾斜摄影建模技术均无法较好的满足快速建模应用需求,具体表现在:激光点云数据空间点离散、缺乏语义信息,直接应用困难;倾斜摄影测量作业周期长、生产效率低下。
大势智慧顺应时代与行业发展需求,推出一款具备极简操作的快速测绘装备——大势速影:机载激光快速建模产品,为实景三维模型等测绘成果的快速输出和应用开辟了全新解决路径。
大势速影:
极简易操作的快速建模装备
大势速影产品由高效率采集硬件“速影 L100”和快速建模软件“速影模形(SoForm)”组成,可无缝集成大疆经纬M300 RTK无人机,同步实时、动态采集高精度点云和影像数据。大势速影具备上手快、易操作、建模速度快的特点,可实现DOM/DEM、TDOM、实景三维模型等二三维测绘数据成果的一体化输出。
速影L100是大势智慧自主研发的一款小型无人机激光雷达扫描设备,一体化集成激光雷达、高精度惯导与测绘相机,具有高集成、高密度、多回波、高点频等特点。仅1015g的超轻盈重量使得速影L100可完美搭载于大疆M300无人机,仅25分钟时间,即可在100米航高下,快速完成1平方公里测区的数据采集。
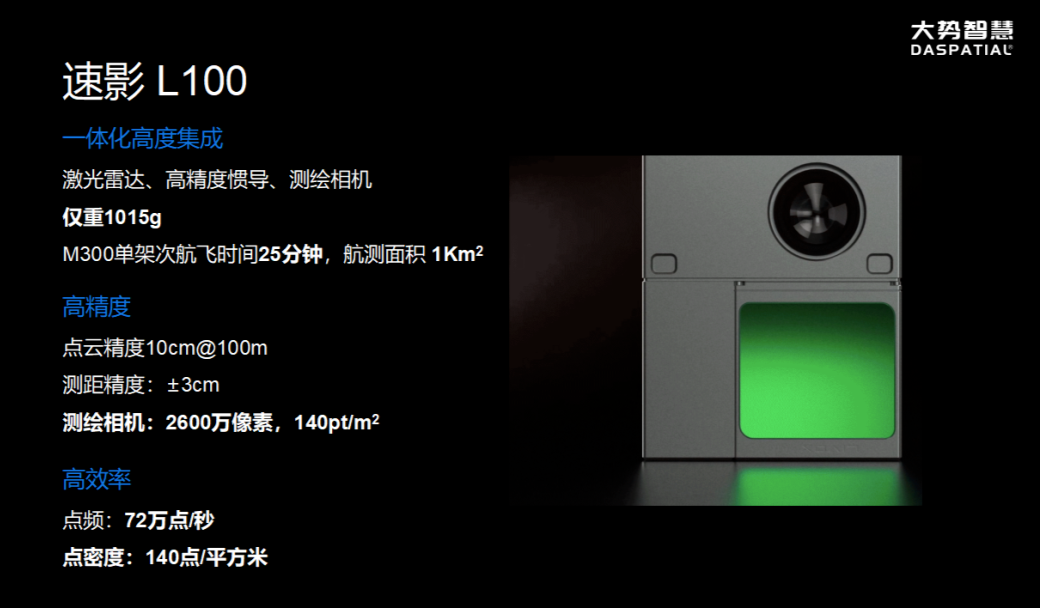
速影L100
“速影模形(SoForm)”是速影L100数据处理软件。基于大势智慧20余年的点云数据处理算法经验积淀,针对速影L100采集到的点云及影像进行专业化算法优化,输出的实景三维模形可媲美倾斜建模成果。同时软件采用向导式设计,简单易操作,无论是专业测绘人士,还是非专业用户均能轻松上手,一键获取多样测绘成果。

速影L100数据处理软件-速影模型
1.效率高:快速测绘,“分钟级”成果输出
大势速影适合快速测绘场景,相较于倾斜摄影测量建模动辄4小时以上的建模时长,大势速影建模效率提升了8倍。以0.6平方公里为例,大势速影只需15分钟,即可输出DEM、DSM成果;只需33分钟,即可生成实景三维模型(从点云到实景三维模型生成时间)。
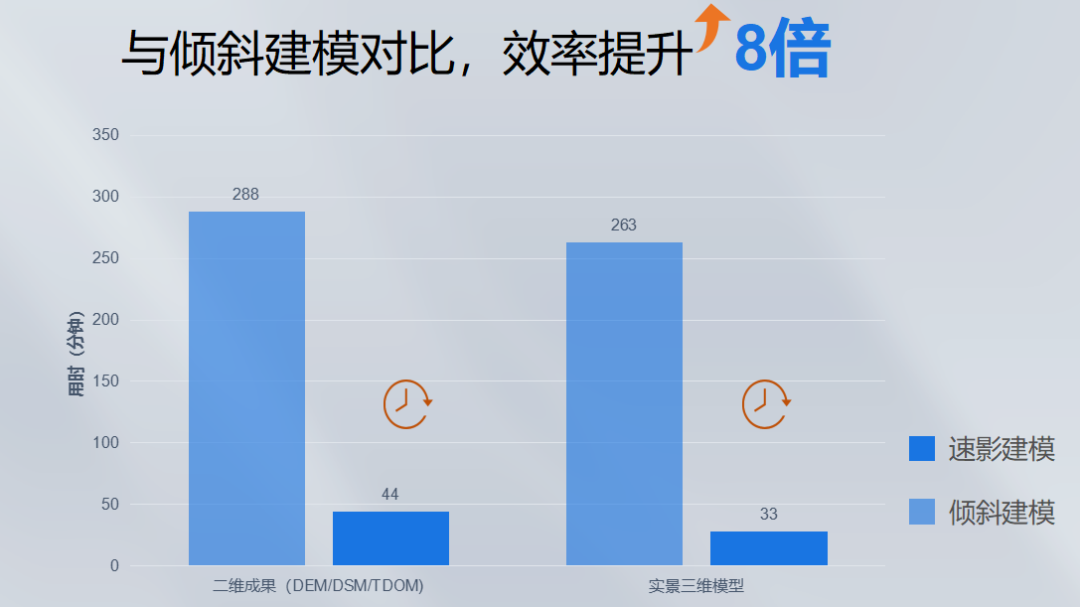
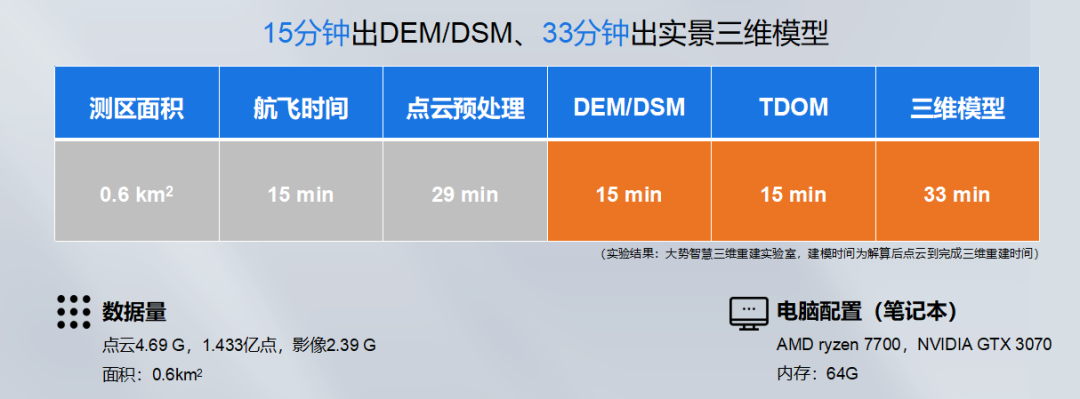
大势速影建模效率
速影模形采用集群设计,可完美运行于大势智慧自研的另一款可便携搬运的算力设备——重建农场便携版,实现“分钟级”建模,从而更好的满足自然灾害应急救援等需要快速测绘、快速出图的应用场景。

重建农场便携版
2.成果全:一次输入 同步生成多种数据成果
传统机载激光设备采集到的点云数据通常只是作为最终成果数据的原始输入,而影像数据只能用于给点云赋色,会丢失大量纹理细节。实际使用过程中,为获取最终的成果数据,用户需要在多个点云后处理软件中重复切换,不但学习成本高,数据处理复杂,耗费大量的时间和计算资源,而且无法充分挖掘高清影像数据的纹理价值。
速影模形将数据处理过程化繁为简,让用户告别专业复杂的软件操作,轻松高效得到多种二三维数据成果。软件采用人性化向导式设计,支持一键导入原始点云、影像、位置和姿态等信息,可同步快速输出彩色点云,TDOM、DSM\DEM与实景三维模形数据。
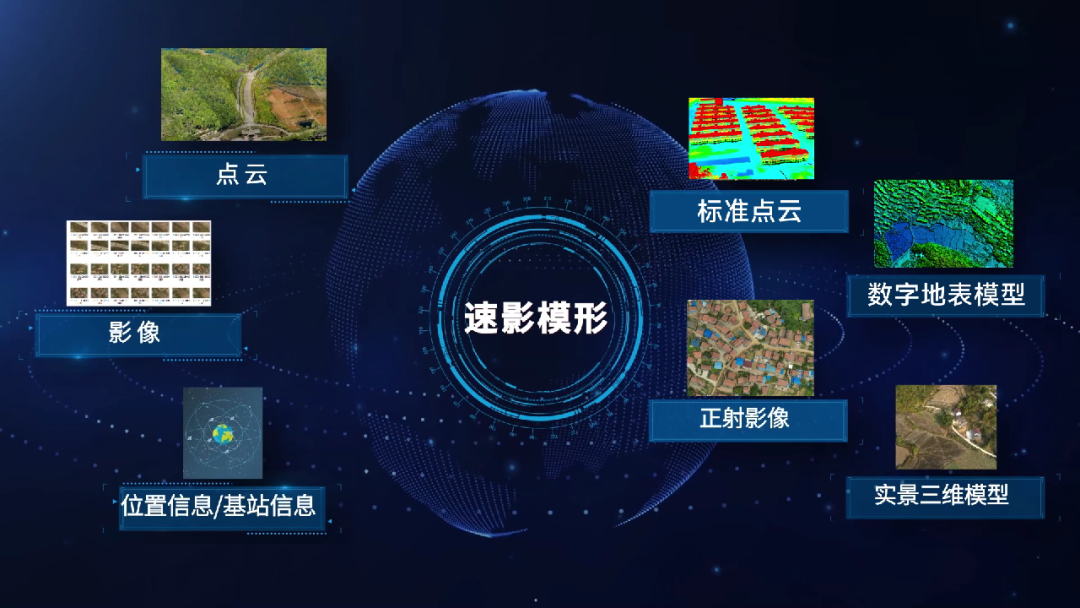
一次输入,同步生成多种数据成果
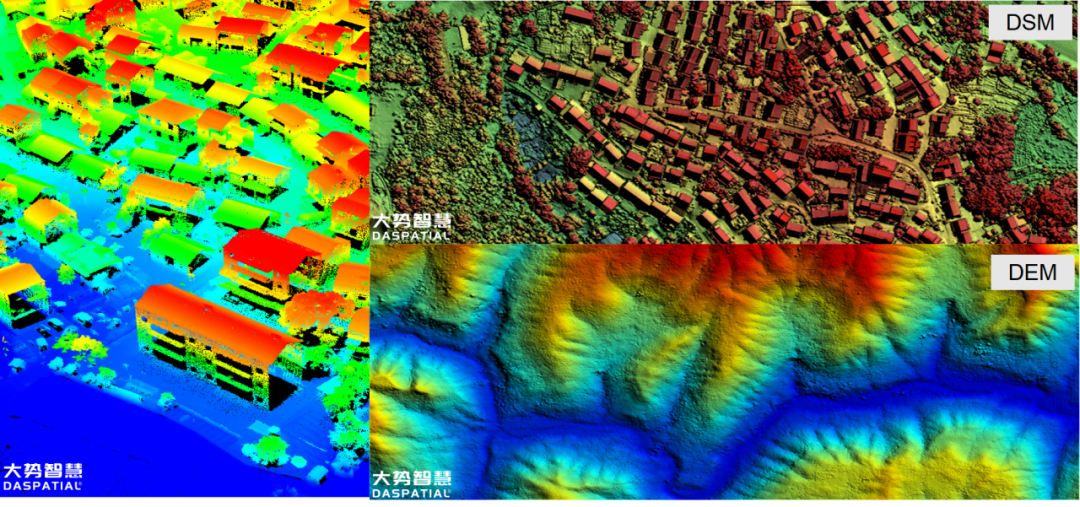
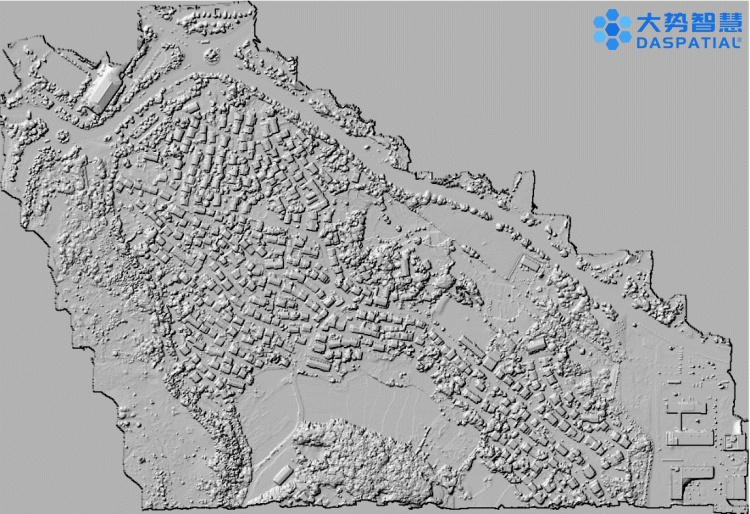
3.效果好:高精度数据成果 真实场景清晰复刻
由于在地形复杂区域,特别是在地形变化较大的区域,原始采集点云存在奇异点、数据空缺等问题,导致在生成DEM/DSM等地形数据时难以达到要求。速影模形通过高精度组合导航算法进行点云解算、自动粗差去除算法来获得高质量DSM数据;通过自动滤波算法生成高精度DEM数据,从而得到精准真实的地形数据。在PPK模式下,其高程精度大约为±6cm。
在真正射影像(TDOM)生成方面,速影模形采用点云和影像联合空三算法,有效解决传统DOM算法由于投影差而导致正射影像中建筑位置不准确、建筑倾斜以及道路遮盖等问题,从而得到高精度的真正射影像图(TDOM)。
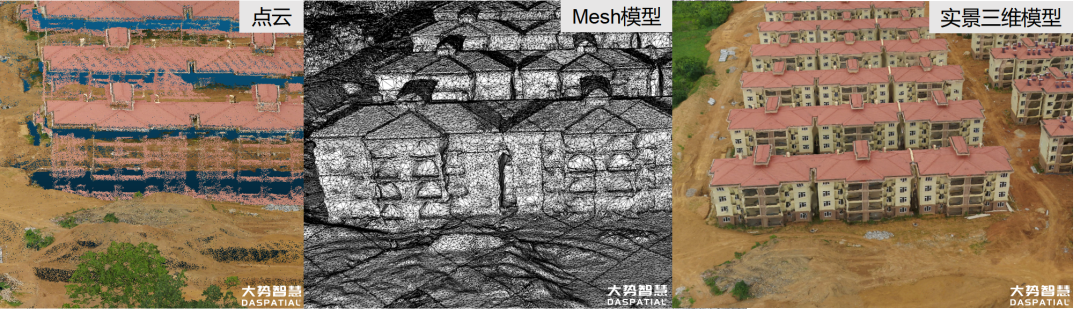
在实景三维模型构建方面,大势速影通过联合空三,成功将影像纹理映射中误差从空三前的8-10个像素降低到了3个像素以内。采用激光点云快速构建Mesh算法、高清影像纹理映射算法,所生成的模型不仅具有媲美倾斜建模的效果,还具有更优的几何结构和更细腻的纹理。
4.应用广:从数据到能力 满足多场景需求
基于大势速影高效的点云与影像数据采集能力,以及大势智慧独具优势的点云与影像融合建模算法,大势速影达到了效率与质量的“双高标准”。同时,一键输出多种数据成果更是让大势速影在应急、电力、林业、水利、矿山、规划等多个泛测绘应用领域里“游刃有余”,满足多个场景下的快速测绘需求。
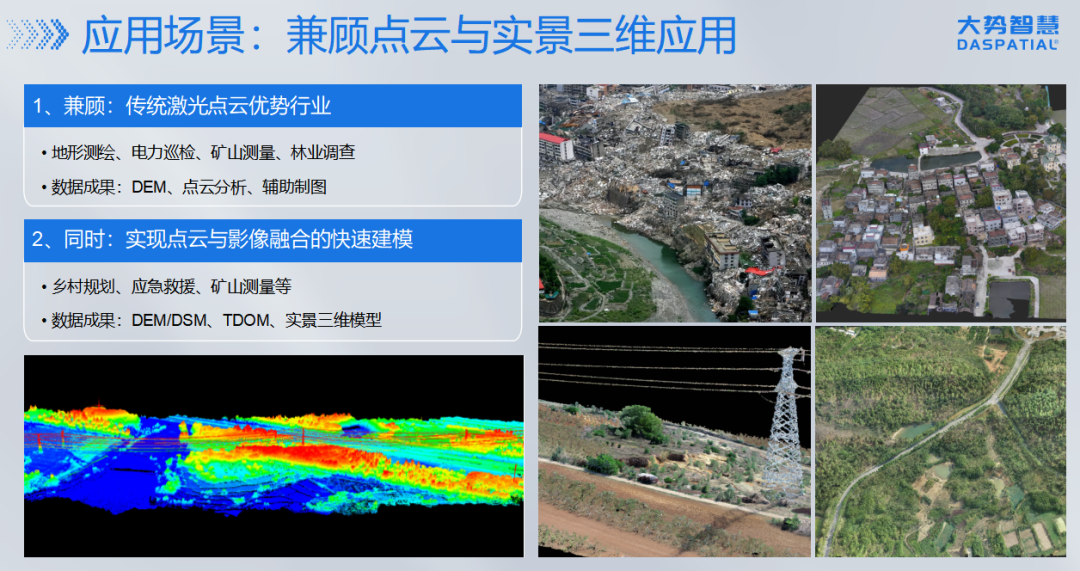
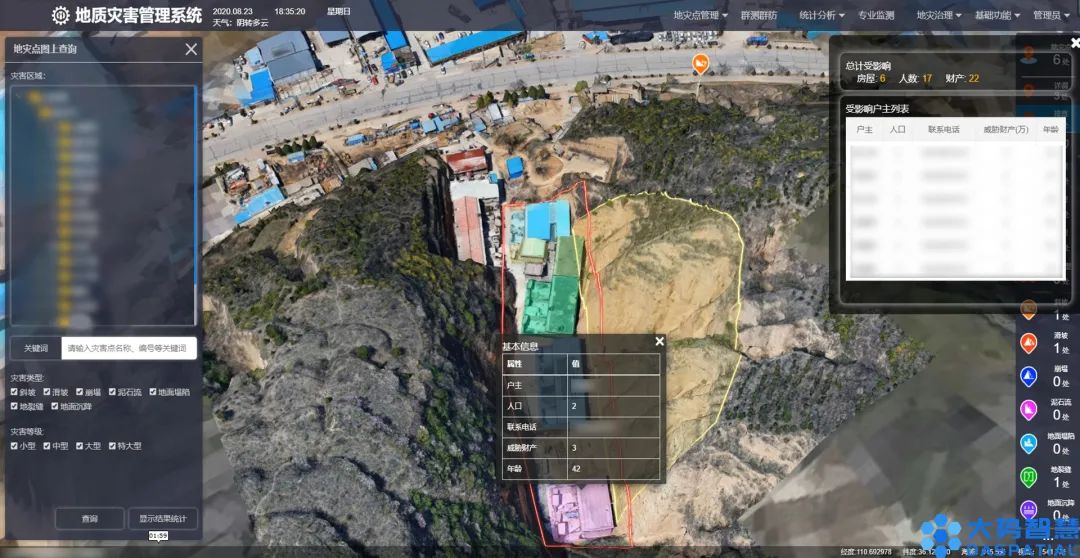
过去,在泥石流、滑坡、地震等自然灾害应急救援场景中,存在难以抵近灾害核心区域导致的测绘难度大,需要满足快速出图要求等问题,现在只需要使用大势速影进行快速的数据采集及二三维数据成果输出,可以在实景三维模型上进行量测分析得到山体的高差、坡度坡向等数据,极大提升了自然灾害应急救援工作的效率。同时,救援人员能够全方位掌握灾区地形地貌状况,制定针对性的整治和巡检措施,及时做出抢险决策。
在乡村规划领域,大势速影以其现场采集和快速输出多种二三维数据成果的能力,为乡村治理、乡村规划提供高现势性的底图数据,数据成果可直接接入规划设计软件,满足乡村规划应用场景下对多样测绘成果的需求。同时,大势速影也可广泛应用于农业产业园区规划、土地测量与开发、农田监管、旅游资源开发、生态修复等应用场景,提供快速、高现势性、成果全、效果好的二三维数据成果。


目前该产品针对不同的用户需求分别推出了标准版(速影L100+速影模型)、便携农场版和适配版。欢迎各位朋友积极参与试用,同时诚邀全国代理商与大势智慧共同深入探索实景三维技术在更多场景中的应用。